一种滑跑起降无人机航时设计方法与流程
- 国知局
- 2024-08-01 05:24:47
本发明属于无人机,尤其涉及一种滑跑起降无人机航时设计方法。
背景技术:
1、无人机飞行航时是无人机系统的核心指标。无人机总体设计阶段,飞行航时设计计算是否准确将直接影响无人机气动外形、动力系统、全机成本等关键设计项。目前,无人机航时设计主要采用平飞分段油耗计算方法,即将无人机平飞过程分为若干时间段,使用工程经验公式估算总油耗及总航时。然而,该方法未考虑无人机暖机、滑跑、爬升、平飞、下降、着陆等全飞行过程,同时时间分段尺度过大,不能反应平飞过程的实时油耗,导致综合计算误差较大,存在明显的局限性。
技术实现思路
1、本发明的技术解决问题:克服现有技术的不足,提供一种滑跑起降无人机航时设计方法,将现有平飞分段油耗计算方法扩展为全过程油耗计算以及平飞瞬时油耗计算,显著提高了无人机飞行航时的设计计算准确性。
2、为了解决上述技术问题,本发明公开了一种滑跑起降无人机航时设计方法,包括:
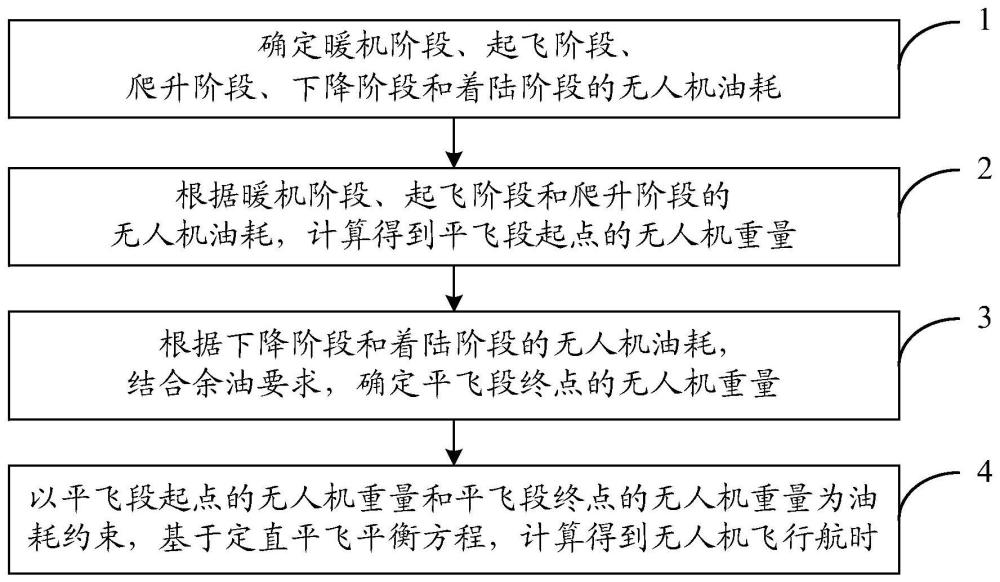
3、确定暖机阶段、起飞阶段、爬升阶段、下降阶段和着陆阶段的无人机油耗;
4、根据暖机阶段、起飞阶段和爬升阶段的无人机油耗,计算得到平飞段起点的无人机重量m1;
5、根据下降阶段和着陆阶段的无人机油耗,结合余油要求,确定平飞段终点的无人机重量m2;
6、以m1和m2为油耗约束,基于定直平飞平衡方程,计算得到无人机飞行航时。
7、在上述滑跑起降无人机航时设计方法中,通过如下公式计算得到平飞段起点的无人机重量m1:
8、m1=mf-δm1-δm2
9、其中,mf表示满油起飞重量,δm1表示暖机阶段和起飞阶段的无人机油耗,δm2表示爬升阶段的无人机油耗。
10、在上述滑跑起降无人机航时设计方法中,通过如下公式确定δm2:
11、
12、其中,δhi表示爬升阶段第i时刻的高度,vi,sa表示爬升阶段第i时刻的最大爬升速度,表示爬升阶段的耗油率。
13、在上述滑跑起降无人机航时设计方法中,通过如下公式计算得到平飞段起点的无人机重量m2:
14、m2=me+δm3+δm4
15、其中,me表示考虑余油的空机重量,δm3表示陆阶段的无人机油耗,δm4表示下降阶段的无人机油耗。
16、在上述滑跑起降无人机航时设计方法中,通过如下公式确定δm4:
17、
18、其中,δhj表示下降阶段第j时刻的高度,vj,d表示下降阶段第j时刻的最大爬升速度,表示爬升阶段的耗油率。
19、在上述滑跑起降无人机航时设计方法中,以m1和m2为油耗约束,基于定直平飞平衡方程,计算得到无人机飞行航时,包括:
20、基于定直平飞平衡方程,通过数值方法计算得到阻力系数cd;
21、根据计算得到的阻力系数cd,结合纵向力平衡方程,计算得到发动机需用推力t;
22、根据计算得到的发动机需用推力t,结合功率公式,计算得到发动机需用功率p;
23、根据发动机需用功率p,通过对发动机参数表进行查表,确定发动机需用功率p对应的瞬时耗油率
24、自平飞段起点的无人机重量m1开始,每经过一个时间步长δt,基于瞬时耗油率更新无人机实时重量,直至无人机实时重量降至m2;
25、统计所经过的n个时间步长δt,得到无人机飞行航时为n·δt。
26、在上述滑跑起降无人机航时设计方法中,定直平飞平衡方程表示如下:
27、
