一种无人机吊装机器人用自动取放机构的制作方法
- 国知局
- 2024-08-01 05:51:33
本发明涉及无人机运载机器人,特别是对应高空、超视野外、设备无电状态下和不适合人员到达环境下辅助吊装运输自动取放装置,尤其涉及一种无人机吊装机器人用自动取放机构。
背景技术:
1、光伏电站的光伏板安装高度距离地面超过了8米,且光伏板周围环境不适合运输设备运行,光伏板常年累积灰尘会影响发电效率,人工清洗效率慢、成本高、高空危险和踩踏对光伏板存在损坏风险,因此使用无人机吊装光伏清洗机器人运输到光伏板上面进行清洗作业,作业完成后操作无人机将高空光伏板上的清洗机器人回收维护,目前市面上无人机吊装运输投放时是可以实现自动投放的,但是开始吊装取货时都是需要人工将货物放在挂钩上才能完成起吊,在这种情况下得到了辅助吊装运输自动取放装置。
2、中国专利公告号cn 209410332 u公开了一种在无人机底部搭载机器人的吊装机构,包括设置在无人机底部的吊索、以及设置机器人上的吊装孔,无人机上设置有用于带动吊索升降的驱动单元,吊索的底部设置有一可插入吊装孔的插接部,该插接部上设置有一挂钩,该挂钩可收缩于插接部内,吊装孔的底部边缘形成一挂接部,当插接部插入到吊装孔内时,挂钩与挂接部配合组成一个将插接部与挂接部挂接在一起的连接机构。该技术方案仅需要一个吊索即可完成机器人的快速回收与投放,简化了结构,并且降低了无人机的负载。但是,申请人发现,在该技术方案中,通过在吊索的底部的插接部自上至下插入到吊装孔中,由于吊装孔和插接部尺寸都并不大,并且在插接后需要启动微型电机把挂钩打开才可实现机器人的吊装工作,因此插接过程耗费大量时间。
技术实现思路
1、本发明要解决的技术问题是克服现有技术的不足,提供一种对接时间短的无人机吊装机器人用自动取放机构。
2、为解决上述技术问题,本发明采用以下技术方案:
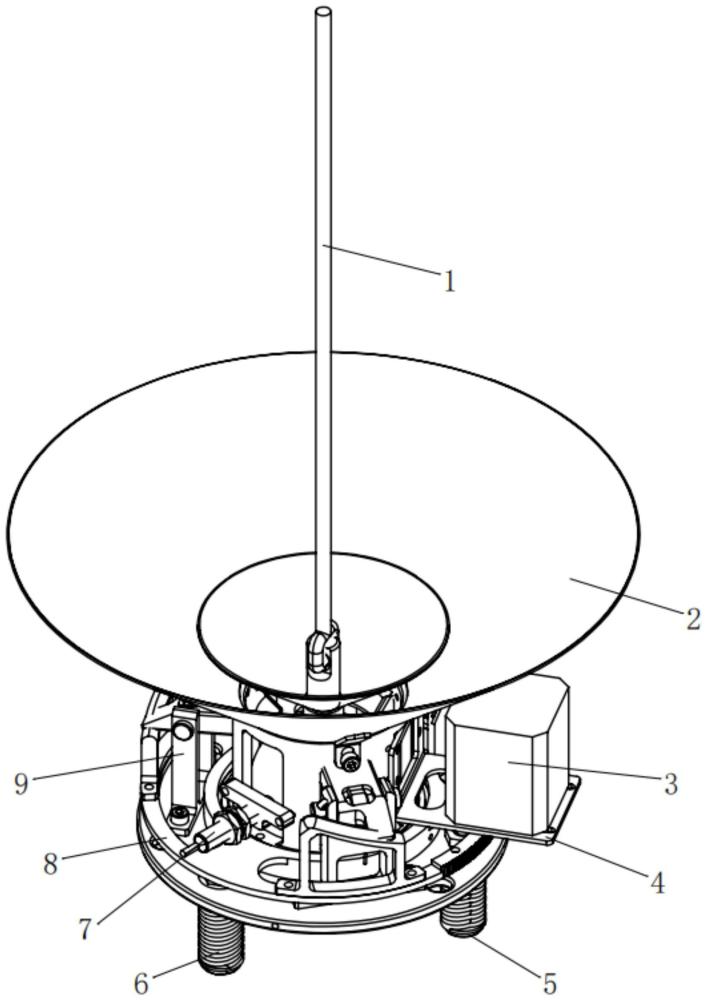
3、一种无人机吊装机器人用自动取放机构,包括连接在无人机上的吊球组件以及连接在机器人上的本体组件和开关组件,所述开关组件连接于本体组件上,所述吊球组件包括吊绳和连接在吊绳下部的重力球;所述本体组件包括第一漏斗和用于容纳重力球的第一安装座,在所述第一安装座顶部设有开口,所述第一漏斗设置于开口上,所述开关组件用于当重力球自第一漏斗进入第一安装座内后将重力球锁定在第一安装座内。
4、作为上述技术方案的进一步改进:
5、在所述第一安装座侧壁设有活动孔,所述开关组件包括支撑座和活动块,所述支撑座与第一安装座连接,所述活动块连接在支撑座上且相对于支撑座可旋转,所述活动块一端位于第一安装座外,另一端穿过活动孔延伸至第一安装座内,所述活动块在重力球的重力作用下向下旋转以便于重力球进入至第一安装座内。
6、所述开关组件还包括旋转轴和扭簧,所述活动块通过旋转轴连接在支撑座上,所述扭簧套设在旋转轴上且用于复位活动块。
7、所述开关组件还包括开口销,所述开口销插设在旋转轴两端以避免旋转轴从支撑座上脱落。
8、所述本体组件还包括底座,所述支撑座和第一安装座安装在底座上。
9、所述自动取放机构还包括转盘组件,所述转盘组件包括转盘和位于转盘外圆周的凸轮,所述转盘设置在底座上且相对于底座可旋转,所述转盘旋转使所述凸轮位于活动块下方以驱动活动块旋转。
10、所述凸轮和活动块一一对应设置。
11、所述自动取放机构还包括驱动组件,所述驱动组件包括驱动件和齿轮,所述转盘上设有齿条,所述齿条和齿轮相配合,所述驱动件驱动齿轮旋转。
12、所述吊球组件包括第二漏斗,所述第二漏斗连接于吊绳上且位于重力球上方。
13、所述自动取放机构还包括感应器组件和控制器,所述感应器组件用于感应重力球是否已进入第一安装座内,所述控制器和感应器组件无线连接。
14、与现有技术相比,本发明的优点在于:
15、本发明的一种无人机吊装机器人用自动取放机构包括连接在无人机上的吊球组件以及连接在机器人上的本体组件和开关组件,本体组件和开关组件是安装在机器人设备上,用来捕获无人机放下来的吊球组件,取消了悬吊吊钩,吊绳让无人机在远离地面安全高度可以悬吊物品,在对接时只需要操作重力球进入第一漏斗范围内,重力球能快速导向滑入第一漏斗中完成对接,开关组件锁定重力球即可实现对接,对接时间短。
