一种可防撞缓冲的智能无人飞行器的制作方法
- 国知局
- 2024-08-01 05:25:04
本技术涉及无人机,具体为一种可防撞缓冲的智能无人飞行器。
背景技术:
1、无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。
2、在无人机技术领域,已有相关专利,如公开号为cn211391665u的专利公开了一种智能调节机身平衡的无人机飞行器,主体的一侧固定有连接臂,连接臂的一侧设置有配重块,连接臂靠近配重块的一侧设置有滑轨,其中,主体靠近连接臂的一侧设置有第一电机,第一电机的一侧连接有丝杆,丝杆贯穿于配重块,连接臂的一侧固定有第二电机,第二电机的一侧固定有连接块,连接块的一侧开设有凹槽,通过调节配重块与主体之间的距离便于对主体的机身平衡性进行调节。
3、然而上述专利其实在实际的操作中还存在以下问题:
4、无人飞行器在飞行的过程中,可能会出现意外导致无人机碰撞到异物或者突发坠落的问题,容易导致内部元件损坏,影响无人机的使用寿命,同时在无人机降落时,与地面的碰撞过于强烈的话也会对元件造成影响。
技术实现思路
1、本实用新型的目的在于提供一种可防撞缓冲的智能无人飞行器,可以解决现有技术中的问题。
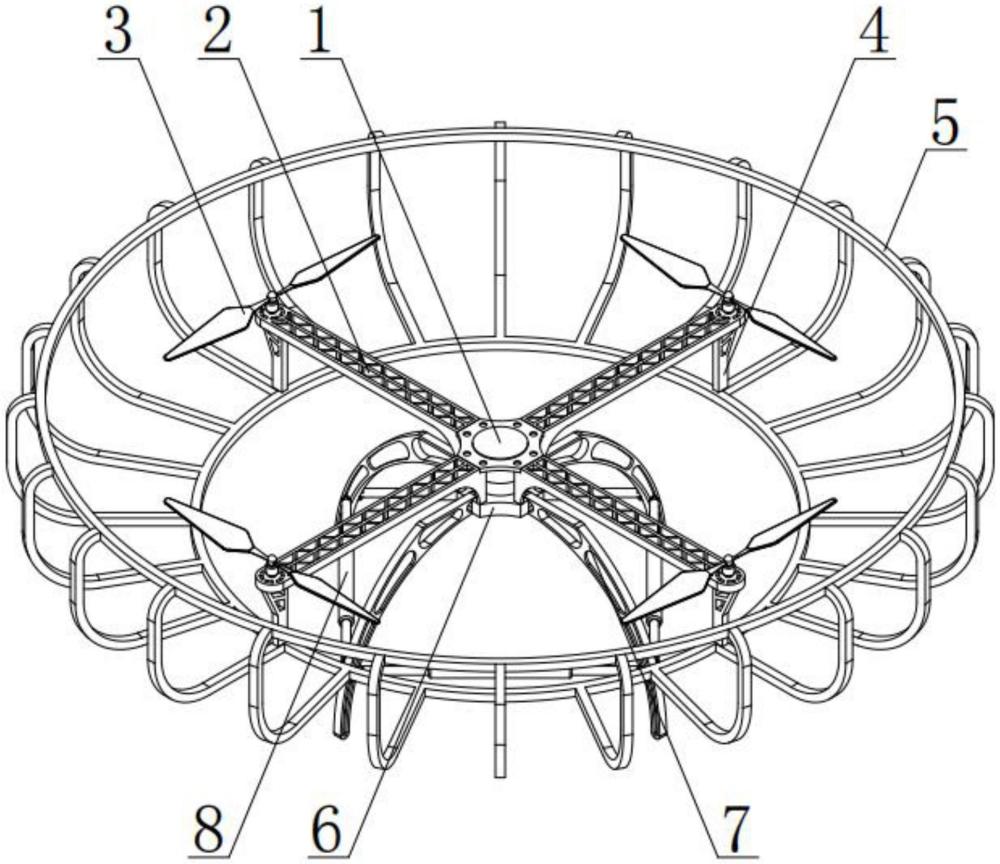
2、为实现上述目的,本实用新型提供如下技术方案:一种可防撞缓冲的智能无人飞行器,包括无人机主体,所述无人机主体的外侧设置有四根机翼杆,四根机翼杆整体呈“x”型设置,机翼杆远离无人机主体的一端的顶部设置有螺旋桨,机翼杆远离无人机主体的一端的底部设置有底接杆,底接杆上连接有防撞框,无人机主体的底部设置有支腿连架,支腿连架上连接有支撑脚,支撑脚设置有四个,相邻的支撑脚两两之间连接有缓震组件。
3、优选的,所述防撞框包括顶圈、侧杆和底圈,顶圈设置于机翼杆的上方,底圈设置于机翼杆的下方,顶圈和底圈之间连接有侧杆,侧杆环绕螺旋桨设置。
4、优选的,所述底圈与底接杆远离机翼杆的一端固定连接。
5、优选的,所述支腿连架包括接板,接板的外侧设置有四个连接端,连接端的内部设置有轴销,连接端与支撑脚之间通过轴销连接。
6、优选的,所述支撑脚上均匀开设有通孔,支撑脚的两侧均设置有连接轴销,连接轴销的顶部设置有锁扣,相邻的支撑脚之间的缓震组件通过连接轴销连接。
7、优选的,所述缓震组件包括内杆、套头、外管、管槽、抵接片和弹簧,外管的两端均开设有管槽,管槽的内部滑动设置有内杆,管槽开口处的内径小于管槽的内径,管槽开口处的内径与内杆的外径相匹配,内杆的一端设置有套头,套头与连接轴销之间轴销连接,内杆的另一端设置有抵接片,管槽的内部设置有弹簧,弹簧环绕设置于内杆的外侧,内杆与抵接片抵接。
8、与现有技术相比,本实用新型的有益效果如下:
9、1.本实用新型的底接杆上连接有防撞框,在飞行器进行飞行工作时,防撞框可以对飞行器整体进行防护,在发生碰撞时,防撞框不仅可以对螺旋桨进行防护,同时可以对无人机主体进行防护,防止内部的精密元件受损,提高使用寿命。
10、2.本实用新型的支撑脚的两侧均设置有连接轴销,相邻的支撑脚之间的缓震组件通过连接轴销连接,在飞行器降落或发生碰撞时,飞行器下落使得支撑脚与地面接触,在接触时,内杆由管槽向外滑出,内杆滑出时带动抵接片移动,抵接片移动时对弹簧进行挤压,通过弹簧对支撑脚的受力进行缓冲,缓震组件的设置可以在飞行器降落时对支撑脚的受力进行缓冲,总而降低飞行器整体在降落或落地时整体所受到的冲击力,避免冲击或震动对飞行器整体的内部精密元件造成损坏。