28、其中,v表示设计平飞速度,m表示无人机瞬时重量,g表示无人机所在高度重力加速度,cl表示升力系数,ρ表示无人机所在高度大气密度,s表示无人机气动参考面积,α表示飞行迎角。
29、在上述滑跑起降无人机航时设计方法中,纵向力平衡方程表示如下:
30、
31、在上述滑跑起降无人机航时设计方法中,功率公式表示如下:
32、p=tv。
33、在上述滑跑起降无人机航时设计方法中,无人机实时重量更新公式如下:
34、
35、其中,mt+δt表示t+δt时刻无人机实时重量,mt表示t时刻无人机实时重量。
36、本发明具有以下优点:
37、(1)本发明公开了一种滑跑起降无人机航时设计方法,将现有平飞分段油耗计算方法扩展为全过程油耗计算以及平飞瞬时油耗计算,显著提高了无人机飞行航时的设计计算准确性。
38、(2)本发明公开了一种滑跑起降无人机航时设计方法,能够容忍各飞行阶段油耗计算的耦合性,特别是能够准确得到平飞过程起止点的无人机重量约束。
39、(3)本发明公开了一种滑跑起降无人机航时设计方法,能够计算平飞过程无人机的瞬时油耗,以及对应的无人机瞬时重量和当前航时。
40、(4)本发明公开了一种滑跑起降无人机航时设计方法,具有良好的拓展性,适用于不同标准飞行工况的滑跑起降无人机航时设计。
技术特征:1.一种滑跑起降无人机航时设计方法,其特征在于,包括:
2.根据权利要求1所述的滑跑起降无人机航时设计方法,其特征在于,通过如下公式计算得到平飞段起点的无人机重量m1:
3.根据权利要求2所述的滑跑起降无人机航时设计方法,其特征在于,通过如下公式确定δm2:
4.根据权利要求1所述的滑跑起降无人机航时设计方法,其特征在于,通过如下公式计算得到平飞段起点的无人机重量m2:
5.根据权利要求4所述的滑跑起降无人机航时设计方法,其特征在于,通过如下公式确定δm4:
6.根据权利要求5所述的滑跑起降无人机航时设计方法,其特征在于,以m1和m2为油耗约束,基于定直平飞平衡方程,计算得到无人机飞行航时,包括:
7.根据权利要求6所述的滑跑起降无人机航时设计方法,其特征在于,定直平飞平衡方程表示如下:
8.根据权利要求7所述的滑跑起降无人机航时设计方法,其特征在于,纵向力平衡方程表示如下:
9.根据权利要求8所述的滑跑起降无人机航时设计方法,其特征在于,功率公式表示如下:
10.根据权利要求6所述的滑跑起降无人机航时设计方法,其特征在于,无人机实时重量更新公式如下:
技术总结本发明公开了一种滑跑起降无人机航时设计方法,包括:确定暖机阶段、起飞阶段、爬升阶段、下降阶段和着陆阶段的无人机油耗;根据暖机阶段、起飞阶段和爬升阶段的无人机油耗,计算得到平飞段起点的无人机重量m<subgt;1</subgt;;根据下降阶段和着陆阶段的无人机油耗,结合余油要求,确定平飞段终点的无人机重量m<subgt;2</subgt;;以m<subgt;1</subgt;和m<subgt;2</subgt;为油耗约束,基于定直平飞平衡方程,计算得到无人机飞行航时。本发明将现有平飞分段油耗计算方法扩展为全过程油耗计算以及平飞瞬时油耗计算,显著提高了无人机飞行航时的设计计算准确性。技术研发人员:彭思嘉,任云鹏,杨鑫,高强,唐洁,李浩天,刘勇,张琦受保护的技术使用者:四川航天电子设备研究所技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240722/219611.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。