一种双电机驱动的仿蝴蝶扑翼飞行器
- 国知局
- 2024-08-01 05:44:22
本发明涉及昆虫仿生技术及空气动力学领域,具体涉及一种双电机驱动的仿蝴蝶扑翼飞行器。
背景技术:
1、蝴蝶是节肢动物门下鳞翅目的昆虫,具有高超的飞行能力。蝴蝶与其他扑翼飞行的动物相比,具有翼展弦比较小(甚至小于1)、扇翅幅度较大、频率较低(平均11hz左右)且伴随着翼和身体运动的高度耦合特点。因此,基于这些特点研究的仿蝴蝶飞行机器人具有飞行效率高、机动性强、易于隐蔽等优点,被广泛应用。但是,蝴蝶的飞行具有非定常、不稳定等特点,且其飞行机理较为复杂。飞行是仿生学习网络中反复出现的主题。为了尽可能接近其自然界原型的飞行,仿蝴蝶扑翼飞行器搭载了高度集成的电子设备。它可以单独精确地控制翅膀,从而实现快速运动。由于翅膀稍微重叠,所以在拍打的过程中它们之间会产生一个空气间隙,这赋予了其特殊的空气动力学特性。
2、目前,仿蝴蝶扑翼飞行器还没有一套成熟的驱动方案,现有的仿蝴蝶扑翼飞行器在驱动上大多采用单电机扑翼机构型或双舵机构型。单电机驱动通过齿轮组和连杆实现单个电机同时驱动双翼对称扑动,需要加装尾翼以改变飞行运动方向,此举牺牲了仿蝴蝶扑翼飞行器的仿生性;而采取双舵机驱动则受限于微型舵机扭矩过小,从而导致小翼展仿蝴蝶扑翼飞行器获取升力不足的问题。
3、因此,有必要设计一种新的仿蝴蝶扑翼飞行器的驱动结构以解决上述问题。
技术实现思路
1、本发明的目的在于提供一种新的仿蝴蝶扑翼飞行器的设计方案,用以解决现有技术中仿蝴蝶扑翼飞行器仿生程度低、获取升力不足的问题。
2、为了解决上述技术问题,本发明是通过以下技术方案实现的:
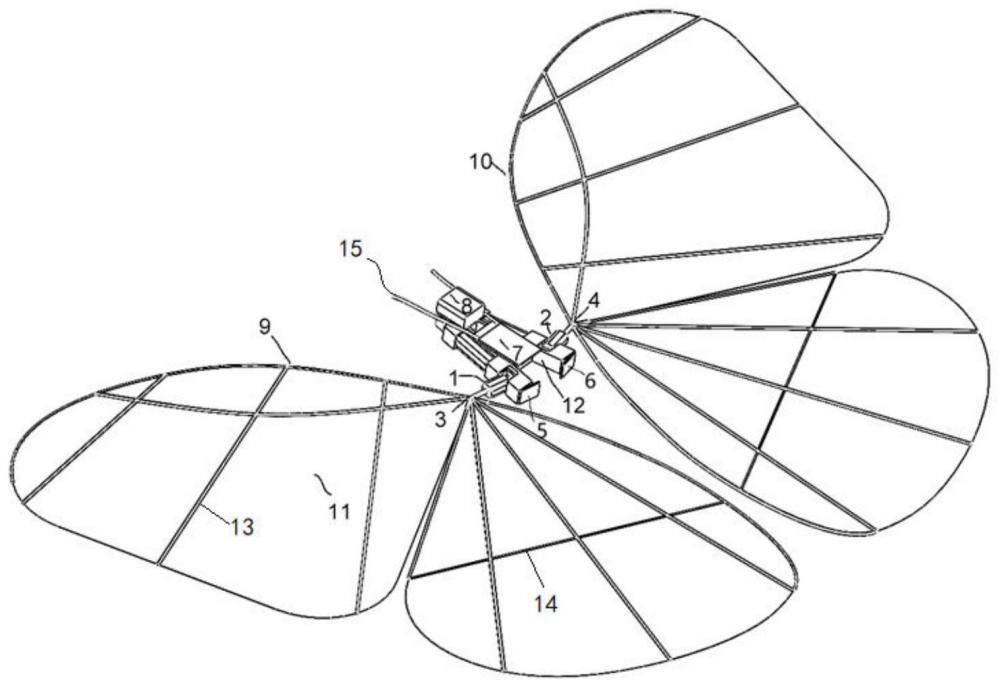
3、一种双电机驱动的仿蝴蝶扑翼飞行器,包括翅膀组件和驱动组件,翅膀组件有两组,镜像对称的设置在驱动组件的左右两侧上,每组翅膀组件均包括前翅膀与后翅膀,前翅膀和后翅膀均包括外围主支架和分支架,所述分支架仿照蝴蝶主要血管网排布在外围主支架内,所述外围主支架和分支架上均覆有pet材质的翼膜,所述驱动组件包括电机支架、飞行控制电路板、微型电机及电机驱动模块,所述飞行控制电路板有一块,安装在电机支架上;所述微型电机有两个,对称的安装在所述电机支架的左右两侧上;所述电机驱动模块也有两块,与微型电机相一一对应,两块电机驱动模块安装在电机支架的后端部上,飞行控制电路板、微型电机分别与电机驱动模块电连接,所述飞行器还包括3d打印连接件,所述3d打印连接件用于将微型电机与与其同侧的翅膀组件进行连接。
4、作为一种具体的实施方式,所述外围主支架、分支架均采用了碳纤维材料制成。
5、作为一种具体的实施方式,所述3d打印连接件采用了pla材质或尼龙材质制成。
6、作为一种具体的实施方式,所述飞行器控制板与电机驱动模块间、微型电机与电机驱动模块间均通过杜邦线进行连接。
7、作为一种具体的实施方式,所述翼膜通过406速干胶或ab树脂胶粘贴在外围主支架和分支架上。
8、作为一种具体的实施方式,前翅膀和后翅膀上的分支架均包括一横向脉和若干纵向脉,前翅膀上的横向脉靠近前翅膀的前端且呈向后弯曲的弧形;后翅膀上的横向脉位于后翅膀的中后部上,由远离电机支架的一端向靠近电机支架的一端向后倾斜,后翅膀上的横向脉呈直线形。
9、作为一种具体的实施方式,所述电机支架的前端还安装有电池,用于向微型电机进行供电。
10、作为一种具体的实施方式,所述飞行控制电路板上集成有角度传感器,用于采集两个微型电机的转动角度数据。
11、作为一种具体的实施方式,当飞行器放置在水平面上时,电机支架所在的平面和水平面间具有一夹角,所述夹角角度控制在28°-35°之间。
12、与现有技术相比,本发明的有益之处是:
