一种用于三维建模的高精度智能无人机测绘设备的制作方法
- 国知局
- 2024-08-01 05:47:58
本发明涉及无人机,特别涉及一种用于三维建模的高精度智能无人机测绘设备。
背景技术:
1、随着无人机技术的不断发展,无人机测绘测量在遥感测绘中占有非常重要的作用。由于无人机具备成本低、效费比好、机动性能好、使用方便等诸多优点,目前在航拍、农业、植保、自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄等领域得到广泛应用。
2、目前,在测绘地理信息行业中,多旋翼无人机广泛运用,现有的测绘无人机常使用人工更换回收镜头的方式进行测绘拍摄,在测绘过程中,由于拍摄镜头和激光模块受到高空空气中的灰尘和污染物影响,使测绘镜头和激光模块容易受到遮挡,影响测绘数据的收集,不方便后期地形三维建模的验证,需要人工降落到起飞点手动擦除灰尘和污染物,容易造成测绘准确度低,浪费测绘操作时间,容易错过最佳测绘记录时间,影响测绘效率,同时,在无人机降落时,直接降落容易造成无人机模块损坏,影响后期使用。
技术实现思路
1、针对现有技术存在的上述问题,本发明要解决的问题是在测绘过程中,拍摄镜头和激光模块受到高空空气中的灰尘和污染物影响,使测绘镜头和激光模块容易受到遮挡,需要人工降落到起飞点手动擦除灰尘和污染物,容易造成测绘准确度低,浪费测绘操作时间,容易错过最佳测绘记录时间,影响测绘效率,同时,在无人机降落时,直接降落容易造成无人机模块损坏,影响后期使用的问题。
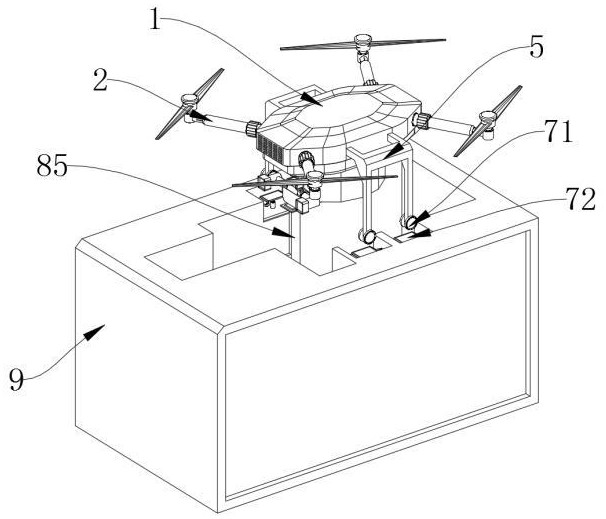
2、为解决上述提出的技术问题,本发明采用如下技术方案:一种用于三维建模的高精度智能无人机测绘设备,包括无人机本体和着陆平台,所述无人机本体上等角度分布安装有旋翼机臂,所述无人机本体的内侧安装有电池模块,所述无人机本体的前端侧壁上设置有通风口,所述无人机本体的两侧对称安装有起落支架,还包括有测绘组件,所述测绘组件安装在所述无人机本体的前端,所述测绘组件用于测绘建模数据进行收录,固定组件,所述固定组件安装在所述着陆平台上,所述固定组件用于对降落的无人机进行回收固定,更换组件,所述更换组件安装在所述着陆平台的内侧,所述更换组件用于对测绘组件进行更换。
3、可选地,所述旋翼机臂上设置有伸缩槽,所述电池模块上设置有金属散热鳍片,所述通风口位于电池模块的前侧设置,所述起落支架垂直于着陆平台的顶面安装,所述测绘组件垂直于无人机本体的底面安装。
4、可选地,所述测绘组件包括固定架,所述固定架安装在所述无人机本体的前端,所述固定架上卡接有卡接块,且卡接块与固定架阻尼连接,所述卡接块上安装有安装架,所述安装架上对称安装有摄像机模块,所述安装架上安装有激光模块。
5、可选地,所述固定架安装在通风口的下方,所述安装架垂直与卡接块安装,所述激光模块安装在摄像机模块之间,且激光模块位于两组摄像机模块之间的中心位置。
6、可选地,所述固定组件包括起落滑轮,所述起落滑轮转动安装在所述起落支架上,且起落滑轮在起落支架上等距分布,所述着陆平台内侧对称安装有触发板,且触发板等距分布,所述触发板的底部安装有弹性伸缩杆,所述弹性伸缩杆底部安装有减振板,所述减振板的底部设置有压力开关,所述压力开关安装在着陆平台的内侧,所述触发板的两侧对称设置有接触滚轮,且接触滚轮与触发板相互接触,所述接触滚轮的端部连接有连接杆一,所述连接杆一的尾端连接有弹簧,所述弹簧的尾端连接在着陆平台的内侧。
7、可选地,所述落滑轮使用橡胶材料,所述触发板与着陆平台相互平行设置安装,所述触发板的两侧设置为圆弧形,所述减振板使用橡胶材料,所述接触滚轮使用耐磨材料,所述连接杆一设置为y型,所述连接杆一平行于着陆平台的顶面设置安装。
8、可选地,所述更换组件包括安装架,所述安装架安装在所述着陆平台的内侧,所述安装架上转动安装有接触套,所述接触套外侧等角度分布安装有接触杆,所述接触套的内侧滑动安装有滑动杆,所述滑动杆的底部连接有连接杆二,所述连接杆二的底部安装有更换爪,所述更换爪的两侧对称安装有安装吸盘,所述连接杆二上套设有套接环。