技术特征:1.一种无人机吊装机器人用自动取放机构,其特征在于:包括连接在无人机上的吊球组件(1)以及连接在机器人上的本体组件(2)和开关组件(9),所述开关组件(9)连接于本体组件(2)上,所述吊球组件(1)包括吊绳(11)和连接在吊绳(11)下部的重力球(13);所述本体组件(2)包括第一漏斗(21)和用于容纳重力球(13)的第一安装座(22),在所述第一安装座(22)顶部设有开口(221),所述第一漏斗(21)设置于开口(221)上,所述开关组件(9)用于当重力球(13)自第一漏斗(21)进入第一安装座(22)内后将重力球(13)锁定在第一安装座(22)内。
2.根据权利要求1所述的自动取放机构,其特征在于:在所述第一安装座(22)侧壁设有活动孔(223),所述开关组件(9)包括支撑座(93)和活动块(91),所述支撑座(93)与第一安装座(22)连接,所述活动块(91)连接在支撑座(93)上且相对于支撑座(93)可旋转,所述活动块(91)一端位于第一安装座(22)外,另一端穿过活动孔(223)延伸至第一安装座(22)内,所述活动块(91)在重力球(13)的重力作用下向下旋转以便于重力球(13)进入至第一安装座(22)内。
3.根据权利要求2所述的自动取放机构,其特征在于:所述开关组件(9)还包括旋转轴(94)和扭簧(92),所述活动块(91)通过旋转轴(94)连接在支撑座(93)上,所述扭簧(92)套设在旋转轴(94)上且用于复位活动块(91)。
4.根据权利要求3所述的自动取放机构,其特征在于:所述开关组件(9)还包括开口销(95),所述开口销(95)插设在旋转轴(94)两端以避免旋转轴(94)从支撑座(93)上脱落。
5.根据权利要求2所述的自动取放机构,其特征在于:所述本体组件(2)还包括底座(23),所述支撑座(93)和第一安装座(22)安装在底座(23)上。
6.根据权利要求5所述的自动取放机构,其特征在于:所述自动取放机构还包括转盘组件(8),所述转盘组件(8)包括转盘(81)和位于转盘(81)外圆周的凸轮(85),所述转盘(81)设置在底座(23)上且相对于底座(23)可旋转,所述转盘(81)旋转使所述凸轮(85)位于活动块(91)下方以驱动活动块(91)旋转。
7.根据权利要求6所述的自动取放机构,其特征在于:所述凸轮(85)和活动块(91)一一对应设置。
8.根据权利要求6所述的自动取放机构,其特征在于:所述自动取放机构还包括驱动组件(3),所述驱动组件(3)包括驱动件(31)和齿轮(32),所述转盘(81)上设有齿条(83),所述齿条(83)和齿轮(32)相配合,所述驱动件(31)驱动齿轮(32)旋转。
9.根据权利要求1至8中任一项所述的自动取放机构,其特征在于:所述吊球组件(1)包括第二漏斗(12),所述第二漏斗(12)连接于吊绳(11)上且位于重力球(13)上方。
10.根据权利要求1至8中任一项至所述的自动取放机构,其特征在于:所述自动取放机构还包括感应器组件(7)和控制器,所述感应器组件(7)用于感应重力球(13)是否已进入第一安装座(22)内,所述控制器和感应器组件(7)无线连接。
技术总结本发明公开了一种无人机吊装机器人用自动取放机构,包括连接在无人机上的吊球组件以及连接在机器人上的本体组件和开关组件,所述开关组件连接于本体组件上,所述吊球组件包括吊绳和连接在吊绳下部的重力球;所述本体组件包括第一漏斗和用于容纳重力球的第一安装座,在所述第一安装座顶部设有开口,所述第一漏斗设置于开口上,所述开关组件用于当重力球自第一漏斗进入第一安装座内后将重力球锁定在第一安装座内。本发明具有对接时间短的优点。技术研发人员:欧阳峰,盛亚明,樊绍胜,张德文受保护的技术使用者:中电昱创(苏州)智能科技有限公司技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240722/221757.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表