一种自动泊车的方法、装置、计算机设备及存储介质
- 国知局
- 2024-08-02 17:06:12
本发明属于自动泊车领域,具体涉及一种自动泊车的方法、装置、计算机设备及存储介质。
背景技术:
1、随着机器自动化的高速发展与电子家具的普及,智能化与人性化的概念越来越趋于平常。由于交通运输车辆及私家用车的不断增加,导致了有限的停车位和越来越小的停车距离之间产生了矛盾。由于人们生理上的限制如视觉盲区和注意力分散,致使一部分人无法快速、规范地停车,进而导致一系列的道路拥堵与交通事故。
2、现有的技术方案是通过在车辆后方和/或四周搭载影像获取设备,在车辆处于倒挡的情况下,通过车载显示器展示倒车影像,减少驾驶员的视觉盲区来帮助驾驶员进行泊车。但是受限于驾驶员的驾驶水平以及车辆周围的空间环境,导致很多情况下驾驶员无法快速找到车位并进行规范停车,造成拥堵与交通事故。
技术实现思路
1、为了解决现有的泊车问题,本发明提供了一种自动泊车的方法、装置、计算机设备及存储介质
2、为了实现上述目的,本发明提供如下技术方案:
3、第一方面,本发明提供了一种自动泊车方法,所述方法包括:
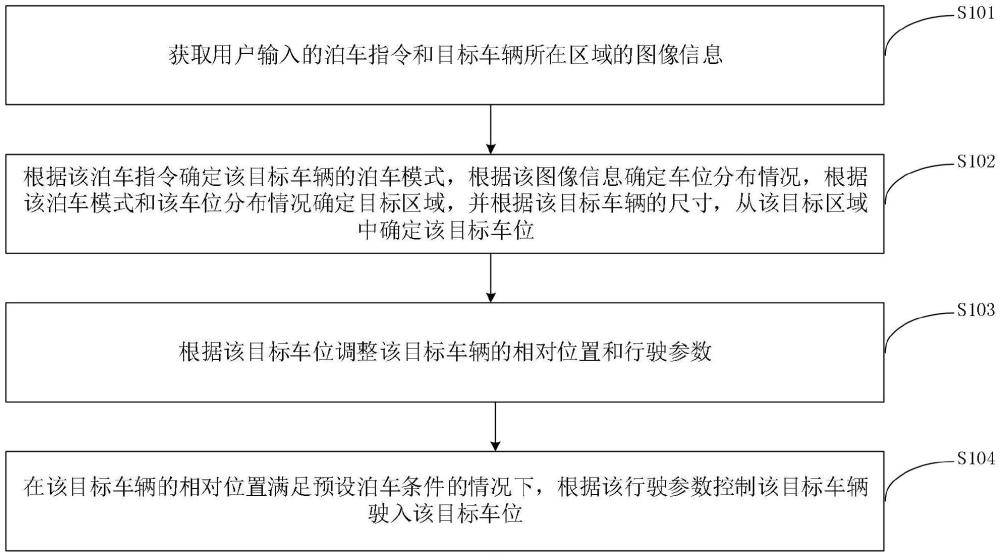
4、获取用户输入的泊车指令和目标车辆所在区域的图像信息;
5、根据所述泊车指令确定所述目标车辆的泊车模式,根据所述图像信息确定车位分布情况;根据所述泊车模式和所述车位分布情况确定目标区域;根据所述目标车辆的尺寸,从所述目标区域中确定所述目标车位;所述目标区域表征所述目标车位所在的区域;
6、根据所述目标车位调整所述目标车辆的相对位置和行驶参数;
7、在所述目标车辆的相对位置满足预设泊车条件的情况下,根据所述行驶参数控制所述目标车辆驶入所述目标车位。
8、可选地,所述目标车辆所在区域的图像信息通过以下方式获取:
9、通过所述目标车辆的车载图像获取设备获取所述图像信息;
10、或者,控制所述目标车辆与所述目标车辆所在区域的管理系统建立通信连接,通过所述管理系统获取所述图像信息。
11、可选地,根据所述泊车指令确定泊车模式包括:
12、获取所述目标车辆的当前行驶参数;
13、根据用户输入的泊车指令,确定所述当前行驶参数是否满足所述预设泊车条件;
14、在确定所述当前行驶参数满足泊车条件的情况下,根据所述泊车指令选择泊车模式。
15、可选地,所述根据所述泊车模式和所述图像信息确定目标车位包括:
16、根据所述图像信息获取车位分布情况;
17、根据所述泊车模式和所述车位分布情况确定目标区域;所述目标区域表征所述目标车位所在的区域;
18、根据所述目标车辆的尺寸,从所述目标区域中确定所述目标车位。
19、可选地,所述泊车模式包括:侧方位停车模式、垂直方向停车模式、指定车位停车模式和自由停车模式,所述根据所述泊车模式和所述车位分布情况确定目标区域包括:
20、根据所述泊车模式确定所述目标车位的车位形状;
21、根据所述车位分布情况和所述车位形状,确定所述目标区域。
22、可选地,所述根据所述目标车辆的尺寸,从所述目标区域中确定所述目标车位包括:
23、获取所述目标区域中车位的车位尺寸;
24、根据所述目标车辆的尺寸确定预设尺寸阈值;
25、在所述车位尺寸大于或等于所述尺寸阈值的情况下,确定所述车位为目标车位。
26、可选地,所述根据所述目标车位调整所述目标车辆的相对位置和行驶参数包括:
27、根据所述目标车位确定预设泊车条件;
28、根据所述预设泊车条件调整所述目标车辆的行驶参数和与目标车位的相对位置。
29、第二方面,本发明提供了一种自动泊车装置,所述装置包括:
30、获取模块,用于获取用户输入的泊车指令和目标车辆所在区域的图像信息;
31、确定模块,用于根据所述泊车指令确定所述目标车辆的泊车模式,根据所述图像信息确定车位分布情况;根据所述泊车模式和所述车位分布情况确定目标区域;根据所述目标车辆的尺寸,从所述目标区域中确定所述目标车位;所述目标区域表征所述目标车位所在的区域;
32、调整模块,用于根据所述目标车位调整所述目标车辆的相对位置和行驶参数;
33、驱动模块,用于在所述目标车辆的相对位置满足预设泊车条件的情况下,根据所述行驶参数控制所述目标车辆驶入所述目标车位。
