分布式混合动力垂直起降飞行器及其垂直起降控制方法
- 国知局
- 2024-08-01 05:52:48
本发明涉及航空飞行器,具体是一种分布式混合动力垂直起降飞行器及其垂直起降控制方法。
背景技术:
1、分布式混合动力垂直起降飞行器是一种适用于不同起飞环境的新能源飞行器。综合固定翼飞行优越巡航性能及旋翼直升机起降优势,可以在各种飞行环境和各种任务状态下都具备良好的场域性能及飞行性能,即能做到性能与效能、成本与效益的兼顾,又可以提高飞行安全性。
2、分布式飞行器是使动力单元分散,除了可以提供升力还可以增加气动增益,增加升阻比等。此类飞行器可提高能源利用效率,因而能够改进纯电系统的航程短和油动系统消耗高的缺点,其气动外形、高能效的推进系统对于军用小型无人机、中小型民用无人机或大型运输机来说具有更大的应用价值。
3、目前对这种类型飞行器的设计水平和详细的机身集成技术的缺乏,由于分布动力系统的存在,对于气动及结构的更高要求,并且因电力系统的存在,对其内部的布置也应慎重考虑。
技术实现思路
1、本发明为了解决现有技术的问题,提供了一种分布式混合动力垂直起降飞行器及其垂直起降控制方法,不仅能够保证该飞行器垂直起降,拥有较好的横向、纵向稳定性,还能够保证较高的巡航速度以及气动特性,并且通过混合动力方式实现减重及能源节约。
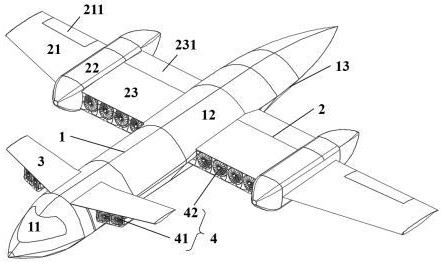
2、本发明提供了一种分布式混合动力垂直起降飞行器,包括机身、机翼、鸭翼和动力系统,所述机身前部安装有鸭翼,机身后部设置有贯穿机身的机翼;所述机翼自机身向外依次包括内段机翼、连接短舱和外段机翼,其中,内段机翼后缘布置有襟翼舵面,外段机翼后缘布置有副翼舵面;所述动力系统包括发电机以及与发电机连接的鸭翼涵道风扇和机翼涵道风扇,鸭翼涵道风扇分布布置于鸭翼下部,机翼涵道风扇分布布置于机翼内段内部。
3、进一步改进,所述机身采用流线型设计,上表面平坦,下表面在机身尾部厚度小于机身其它部位且有反凹。在机身前部布置有乘员舱,机身中部布置有货舱及折叠座椅,用于货物及人员运输,在尾部布置有舱门,方便人员与货物出入;机身长15.5米,高2.8米,宽2.7m。
4、进一步改进,所述内段机翼展长6.9m,展弦比 3.8,根梢比 1,后掠角0°。
5、进一步改进,所述襟翼为后退开缝式襟翼,偏转角度为0°至90°。
6、进一步改进,所述外段机翼展长14.4m,展弦比8,根梢比1.25,后掠角30°。
7、进一步改进,所述鸭翼展长7m,展弦比7-9.5,根梢比1-1.67,后掠角10°-40°,采用远距耦合鸭式布局,鸭翼作动方式为全动鸭翼,鸭翼偏转角度为0°至90°。
8、进一步改进,所述动力系统采用燃油和蓄电池串联式混合动力,发电机内置于机翼连接短舱内部。
9、所述分布式混合动力垂直起降飞行器的垂直起降控制方法,包括以下步骤:
10、1)飞行器在垂直起降时,鸭翼与安装在其上的鸭翼涵道风扇一同偏转至90°,垂直于机体,机翼襟翼偏转至90°;鸭翼涵道风扇直接向下喷气产生升力,机翼涵道风扇则将利用偏转的机翼襟翼使喷流向下偏转产生喷流升力,同时通过后退式襟翼,加速机翼上表面的气流速度从而产生额外的升力。
11、2)飞行器在水平飞行巡航时,鸭翼与安装在其上的鸭翼涵道风扇一同偏转至0°,机翼襟翼偏转至0°;鸭翼和机翼涵道风扇喷气产生推力,机翼与鸭翼产生升力。
12、进一步改进,步骤1)所述垂直起降过程中,通过鸭翼涵道风扇推力变化对飞行器进行俯仰的姿态控制,通过左右涵道风扇推力差对飞行器进行滚转的姿态控制,通过鸭翼和襟翼的左右差动偏转对飞行器进行偏航的姿态控制;步骤2)所述水平飞行巡航过程中,副翼偏转对飞行器进行滚转的姿态控制,鸭翼偏转对飞行器进行俯仰的姿态控制,左右涵道风扇推力差对飞行器进行偏航的姿态控制。
13、进一步改进,动力系统采用串联式混合动力方式,由燃料驱动发电机,发电驱动涵道风扇工作。飞行器可以利用左右涵道风扇推力差进行偏航控制。起降阶段使用电池供电,为起降阶段提供动力支撑,以此减少由于垂直起降所增加的燃油消耗。飞行阶段采用燃料动力,实现涵道风扇的驱动并为电池供电,避免为实现全过程飞行而额外增加的电池重量。
