一种折叠多旋翼无人机的制作方法
- 国知局
- 2024-08-01 05:31:42
本技术属于飞行器,具体涉及一种折叠多旋翼无人机。
背景技术:
1、随着无人机技术的飞速发展,无人机在各领域的地位日益突显,特别是多旋翼无人机,其随时随地起降的优势是其他类型无人机无法比拟的。
2、目前,常规多旋翼体积大,即使的折叠后,其依然携带不便;共轴双旋翼具有较小的体积,但其结构复杂,技术难度要求较高,在一定程度上影响其可靠性。比如:共轴双旋翼无人机(公开号cn115535228a,申请日2022.11.01)中提出了一种采用双电机的共轴双旋翼无人机,上下旋翼分别通过上下两个电机驱动,并且下旋翼组件可进行周期变距操控,相比传统直升机的共轴双桨结构已经简化了结构,但其机构依然复杂,并且变距机构加工精度和装配精度要求较高;折叠式四旋翼无人机(公开号cn116252978a,申请日2023.04.17)中提出了一种折叠方案,其四个机臂均在同一水平面上,故为了折叠后动力系统不发生干涉,安装机臂的中心盘直径较大,不适用折叠后直径要求较小的无人机。因此需要开发结构简单、体积小的多旋翼来满足各领域的需求。
技术实现思路
1、本实用新型提供了一种折叠多旋翼无人机,所述无人机为旋翼桨盘垂直交错式的四旋翼无人机,能够兼顾多旋翼的简单可靠和共轴双旋翼的小尺寸约束。
2、为实现以上目的,本实用新型采用以下技术方案:
3、一种折叠多旋翼无人机,在无人机机身表面布置四个旋翼,其中两两旋翼对角线垂直方向错开,从而避免四个旋翼在同一水平上折叠收纳时发生干涉,展开后对角线旋翼桨盘分别在两个不同的水平面上;
4、或者对角旋翼长度相等,相邻旋翼长度不同,从而实现旋翼桨盘在同一水平面上错位布置,在折叠收纳后电机得以错位布置而不发生干涉;
5、每个旋翼的末端安装旋翼动力系统;
6、所述无人机的机身上设置用于旋翼和旋翼动力系统折叠时的下陷区域;
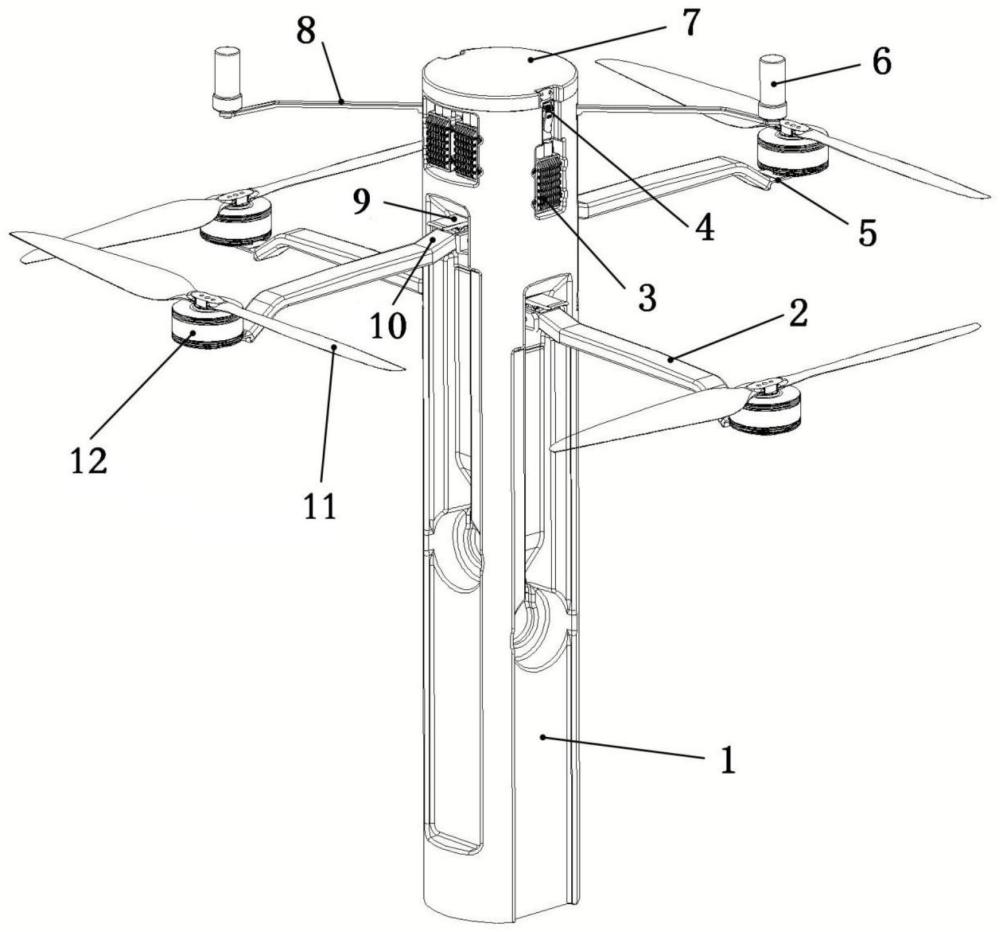
7、所述机身包括机体外壳1、舱盖快拆锁4、电池舱盖7、gps天线安装支架8;机体外壳1的顶部安装电池舱盖7,舱盖快拆锁4固定于电池舱盖上用于锁紧电池舱盖7,电池布置在机身顶部,通过电池舱盖7快拆实现电池的快速更换;
8、每个旋翼都包括旋翼机臂2、机臂折叠锁9、机臂转轴座10、机臂转轴13、机臂安装盘14,旋翼机臂2的一端通过机臂转轴座10 与机臂折叠锁9连接,机臂折叠锁通过机臂转轴13安装于机臂安装盘14上,机臂安装盘14安装在机体内部,对应外壳内线处局部开口;对角线的两个旋翼机臂安装在同一个机臂安装盘上,但两个旋翼机臂为相互独立,收纳时旋翼机臂2通过机臂转轴13往下折叠,旋翼机臂2展开后通过机臂折叠锁9进行锁定;
