一种基于车轮谐振增益的瞬时纵向轮胎力最大化控制方法
- 国知局
- 2024-08-02 17:04:35
本发明涉及汽车动力学控制领域,尤其是分布式驱动电动汽车轮胎力控制领域。
背景技术:
1、在极限工况条件下,充分利用轮胎-路面的附着潜能对于改善汽车的行驶性能,提升车辆的主动安全性能具有重要现实价值。现代防抱死制动控制系统和驱动防滑控制系统利用轮胎-路面的滑移特性,通过调节作动力矩,将车轮滑移维持在峰值纵向轮胎力对应的最优滑移率附近,实现了轮胎-路面附着潜能的充分利用。过去,由于控制系统在信号传输方面延迟大、执行器动态性能较差等原因,使得在控制算法上采用基于规则的离散车轮滑移控制,此类控制算法的设计需要通过大量的试验完成在不同附着条件下的车轮减速度和滑移率门限值的标定,并且闭环控制系统的带宽较低,无法充分的利用轮胎-路面的附着潜能。然而随着智能电动车辆的发展,特别是分布式驱动电动汽车发展,使得对于极限工况下纵向瞬时轮胎力实现更加快速精准的控制成为可能,这是因为线控底盘和线控驱动系统从信号获取、信号传输、执行器性能等多个层面显著减少了控制系统的复杂性和扰动不确定性,并且以电机作为执行机构,其具有精确扭矩控制、响应带宽大,容易实现精确反馈等特点,为基于模型的连续车轮滑移控制提供了可能。然而不可避免的是,该算法需要对实时车轮滑移率和最优滑移率实现精确的估计,实现这一点对于目前车辆的标准传感器配置仍是困难的,特别是在低速条件下由于传感器噪声车速的估计不准确,使得车轮滑移控制失效。
技术实现思路
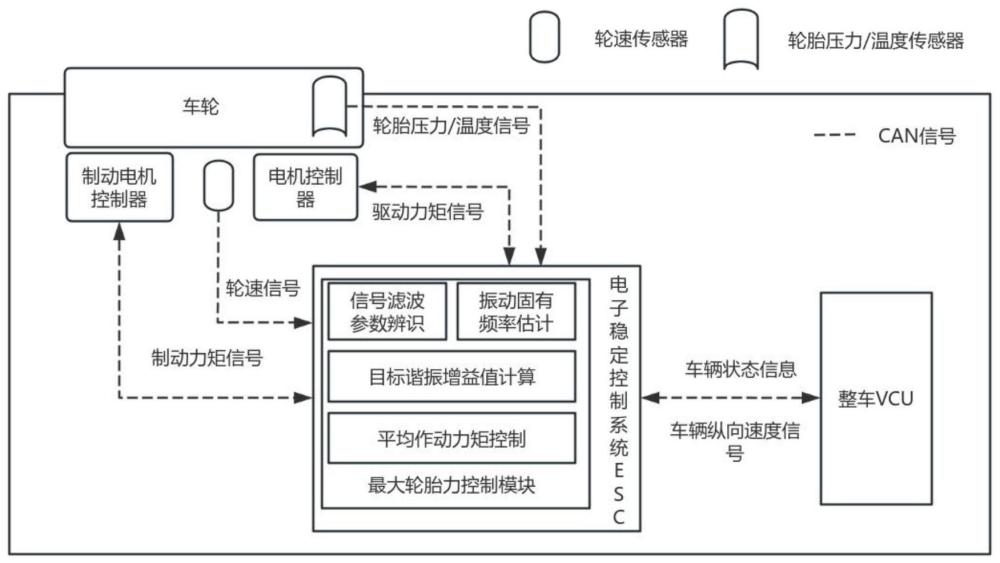
1、本发明利用车轮-路面构成的扭转振动系统能够反映车轮滑移特性这一原理,提出了一种分布式驱动电动汽车瞬时纵向轮胎力最大化控制方法,以期能利用现代车辆标配的传感器实现轮胎-路面附着潜能的充分利用,而无须实时估计滑移率和最优滑移率,能够实现低速条件下车辆滑移控制,保证汽车直线行驶安全和方向稳定性。
2、为解决上述技术问题,本发明所采用的技术方案包括如下步骤:
3、本发明一种基于车轮谐振增益的瞬时纵向轮胎力最大化控制方法的特点在于,包括以下步骤:
4、步骤1、获取当前时刻的轮胎压力信号p、当前时刻的车速信号vx、当前时刻的轮胎温度信号t,并通过查表估算当前时刻的胎体纵向刚度cfx和当前时刻的胎体纵向阻尼dfx;
5、步骤2、获取当前时刻的轮速原始信号ω,并对轮速原始信号ω进行带通滤波处理,获得带通滤波后的轮速信号ωbp,同时,对轮速原始信号ω进行低通滤波处理,获得低通滤波后的轮速信号ωlp;
6、步骤3、对带通滤波后的轮速信号ωbp进行快速傅里叶变换,计算各频率点处幅值,识别最大幅值对应的频率,得到车轮扭转振动共振频率ωn;
7、步骤4、计算车轮扭转振动固有频率ωn处,且车轮滑移刚度cfκ为零时对应的目标谐振增益值gcmd;
8、步骤5、根据当前时刻的车辆行驶状态,判断防抱死制动控制系统或者驱动防滑控制系统是否激活,若激活,则执行步骤6;否则,返回步骤1进行下一时刻处理;
9、步骤6、获取一个计算周期内的轮速增量δω与作动力矩增量δmd,从而计算当前时刻的谐振增益值
10、步骤7、若当前时刻的谐振增益gd低于目标谐振增益gcmd,则防抱死制动控制系统或者驱动防滑控制系统减少平均作动力矩否则,防抱死制动控制系统或者驱动防滑控制系统增加平均作动力矩
11、本发明所述的一种基于车轮谐振增益的瞬时纵向轮胎力最大化控制方法的特点也在于,所述步骤1中是通过试验标定胎体纵向刚度cfx和胎体纵向阻尼dfx与轮胎压力信号p、车速信号vx、轮胎温度信号t之间关系,并以map图形式进行存储。
12、所述步骤4中是利用式(1)计算目标谐振增益值gcmd:
13、
14、式(1)中,a1表示第一中间计算系数,且c1表示第二中间计算系数,且d1表示第三中间计算系数,且j为车轮转动惯量,re为车轮有效滚动半径。