14、本发明有益效果在于:
15、1、本发明选择了分布式涵道风扇的动力方式,可以使飞行器具有足够的动力推进,使飞行器拥有一定的续航能力。
16、2、本发明可以通过机构变换等形式实现垂直起降,拥有较好的横向、纵向稳定性,还能够保证较高的巡航速度以及气动特性。
17、3、本发明通过混合动力方式实现减重及能源节约。
技术特征:1.一种分布式混合动力垂直起降飞行器,包括机身、机翼、鸭翼和动力系统,其特征在于:所述机身前部安装有鸭翼,机身后部设置有贯穿机身的机翼;所述机翼自机身向外依次包括内段机翼、连接短舱和外段机翼,其中,内段机翼后缘布置有襟翼舵面,外段机翼后缘布置有副翼舵面;所述动力系统包括发电机以及与发电机连接的鸭翼涵道风扇和机翼涵道风扇,鸭翼涵道风扇分布布置于鸭翼下部,机翼涵道风扇分布布置于机翼内段内部。
2.根据权利要求1所述的分布式混合动力垂直起降飞行器,其特征在于:所述机身采用流线型设计,上表面平坦,下表面在机身尾部厚度小于机身其它部位且有反凹。
3.根据权利要求1所述的分布式混合动力垂直起降飞行器,其特征在于:所述内段机翼展长6.9m,展弦比 3.8,根梢比 1,后掠角0°。
4.根据权利要求1或3所述的分布式混合动力垂直起降飞行器,其特征在于:所述襟翼为后退开缝式襟翼,偏转角度为0°-90°。
5.根据权利要求1所述的分布式混合动力垂直起降飞行器,其特征在于:所述外段机翼展长14.4m,展弦比8,根梢比1.25,后掠角30°。
6.根据权利要求1所述的分布式混合动力垂直起降飞行器,其特征在于:所述鸭翼展长7m,展弦比7-9.5,根梢比1-1.67,后掠角10°-40°,采用远距耦合鸭式布局,鸭翼作动方式为全动鸭翼,鸭翼偏转角度为0°-90°。
7.根据权利要求1所述的分布式混合动力垂直起降飞行器,其特征在于:所述动力系统采用燃油和蓄电池串联式混合动力,发电机内置于机翼连接短舱内部。
8.一种权利要求1所述分布式混合动力垂直起降飞行器的垂直起降控制方法,其特征在于包括以下步骤:
9.根据权利要求8所述分布式混合动力垂直起降飞行器的垂直起降控制方法,其特征在于:步骤1)所述垂直起降过程中,通过鸭翼涵道风扇推力变化对飞行器进行俯仰的姿态控制,通过左右涵道风扇推力差对飞行器进行滚转的姿态控制,通过鸭翼和襟翼的左右差动偏转对飞行器进行偏航的姿态控制;步骤2)所述水平飞行巡航过程中,副翼偏转对飞行器进行滚转的姿态控制,鸭翼偏转对飞行器进行俯仰的姿态控制,左右涵道风扇推力差对飞行器进行偏航的姿态控制。
10.根据权利要求8所述分布式混合动力垂直起降飞行器的垂直起降控制方法,其特征在于:步骤1)所述垂直起降过程中,发电机通过电池供电,为起降阶段提供动力支撑,步骤2)所述水平飞行巡航过程中,发电机采用燃料动力,实现涵道风扇的驱动并为电池供电。
技术总结本发明提供了一种分布式混合动力垂直起降飞行器及其垂直起降控制方法,飞行器包括机身、机翼、鸭翼和动力系统,其特征在于:所述机身前部安装有鸭翼,机身后部设置有贯穿机身的机翼;所述机翼自机身向外依次包括内段机翼、连接短舱和外段机翼,其中,内段机翼后缘布置有襟翼舵面,外段机翼后缘布置有副翼舵面;所述动力系统包括发电机以及与发电机连接的鸭翼涵道风扇和机翼涵道风扇,鸭翼涵道风扇分布布置于鸭翼下部,机翼涵道风扇分布布置于机翼内段内部。本发明不仅能够保证该飞行器垂直起降,拥有较好的横向、纵向稳定性,还能够保证较高的巡航速度以及气动特性,并且通过混合动力方式实现减重及能源节约。技术研发人员:马松宁,邓双厚,肖天航,许仙鹤受保护的技术使用者:南京航空航天大学技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240722/221863.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表