9、机臂折叠锁9包括锁盖91、铆钉92、锁舌93,锁盖91和锁舌93通过铆钉92连接,锁盖91与机臂安装盘14连接,机臂折叠锁9的锁座集成在机臂转轴座10上;
10、所述旋翼动力系统包括电子调速器3、旋翼电机12、螺旋桨11、电机安装座5;旋翼机臂2的另一端连接电机安装座5,旋翼电机12安装在电机安装座5上,螺旋桨11安装于旋翼电机12上;电子调速器3安装于机体外壳1侧面电池舱盖7的下方,在大油门下或持续飞行时,电子调速器3会发热严重,需要其散热片外露,为了对电子调速器有效散热,在机体外壳1侧面设置了下陷区域用于安装电子调速器3,与旋翼电机通过线缆连接(三相线),电子调速器3用于接受飞控或遥控器的信号,来控制电机的启动、停止和转速;电子调速器3安装位置下方设置旋翼和旋翼动力系统在折叠时的下陷区域;
11、gps天线安装支架8安装于旋翼上方,可往下折叠收纳,gps天线6安装于gps天线安装支架8一端;gps天线位于旋翼桨盘之上,可有效避免碳纤维螺旋桨在旋转时对gps信号干扰;
12、旋翼机臂2为矩形截面空心异型碳纤维管,内部电机线缆可以穿过,两端分别胶接电机安装座5和机臂转轴座10;电子调速器3安装在机体外壳1上;
13、上述结构适用于长圆筒包络外形的无人机。
14、有益效果:本实用新型提供了一种折叠多旋翼无人机,无人机机身表面布置四个旋翼,其中两两旋翼对角线垂直方向错开,从而避免四个旋翼在同一水平上折叠收纳时发生干涉,展开后对角线旋翼桨盘分别在两个不同的水平面上;或者对角旋翼长度相等,相邻旋翼长度不同,从而实现旋翼桨盘在同一水平面上错位布置,在折叠收纳后电机得以错位布置而不发生干涉;本实用新型通过合理设计机体主体结构和机臂展开、折叠结构形式,可以兼顾多旋翼的简单可靠和共轴双旋翼的小尺寸约束,大幅度减小收纳尺寸,满足包络尺寸约束要求,并且可实现旋翼巡飞弹的筒式发射。
技术特征:1.一种折叠多旋翼无人机,其特征在于,在无人机机身表面布置四个旋翼,其中两两旋翼对角线垂直方向错开,从而避免四个旋翼在同一水平上折叠收纳时发生干涉,展开后对角线旋翼桨盘分别在两个不同的水平面上;
2.根据权利要求1所述的折叠多旋翼无人机,其特征在于,每个旋翼的末端安装旋翼动力系统;所述无人机的机身上设置用于旋翼和旋翼动力系统折叠时的下陷区域。
3.根据权利要求1或2所述的折叠多旋翼无人机,其特征在于,所述机身包括机体外壳(1)、舱盖快拆锁(4)、电池舱盖(7);机体外壳(1)的顶部安装电池舱盖(7),舱盖快拆锁(4)固定于电池舱盖(7)上用于锁紧电池舱盖(7),电池布置在机身顶部,通过电池舱盖(7)快拆实现电池的快速更换。