15、所述步骤5中是通过计算实时车轮滑移率κ是否达到设定的滑移率门限值κc,以判断防抱死制动系统和驱动防滑控制系统是否激活;其中,滑移率门限值κc是根据试验标定给出;
16、对于驱动工况,利用式(2)计算实时车轮滑移率κ:
17、
18、对于制动工况,利用式(3)计算实时的车轮滑移率κ:
19、
20、所述步骤7中平均作动力矩是通过控制一个振动周期内作动力矩md的增加时间与作动力矩md的减少时间之间的比值实现的;
21、当增加平均制动力矩时,在一个振动周期范围内,作动力矩md增加的时间大于作动力矩md减少的时间;
22、当减少均制动力矩时,在一个振动周期范围内,作动力矩md增加的时间小于作动力矩md减少的时间。
23、所述步骤6中的作动力矩增量δmd是按如下过程计算:
24、对于防抱死制动控制系统,通过测量一个计算周期内的轮缸压力增量δpw,从而计算得到作动力矩增量δmd=γδpw,其中,γ为制动效能因数,并由试验标定给出;
25、对于驱动防滑控制系统,通过测量一个计算周期内的电机电流增量δiq,从而计算得到作动力矩增量δmd=kδiq,其中,k为电机转矩系数,并由试验标定给出。
26、本发明一种电子设备,包括存储器以及处理器的特点在于,所述存储器用于存储支持处理器执行所述瞬时纵向轮胎力最大化控制方法的程序,所述处理器被配置为用于执行所述存储器中存储的程序。
27、本发明一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序的特点在于,所述计算机程序被处理器运行时执行所述瞬时纵向轮胎力最大化控制方法的步骤。
28、与现有技术相比,本发明的有益效果体现在:
29、1、本发明提出了一种分布式驱动电动汽车瞬时纵向轮胎力最大化控制方法,通过利用纵向轮胎力与车轮滑移刚度关系,特别是在峰值纵向轮胎力点,车轮滑移刚度为零这一特点间接反映了车轮最优滑移与峰值纵向轮胎力的关系,因此无需估计实时车轮滑移率与最优滑移率。为了进一步的估计车轮滑移刚度,本发明利用施加的与车轮扭转振动系统固有频率相同的作动力矩振动,并通过检测轮速-作动力矩谐振增益值反映实时车轮滑移刚度变化情况,可以充分发挥执行器潜能并且只需要采用采用现代车辆标配传感器,无需额外的增加传感器,从而具有结构简单,容易实现,鲁棒性能好的优点。
30、2、本发明通过理论分析推导了轮胎扭转振动固有频率点处车轮滑移刚度与轮速-作动力矩谐振增益值的解析关系,能够准确的给出最大纵向轮胎力值对应的目标的轮速-作动力矩增益值。特别的,该解析表达式给出了目标的轮速-作动力矩增益值对于车速、胎体纵向刚度、胎体纵向阻尼的依赖关系,为算法设计过程中的参数标定提供了理论支持,减少了参数标定的盲目性性,从而减少了开发时间。
31、3、区别于离散车轮滑移控制中需要实时判断路面条件变化,并根据当前路面条件重新选择新的减速度门限值,且区别于连续车轮滑移控制算法,对于不同路面需要选择不同的最优滑移率设定点,本发明利用在峰值轮胎点处的车轮滑移刚度为零这一特点,对于不同的路面条件都有相同的控制条件,这允许使用固定结构的控制器,并且无需路面附着条件的检测。
32、4、针对轮速-作动力矩谐振增益随车速、胎体纵向阻尼以及胎体纵向刚度变化情况,本发明借助于汽车中标配的传感器信号,可以通过离线标定和在线估计两种方式结合进行确定上述参数,具有结构简单易于实现的技术特征,无需获得参数以及状态变量的精确观测值,克服了采用复杂状态观测算法实时性难以达到以及观测精度较差问题,从而提高了方法的稳定性。
本文地址:https://www.jishuxx.com/zhuanli/20240718/253915.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表