9、可选地,所述套接环上滑动连接有连接板,所述连接板的接触头滑动连接在曲柄的滑槽内,所述连接板转动安装在所述安装架二上,所述曲柄的端面连接有滑槽轮,且滑槽轮转动安装在安装架上,所述接触杆在滑槽轮的滑槽内啮合滑动,所述滑槽轮的输入端连接有电机,所述电机安装在安装架的外侧,所述电机与压力开关通过导线相互连接。
10、可选地,所述接触套的内侧设置有滑槽,所述滑动杆的截面为十字齿形,所述滑动杆使用耐磨材料,所述更换爪垂直于滑动杆设置安装,所述曲柄和滑槽轮在同一轴心上设置安装。
11、可选地,包括扫描采集单元、数字地图构建单元、数据滤波修正单元和地面管理终端,所述扫描采集单元用于对摄像机模块和激光模块测绘采集数据的传输和无人机导航控制,所述扫描采集单元包括测绘数据采集模块、飞行控制主板和实时交互通信模块,所述测绘数据采集模块用于对摄像机模块和激光模块实际地形的具体数据进行测绘,所述测绘数据采集模块包括测绘系统,所述测绘系统设置安装在无人机上,所述飞行控制主板用于控制无人机的飞行距离、速度和飞行角度,所述通信交互模块与所述测绘系统和所述飞行控制主板相连接用于与地面管理终端通信;
12、所述数字地图构建单元用于进行实时数据处理和成图构建,所述数字地图构建单元包括点云处理模块、三维建模重构模块和数据分析模块,所述三维建模重构模块根据三维点云数据生成高精度数字高程图,所述数据分析模块用于根据生成的高程图与采集到的环境数据分析,测绘生成地形特点特征并记录,所述数字地图构建单元与所述地面管理终端相连;
13、所述数据滤波修正单元用于对激光模块采集到的数据进行预处理,并通过与摄像机模块采集数据进行对比筛选修正,所述数据滤波修正单元包括数据预处理模块和误差校正模块,所述数据预处理模块用于对采集数据进行滤波预处理,所述误差校正模块用于根据数据误差校验模型对数据误差进行重组校正,确保测绘收录点云数据精度,所述数据滤波修正单元与所述数字地图构建单元相连;
14、所述地面管理终端用于将上行控制指令发送给所述扫描采集单元并接收所述扫描采集单元反馈的下行检测数据,所述地面管理终端包括智能显示模块、数据库存储模块、数据分类管理模块和无人机操控模块,所述数据库存储模块用于存储分析数据和采集数据信息记录,所述数据分类管理模块用于对不同测绘地点的地形数据进行分类管理。
15、相对于现有技术,本发明至少具有如下优点:
16、1、通过设置有更换组件,电机带动滑槽轮和曲柄进行转动,接触杆在滑槽轮上相互啮合,沿滑槽轮上滑槽进行滑动,从而使接触套转动,同时,曲柄转动使外侧滑槽内相接触的连接板跟随移动,使连接板在安装架内侧转动,使连接杆二带动滑动杆向更换爪方向移动,通过接触套转动的转动使更换爪进行转动,安装吸盘吸附在安装架上,使卡接块与固定架沿卡接弧面脱离,将使用后的激光模块和摄像机模块进行拆除,同时旋转后安装吸盘将新的激光模块和摄像机模块通过卡接块与固定架的卡接安装在无人机本体上,安装吸盘停止运作,无人机本体重新升空进行未完成的测绘,提高测绘的效率,防止错过最佳测绘记录时间,提高无人机测绘数据的准确度,防止高空中空气污染物损坏激光模块和摄像机模块,提高测绘设备的使用寿命。
17、2、通过设置有固定组件,无人机本体自身重力和下压气流影响,起落滑轮向下挤压触发板,使弹性伸缩杆受力挤压,触发板两侧圆弧面通过下压与两侧的接触滚轮相互接触,接触滚轮向后侧移动,弹簧受力压缩,通过与下移过程中的起落滑轮表面相互接触,缓慢复位,最终将起落滑轮接触固定在接触滚轮之间的下方,无人机本体下落受到的自身重力和下压气流产生的力通过弹性伸缩杆传递到底部减振板上,使振动力被削弱,防止降落时造成无人机模块损坏以及连接件松动,防止复飞时,造成安全隐患,降低不必要损耗。
本文地址:https://www.jishuxx.com/zhuanli/20240722/221488.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表