技术特征:1.一种可防撞缓冲的智能无人飞行器,包括无人机主体(1),其特征在于:所述无人机主体(1)的外侧设置有四根机翼杆(2),四根机翼杆(2)整体呈“x”型设置,机翼杆(2)远离无人机主体(1)的一端的顶部设置有螺旋桨(3),机翼杆(2)远离无人机主体(1)的一端的底部设置有底接杆(4),底接杆(4)上连接有防撞框(5),无人机主体(1)的底部设置有支腿连架(6),支腿连架(6)上连接有支撑脚(7),支撑脚(7)设置有四个,相邻的支撑脚(7)两两之间连接有缓震组件(8)。
2.根据权利要求1所述的一种可防撞缓冲的智能无人飞行器,其特征在于:所述防撞框(5)包括顶圈(51)、侧杆(52)和底圈(53),顶圈(51)设置于机翼杆(2)的上方,底圈(53)设置于机翼杆(2)的下方,顶圈(51)和底圈(53)之间连接有侧杆(52),侧杆(52)环绕螺旋桨(3)设置。
3.根据权利要求2所述的一种可防撞缓冲的智能无人飞行器,其特征在于:所述底圈(53)与底接杆(4)远离机翼杆(2)的一端固定连接。
4.根据权利要求1所述的一种可防撞缓冲的智能无人飞行器,其特征在于:所述支腿连架(6)包括接板(61),接板(61)的外侧设置有四个连接端(62),连接端(62)的内部设置有轴销,连接端(62)与支撑脚(7)之间通过轴销连接。
5.根据权利要求1所述的一种可防撞缓冲的智能无人飞行器,其特征在于:所述支撑脚(7)上均匀开设有通孔(71),支撑脚(7)的两侧均设置有连接轴销(72),连接轴销(72)的顶部设置有锁扣(73),相邻的支撑脚(7)之间的缓震组件(8)通过连接轴销(72)连接。
6.根据权利要求5所述的一种可防撞缓冲的智能无人飞行器,其特征在于:所述缓震组件(8)包括内杆(81)、套头(82)、外管(83)、管槽(84)、抵接片(85)和弹簧(86),外管(83)的两端均开设有管槽(84),管槽(84)的内部滑动设置有内杆(81),管槽(84)开口处的内径小于管槽(84)的内径,管槽(84)开口处的内径与内杆(81)的外径相匹配,内杆(81)的一端设置有套头(82),套头(82)与连接轴销(72)之间轴销连接,内杆(81)的另一端设置有抵接片(85),管槽(84)的内部设置有弹簧(86),弹簧(86)环绕设置于内杆(81)的外侧,内杆(81)与抵接片(85)抵接。
技术总结本技术公开了一种可防撞缓冲的智能无人飞行器,属于无人机技术领域。为解决飞行器在飞行过程中意外碰撞或落地时产生的震动对无人机内部元件造成影响的问题,底接杆上连接有防撞框,在飞行器进行飞行工作时,防撞框可以对飞行器整体进行防护,在发生碰撞时,防撞框不仅可以对螺旋桨进行防护,同时可以对无人机主体进行防护,防止内部的精密元件受损,提高使用寿命,支撑脚的两侧均设置有连接轴销,相邻的支撑脚之间的缓震组件通过连接轴销连接,缓震组件的设置可以在飞行器降落时对支撑脚的受力进行缓冲,总而降低飞行器整体在降落或落地时整体所受到的冲击力,避免冲击或震动对飞行器整体的内部精密元件造成损坏。技术研发人员:杜绍林受保护的技术使用者:安徽靓马信息科技股份有限公司技术研发日:20230919技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240722/219630.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表