一种多旋翼无人机起落架
- 国知局
- 2024-08-01 05:24:55
本发明涉及多旋翼无人机,具体为一种多旋翼无人机起落架。
背景技术:
1、多旋翼无人机,是一种具有三个及以上旋翼轴的特殊的无人驾驶直升机。其通过每个轴上的电动机转动,带动旋翼,从而产生升推力。旋翼的总距固定,而不像一般直升机那样可变。通过改变不同旋翼之间的相对转速,可以改变单轴推进力的大小,从而控制飞行器的运行轨迹,起落架是多旋翼无人机不可缺少的一部分,起落架是无人机下部用于起飞降落支撑的附件装置。起落架是唯一一种支撑整架无人机的部件,因此它是无人机不可分缺的一部分,没有它无人机便不能稳定的起飞与降落,现有的多旋翼无人机通常是由三角安装板、安装孔、支撑架与支撑杆等部件组成的,传统的无人机起落架通常可以通过支撑架与支撑杆在起降时可以对无人机进行支撑,但是大多数无人机起落架起降的限制较多,一般都需要在地面较为平整的位置进行起降,当地面凹凸不平时,起降时会造成无人机的机身不稳,容易造成无人机的倾倒,从而对旋翼造成损坏,进而造成财产的损失。
技术实现思路
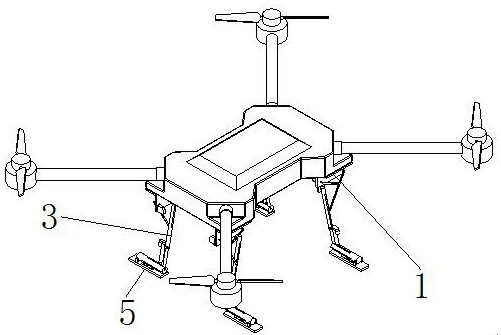
1、为实现上述目的,本发明提供如下技术方案:一种多旋翼无人机起落架,包括:三角安装板;
2、所述三角安装板上开设有安装孔,所述安装孔可以通过螺栓固定在多旋翼无人机的底部的四个边角上,所述三角安装板底部设置有支撑架,所述三角安装板与支撑架之间安装有死角支撑伸缩机构,所述死角支撑伸缩机构,包括死点支撑组件,所述死点支撑组件安装在三角安装板上,所述死点支撑组件与支撑架、三角安装板之间连接有折叠组件,所述折叠组件与支撑架之间连接有伸缩组件,所述死角支撑伸缩机构底端设置有支撑杆,所述死角支撑伸缩机构与支撑杆之间安装有调节机构,所述调节机构,包括:高度调节组件,所述高度调节组件安装在支撑架与伸缩组件之间,所述高度调节组件底部安装有平稳度调节组件。
3、通过采用上述技术方案,死角支撑伸缩机构可以起到对多旋翼无人机起落架更加稳定降落的作用,调节机构可以起到多旋翼无人机起落架根据不平整地面进行调整的作用。
4、作为本发明的一种优选方案,所述死点支撑组件,包括:第一马达,所述第一马达安装在三角安装板的背面,所述第一马达与三角安装板之间连接有第一旋转杆,所述三角安装板与第一旋转杆之间构成旋转结构;
5、所述第一旋转杆的端部固定连接有第一连动杆,所述第一连动杆的端部转动第一转轴;
6、所述第一转轴的侧面转动连接有第二连动杆,所述第二连动杆与第一连动杆之间通过第一转轴构成旋转结构,所述第二连动杆的端部转动连接有转动柱。
7、通过采用上述技术方案,第一马达可以起到拉动第一连动杆与第二连动杆转动的作用。
8、作为本发明的一种优选方案,所述折叠组件,包括:第二旋转杆,所述第二旋转杆固定连接在三角安装板的表面,所述第二旋转杆的端部转动连接有第三连动杆,所述第二旋转杆与第三连动杆之间构成旋转结构;
9、所述第三连动杆与第二连动杆之间转动连接有转动柱,所述第三连动杆与第二连动杆之间通过转动柱构成旋转结构;
10、所述第三连动杆的端部转动连接有第一内螺纹滑块,所述第一内螺纹滑块与第三连动杆之间构成旋转结构,所述三角安装板底部固定连接有固定板。
