一种智能巡检机器人的制作方法
- 国知局
- 2024-08-01 05:55:52
:本技术涉及一种机器人,具体为一种智能巡检机器人,属于巡检机器人。
背景技术
0、背景技术:
1、供电、供风和供水系统存在大量的设备巡视工作,多采用传统人工巡检方式。人工巡检方式存在很多不足,如劳动强度大、工存在安全风险等,同时在雷雨天气、受限空间等环境条件下,人工巡检也存在较大安全风险,传统的视频监控系统,由于受到种种条件限制,存在很大的监控盲区,很难真正满足视频监控全方位覆盖的要求。随着智能智慧工厂和无人值守场站模式的推广,巡检机器人逐渐替代人工,实现对设备的巡检作业。
2、现有的智能巡检机器人多数由无人机搭载监控装置,以实现对设备的全方位巡检,但现有的巡检无人机在进行巡检过程中,经过狭窄的场合时,无人机易发生碰撞,进而影响巡检工作,为此,提出一种智能巡检机器人。
技术实现思路
0、技术实现要素:
1、本实用新型的目的在于提供一种智能巡检机器人,以解决上述背景技术中提出的问题之一。
2、本实用新型由如下技术方案实施:一种智能巡检机器人,包括主体组件,所述主体组件包括机壳、四个限位座、四个机臂、安装座、固定座、接近开关、支撑架、螺旋桨、防护环、驱动马达、转盘、转动柱、伺服电机和四个弧形限位槽;
3、四个所述限位座对称固定连接于机壳的内部,所述机臂滑动连接于限位座的内部,所述转动柱转动连接于机臂的一端,所述安装座固定连接于机臂的另一端,所述螺旋桨安装于驱动马达的输出轴,四个所述弧形限位槽对称开设于转盘的上表面,所述转盘的上表面中心固定连接于伺服电机的输出轴,所述转盘转动连接于机壳的内底壁,所述防护环固定连接于支撑架的上表面,所述接近开关嵌接于固定座的内部。
4、作为本技术方案的进一步优选的:所述驱动马达安装于安装座的内部,所述支撑架固定连接于安装座的外侧壁,所述防护环位于螺旋桨的外部。
5、作为本技术方案的进一步优选的:所述伺服电机固定连接于机壳的内顶壁,所述转动柱的外侧壁底部滑动连接于弧形限位槽的内侧壁。
6、作为本技术方案的进一步优选的:四个所述机臂的相邻端对称位于机壳的内部,所述固定座固定连接于机臂下表面远离机壳的一侧。
7、作为本技术方案的进一步优选的:所述机壳的下表面安装有监控组件,所述监控组件包括连接座、高清摄像头、gps定位模块、控制器、两个支撑腿、无线通信模块和控制箱;
8、两个所述支撑腿对称固定连接于机壳的下表面两侧。
9、作为本技术方案的进一步优选的:所述连接座固定连接于机壳的下表面前部,所述高清摄像头安装于连接座的下表面。
10、作为本技术方案的进一步优选的:所述gps定位模块、控制器和无线通信模块均安装于机壳的下表面后部。
11、作为本技术方案的进一步优选的:所述控制箱安装于机壳的上表面。
12、本实用新型的优点:本实用新型通过高清摄像头可以对设备进行拍照和录像,以达到巡检设备的目的,通过接近开关对无人机的位置进行实时监测,当经过狭窄的场合时,接近开关将信号发送至控制器,伺服电机带动转盘转动,转盘通过弧形限位槽带动转动柱,进而可以使四个转动柱向转盘的中间靠近,同时四个机臂向转盘的中心靠近,进而可以减小机臂的长度,以使无人机可以通过狭窄的通道,通过防护环对螺旋桨进行防护,可以避免螺旋桨与外部障碍物产生撞击。