4.根据权利要求2所述的折叠多旋翼无人机,其特征在于,每个旋翼都包括旋翼机臂(2)、机臂折叠锁(9)、机臂转轴座(10)、机臂转轴(13)、机臂安装盘(14);旋翼机臂(2)的一端通过机臂转轴座(10)与机臂折叠锁(9)连接,机臂折叠锁(9)通过机臂转轴(13)安装于机臂安装盘(14)上,机臂安装盘(14)安装在机体内部,对应外壳内线处局部开口收纳时,旋翼机臂(2)通过机臂转轴(13)往下折叠,旋翼机臂(2)展开后通过机臂折叠锁(9)进行锁定。
5.根据权利要求4所述的折叠多旋翼无人机,其特征在于,机臂折叠锁(9)包括锁盖(91)、铆钉(92)、锁舌(93);锁盖(91)和锁舌(93)通过铆钉(92)连接,锁盖(91)与机臂安装盘(14)连接,机臂折叠锁(9)的锁座集成在机臂转轴座(10)上。
6.根据权利要求4所述的折叠多旋翼无人机,其特征在于,对角线的两个旋翼机臂(2)安装在同一个机臂安装盘(14)上,两个旋翼机臂(2)相互独立。
7.根据权利要求4所述的折叠多旋翼无人机,其特征在于,所述旋翼动力系统包括电子调速器(3)、旋翼电机(12)、螺旋桨(11)、电机安装座(5);电子调速器(3)安装于机身表面,与旋翼电机(12)通过线缆连接;旋翼机臂(2)的末端连接电机安装座(5),旋翼电机(12)安装在电机安装座(5)上,螺旋桨(11)安装于旋翼电机(12)上。
8.根据权利要求7所述的折叠多旋翼无人机,其特征在于,所述机身侧面设置了下陷区域用于安装电子调速器(3)。
9.根据权利要求6所述的折叠多旋翼无人机,其特征在于,所述无人机包括gps天线,gps天线(6)通过gps天线安装支架(8)安装于旋翼上方。
10.根据权利要求6所述的折叠多旋翼无人机,其特征在于,旋翼机臂(2)为矩形截面空心异型碳纤维管,内部电机线缆可穿过。
技术总结本技术公开了一种折叠多旋翼无人机,属于飞行器技术领域,提出了旋翼桨盘垂直交错式的四旋翼无人机,可以兼顾多旋翼的简单可靠和共轴双旋翼的小尺寸约束。本技术通过在无人机机身表面布置四个旋翼,其中两两旋翼对角线垂直方向错开,从而避免四个旋翼在同一水平上折叠收纳时发生干涉,展开后对角线旋翼桨盘分别在两个不同的水平面上;或者对角旋翼长度相等,相邻旋翼长度不同,从而实现旋翼桨盘在同一水平面上错位布置,在折叠收纳后电机得以错位布置而不发生干涉。技术研发人员:白亚磊,杨博宁,李超杰,陈益良受保护的技术使用者:南京智道航空科技有限公司技术研发日:20230830技术公布日:2024/5/6本文地址:https://www.jishuxx.com/zhuanli/20240722/220190.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。