13、1)本发明的双电机驱动的仿蝴蝶扑翼飞行器,其采用的驱动结构为双电机结构,能够提高仿生飞行器的升力,通过一对角度传感器收集实时飞行数据,发送ppm信号给飞行控制电路板,控制板再对应角度通过电机驱动模块控制电机正反转,实现飞行器的稳定扑翼飞行;
14、2)本发明中,采用的外围主支架和分支架均采用了碳纤维材料,同时按照蝴蝶主要血管网排布减小了翅膀运动时产生的意外形变,以提升飞行效率。
技术特征:1.一种双电机驱动的仿蝴蝶扑翼飞行器,包括翅膀组件和驱动组件,翅膀组件有两组,镜像对称的设置在驱动组件的左右两侧上,其特征在于,每组翅膀组件均包括前翅膀与后翅膀,前翅膀和后翅膀均包括外围主支架和分支架,所述分支架仿照蝴蝶主要血管网排布在外围主支架内,所述外围主支架和分支架上均覆有pet材质的翼膜,所述驱动组件包括电机支架、飞行控制电路板、微型电机及电机驱动模块,所述飞行控制电路板有一块,安装在电机支架上;所述微型电机有两个,对称的安装在所述电机支架的左右两侧上;所述电机驱动模块也有两块,与微型电机相一一对应,两块电机驱动模块安装在电机支架的后端部上,飞行控制电路板、微型电机分别与电机驱动模块电连接,所述飞行器还包括3d打印连接件,所述3d打印连接件用于将微型电机与与其同侧的翅膀组件进行连接。
2.根据权利要求1所述的双电机驱动的仿蝴蝶扑翼飞行器,其特征在于,所述外围主支架、分支架均采用了碳纤维材料制成。
3.根据权利要求1所述的双电机驱动的仿蝴蝶扑翼飞行器,其特征在于,所述3d打印连接件采用了pla材质或尼龙材质制成。
4.根据权利要求1所述的双电机驱动的仿蝴蝶扑翼飞行器,其特征在于,所述飞行器控制板与电机驱动模块间、微型电机与电机驱动模块间均通过杜邦线进行连接。
5.根据权利要求1所述的双电机驱动的仿蝴蝶扑翼飞行器,其特征在于,所述翼膜通过406速干胶或ab树脂胶粘贴在外围主支架和分支架上。
6.根据权利要求1所述的双电机驱动的仿蝴蝶扑翼飞行器,其特征在于,前翅膀和后翅膀上的分支架均包括一横向脉和若干纵向脉,前翅膀上的横向脉靠近前翅膀的前端且呈向后弯曲的弧形;后翅膀上的横向脉位于后翅膀的中后部上,由远离电机支架的一端向靠近电机支架的一端向后倾斜,后翅膀上的横向脉呈直线形。
7.根据权利要求1所述的双电机驱动的仿蝴蝶扑翼飞行器,其特征在于,所述电机支架的前端还安装有电池,用于向微型电机进行供电。
8.根据权利要求1所述的双电机驱动的仿蝴蝶扑翼飞行器,其特征在于,所述飞行控制电路板上集成有角度传感器,用于采集两个微型电机的转动角度数据。
9.根据权利要求1至8中任一权利要求所述的双电机驱动的仿蝴蝶扑翼飞行器,其特征在于,两个所述微型电机安装在电机支架的左右两侧的末端。
10.根据权利要求9所述的双电机驱动的仿蝴蝶扑翼飞行器,其特征在于,当飞行器放置在水平面上时,电机支架所在的平面和水平面间具有一夹角,所述夹角角度控制在28°-35°之间。
技术总结本发明公开了一种双电机驱动的仿蝴蝶扑翼飞行器,包括翅膀组件和驱动组件,翅膀组件有两组,镜像对称的设置在驱动组件的左右两侧上,每组翅膀组件均包括前翅膀与后翅膀,前翅膀和后翅膀均包括外围主支架和分支架,分支架仿照蝴蝶主要血管网排布在外围主支架内,外围主支架和分支架上均覆有PET材质的翼膜,驱动组件包括电机支架、飞行控制电路板、微型电机及电机驱动模块,飞行器还包括3D打印连接件,3D打印连接件用于将微型电机与与其同侧的翅膀组件进行连接。本发明的飞行器解决了现有技术中小翼展仿蝴蝶扑翼机产生升力不足且不稳定的问题。技术研发人员:范纪华,金炳梁,王书恒,王家豪,王剑豪,吕增城,余福硕,沈骁,王鸿飞,王宝晖受保护的技术使用者:张家港江苏科技大学产业技术研究院技术研发日:技术公布日:2024/5/27本文地址:https://www.jishuxx.com/zhuanli/20240722/221158.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表