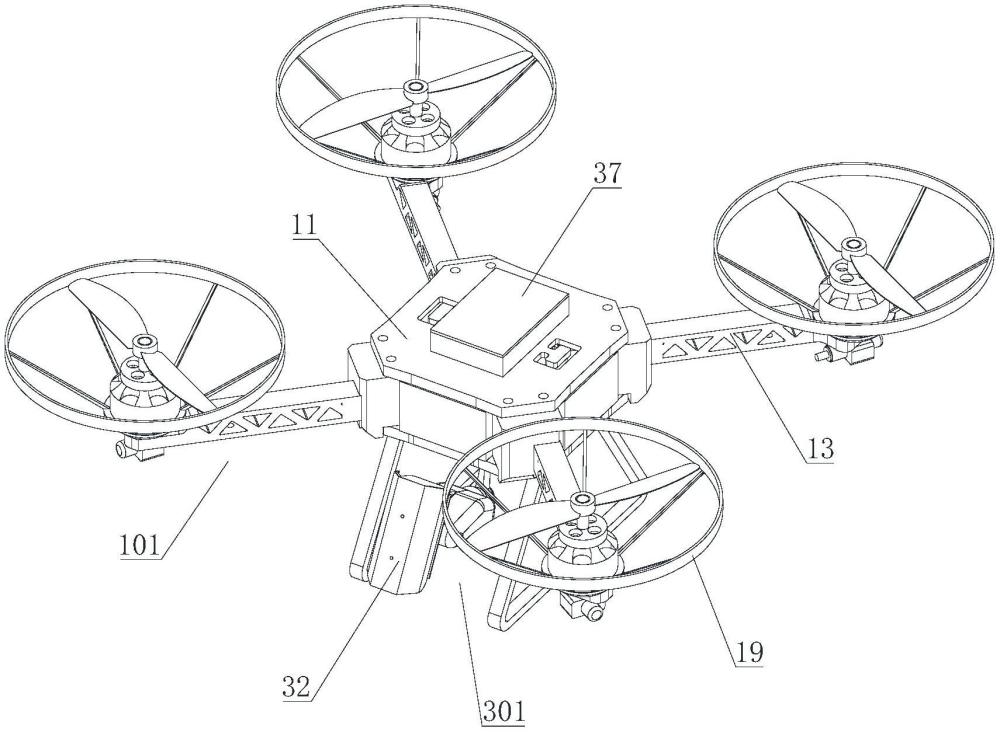
技术特征:1.一种智能巡检机器人,其特征在于,包括主体组件(101),所述主体组件(101)包括机壳(11)、四个限位座(12)、四个机臂(13)、安装座(14)、固定座(15)、接近开关(16)、支撑架(17)、螺旋桨(18)、防护环(19)、驱动马达(20)、转盘(21)、转动柱(22)、伺服电机(23)和四个弧形限位槽(24);
2.根据权利要求1所述的一种智能巡检机器人,其特征在于,所述驱动马达(20)安装于安装座(14)的内部,所述支撑架(17)固定连接于安装座(14)的外侧壁,所述防护环(19)位于螺旋桨(18)的外部。
3.根据权利要求1所述的一种智能巡检机器人,其特征在于,所述伺服电机(23)固定连接于机壳(11)的内顶壁,所述转动柱(22)的外侧壁底部滑动连接于弧形限位槽(24)的内侧壁。
4.根据权利要求1所述的一种智能巡检机器人,其特征在于,四个所述机臂(13)的相邻端对称位于机壳(11)的内部,所述固定座(15)固定连接于机臂(13)下表面远离机壳(11)的一侧。
5.根据权利要求4所述的一种智能巡检机器人,其特征在于,所述机壳(11)的下表面安装有监控组件(301),所述监控组件(301)包括连接座(31)、高清摄像头(32)、gps定位模块(33)、控制器(34)、两个支撑腿(35)、无线通信模块(36)和控制箱(37);
6.根据权利要求5所述的一种智能巡检机器人,其特征在于,所述连接座(31)固定连接于机壳(11)的下表面前部,所述高清摄像头(32)安装于连接座(31)的下表面。
7.根据权利要求5所述的一种智能巡检机器人,其特征在于,所述gps定位模块(33)、控制器(34)和无线通信模块(36)均安装于机壳(11)的下表面后部。
8.根据权利要求5所述的一种智能巡检机器人,其特征在于,所述控制箱(37)安装于机壳(11)的上表面。
技术总结本技术公开了一种智能巡检机器人,包括主体组件,所述主体组件包括机壳、四个限位座、四个机臂、安装座、固定座、接近开关、支撑架、螺旋桨、防护环、驱动马达、转盘、转动柱、伺服电机和四个弧形限位槽;四个所述限位座对称固定连接于机壳的内部。本技术通过接近开关对无人机的位置进行实时监测,当经过狭窄的场合时,接近开关将信号发送至控制器,伺服电机带动转盘转动,转盘通过弧形限位槽带动转动柱,进而可以使四个转动柱向转盘的中间靠近,同时四个机臂向转盘的中心靠近,进而可以减小机臂的长度,以使无人机可以通过狭窄的通道,通过防护环对螺旋桨进行防护,可以避免螺旋桨与外部障碍物产生撞击。技术研发人员:郑伟,马青爽,孙艳坤,赵达,毕海生受保护的技术使用者:内蒙古霍煤鸿骏铝电有限责任公司技术研发日:20231116技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240722/221990.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。