34、可选地,所述获取模块还用于与所述目标车辆所在区域的管理系统建立通信连接,通过所述管理系统获取所述图像信息。
35、可选地,所述获取模块还用于获取所述目标车辆的当前行驶参数;
36、所述确定模块还用于根据用户输入的泊车指令,确定所述当前行驶参数是否满足所述预设泊车条件;
37、在确定所述当前行驶参数满足泊车条件的情况下,根据所述泊车指令选择泊车模式。
38、可选地,所述泊车模式包括:侧方位停车模式、垂直方向停车模式、指定车位停车模式和自由停车模式,所述确定模块还用于根据所述泊车模式确定所述目标车位的车位形状;根据所述车位分布情况和所述车位形状,确定所述目标区域。
39、可选地,所述获取模块还用于获取所述目标区域中车位的车位尺寸;
40、所述确定模块还用于根据所述目标车辆的尺寸确定预设尺寸阈值;在所述车位尺寸大于或等于所述尺寸阈值的情况下,确定所述车位为目标车位。
41、可选地,所述确定模块用于根据所述目标车位确定预设泊车条件;
42、所述调整模块还用于根据所述预设泊车条件调整所述目标车辆的行驶参数和与目标车位的相对位置。
43、第三方面,本发明提供了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述自动泊车的方法。
44、第四方面,本发明提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述自动泊车的方法。
45、本发明提供的自动泊车的方法具有以下有益效果:
46、采用上述方法,通过泊车模式和图像信息,可以快速确定目标车位所在位置,并通过目标车辆的尺寸确定该位置内符合要求的目标车位,避免了驾驶员可能存在视野盲区或者受限于驾驶员水平等情况导致无法快速找到可以停车的目标车位,并通过调整车辆与车位的相对位置以及车辆的行驶参数,使车辆能够规范地驶入目标车位进行停车,避免了可能存在的拥堵或者交通事故。
技术特征:1.一种自动泊车方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述目标车辆所在区域的图像信息通过以下方式获取:
3.根据权利要求1所述的方法,其特征在于,根据所述泊车指令确定泊车模式包括:
4.根据权利要求1所述的方法,其特征在于,所述泊车模式包括:侧方位停车模式、垂直方向停车模式、指定车位停车模式和自由停车模式,所述根据所述泊车模式和所述车位分布情况确定目标区域包括:
5.根据权利要求1所述的方法,其特征在于,所述根据所述目标车辆的尺寸,从所述目标区域中确定所述目标车位包括:
6.根据权利要求5所述的方法,其特征在于,所述根据所述目标车位调整所述目标车辆的相对位置和行驶参数包括:
7.一种自动泊车装置,其特征在于,包括:
8.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述权利要求1~6任一所述的方法。
9.一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述权利要求1~6任一项所述的方法。
技术总结本发明提供了一种自动泊车的方法、装置、计算机设备及存储介质,属于自动泊车领域,该方法包括:获取泊车指令和目标车辆所在区域的图像信息;根据该泊车指令确定泊车模式,根据该图像信息确定车位分布情况;根据该泊车模式和该车位分布情况确定目标区域;根据该目标车辆的尺寸,确定该目标车位;根据该目标车位调整相对位置和行驶参数;在该相对位置满足预设泊车条件的情况下,根据该行驶参数控制该目标车辆驶入该目标车位。这样,通过泊车模式和图像信息,快速确定目标车位所在位置,并通过目标车辆的尺寸确定目标车位,避免驾驶员无法快速找到可以停车的目标车位,并通过调整相对位置以及行驶参数,使车辆能够快速规范地驶入目标车位进行停车。技术研发人员:李翠花,高先和,周泽华,冯玉武,李瑶,郑泽成,李桂芬,叶文豪,夏小芮,曹昱昊受保护的技术使用者:合肥大学技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240718/254118.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表