11、通过采用上述技术方案,第三连动杆可以起到带动支撑架展开折叠的作用。
12、作为本发明的一种优选方案,所述固定板的表面连接有第二转轴,所述第二转轴侧面转动连接有支撑架,所述支撑架与固定板之间通过第二转轴构成旋转结构;
13、所述支撑架表面开设有第一滑槽,所述第一滑槽内部活动连接有第一内螺纹滑块,所述第一滑槽与第一内螺纹滑块之间为滑动连接。
14、通过采用上述技术方案,第二转轴可以起到带动支撑架旋转的作用。
15、作为本发明的一种优选方案,所述伸缩组件,包括:第一轴承,所述第一轴承连接在第一滑槽的顶端,所述支撑架的底端开设有收藏槽;
16、所述收藏槽内侧贯穿开设有限位槽,所述收藏槽与第一滑槽之间连接有第二轴承;
17、所述第二轴承与第一轴承之间贯穿转动连接有第一丝杆,所述第一丝杆与收藏槽、第一滑槽之间通过第一轴承与第二轴承构成旋转结构;
18、所述第一丝杆侧面螺纹连接有第一内螺纹滑块,所述第一丝杆与第一内螺纹滑块之间为螺纹连接。
19、通过采用上述技术方案,第一内螺纹滑块可以起到带动第一丝杆转动的作用。
20、作为本发明的一种优选方案,所述第一丝杆侧面螺纹连接有伸展杆,所述伸展杆与第一丝杆之间为螺纹连接,所述伸展杆活动连接在收藏槽的内部;
21、所述伸展杆的端部固定连接有限位块,所述限位块活动连接在限位槽的内部,所述限位块与限位槽之间为滑动连接;
22、所述限位块侧面固定连接有连接环,所述连接环侧面套接在支撑架的侧面,所述连接环与支撑架之间为滑动连接。
23、通过采用上述技术方案,伸展杆可以起到调节支撑架高度的作用。
24、作为本发明的一种优选方案,所述高度调节组件,包括:激光测距仪,所述激光测距仪安装连接在三角安装板的背部,所述旋转块连接在连接环侧面;
25、所述旋转块侧面连接有第三转轴,所述连接环与第三转轴之间通过旋转块旋转结构,所述第三转轴侧面转动安装有电动伸缩杆;
26、所述旋转块与电动伸缩杆之间通过第三转轴构成旋转结构,所述电动伸缩杆与激光测距仪之间通过电线连接。
27、通过采用上述技术方案,激光测距仪可以起到测量地面与无人机之间高度的作用,电动伸缩杆可以起到调节支撑杆角度的作用。
28、作为本发明的一种优选方案,所述电动伸缩杆底端连接有第四转轴,所述第四转轴侧面转动连接有滑块,所述电动伸缩杆与滑块之间通过第四转轴构成旋转结构;
29、所述滑块活动连接在第二滑槽,所述第二滑槽开设在支撑杆的表面,所述滑块与第二滑槽之间为滑动连接;
30、所述支撑杆表面转动连接有第五转轴,所述第五转轴转动连接在伸展杆的底端,所述伸展杆与支撑杆之间通过第五转轴构成旋转结构。
31、通过采用上述技术方案,滑块可以起到推动支撑杆转动的作用。
32、作为本发明的一种优选方案,所述平稳度调节组件,包括:滑动槽,所述滑动槽开设在支撑杆的表面,所述滑动槽内部安装有第二马达;
33、所述第二马达与滑动槽之间转动连接有第二丝杆,所述滑动槽与第二丝杆之间构成旋转结构;
34、所述第二丝杆表面螺纹连接有第二内螺纹滑块,所述第二丝杆与第二内螺纹滑块之间为螺纹连接;
35、所述第二内螺纹滑块侧面活动连接在滑动槽的内部,所述第二内螺纹滑块底部连接有第六转轴;
36、所述第六转轴侧面转动连接有推杆,所述第二内螺纹滑块与推杆之间通过第六转轴构成旋转结构,所述推杆的端部转动连接有第七转轴。
37、通过采用上述技术方案,第二马达可以起到带动第二丝杆转动的驱动力,推杆可以起到推动支撑板转动的作用。
38、作为本发明的一种优选方案,所述第七转轴侧面固定连接有底托,所述底托与推杆之间通过第七转轴构成旋转结构;
39、所述底托表面弧形面与支撑杆表面的弧形面相吻合,所述底托底部固定连接有支撑板;
40、所述支撑板表面开设有安装槽,所述安装槽内部安装有倾角传感器;
41、所述倾角传感器与第二马达之间通过电线连接,所述支撑板上固定连接有固定块;
42、所述固定块之间设置有支撑杆,所述支撑杆与固定块之间转动连接有第三旋转杆;
43、所述支撑杆与固定块之间通过第三旋转杆构成旋转结构,所述支撑杆关于第三旋转杆的中心对称设置有两组。
44、通过采用上述技术方案,倾角传感器可以起到启动第二马达工作的作用。
45、与现有技术相比,本发明的有益效果是:该多旋翼无人机起落架,第二内螺纹滑块螺纹滑动时可以通过第六转轴、推杆与第七转轴调节支撑板的角度,从而使支撑板始终保持水平,进而可以使起落架与地面接触时所受到的压力都是相同的,方便多旋翼无人机起落架可以根据地面的平整度进行调节,使多旋翼无人机起落架在不平整的地面也可以进行稳定降落,第一连动杆、第一转轴与第二连动杆展开后可以与第三连动杆呈直角,从而形成死角结构,方面使无人机在降落时更加的稳定。
46、1.当多旋翼无人机在降落时,激光测距仪可以通过激光对地面与无人机四个边角的高度进行测量,从而得出地面是否平整,当地面不平整时,可以启动电动伸缩杆进行工作,电动伸缩杆工作时可以通过第四转轴、滑块与第五转轴调节支撑杆的角度,从而可以使支撑杆端部的高度进行调节,支撑杆角度调节时会对支撑板的角度进行调节,支撑板角度受到调节时倾角传感器会检测到所调节的角度,从而启动第二马达进行工作,第二马达工作时可以通过第二丝杆带动第二内螺纹滑块进行螺纹滑动,第二内螺纹滑块螺纹滑动时可以通过第六转轴、推杆与第七转轴调节支撑板的角度,从而使支撑板始终保持水平,进而可以使起落架与地面接触时所受到的压力都是相同的,方便多旋翼无人机起落架可以根据地面的平整度进行调节,使多旋翼无人机起落架在不平整的地面也可以进行稳定降落;
47、2.当多旋翼无人机起落架在将降落时,可以启动第一马达进行工作,第一马达工作时可以带动第一旋转杆、第一连动杆、第一转轴、第二连动杆与转动柱进行转动移动,转动柱移动时可以推动第三连动杆进行转动,第三连动杆转动时可以带动第一内螺纹滑块进行移动,第一内螺纹滑块移动时可以带动支撑架进行旋转,第一内螺纹滑块移动的同时可以通过第一丝杆进行螺纹滑动,第一内螺纹滑块螺纹滑动时可以带动第一丝杆进行转动,第一丝杆转动时可以带动伸展杆进行螺纹滑动,伸展杆螺纹滑动时可以带动支撑杆进行移动,当第一内螺纹滑块螺纹滑动到第一滑槽底端时可以将第一连动杆、第一转轴与第二连动杆完全展开,第一连动杆、第一转轴与第二连动杆展开后可以与第三连动杆呈直角,从而形成死角结构,方面使无人机在降落时更加的稳定。
本文地址:https://www.jishuxx.com/zhuanli/20240722/219622.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表