基于高能合成射流流场控制的高超声速飞行器无舵面控制方法
- 国知局
- 2024-08-01 06:01:19
本发明涉及飞行器控制,特别是涉及一种基于高能合成射流流场控制的高超声速飞行器无舵面控制方法。
背景技术:
1、高超声速飞行器,是一种在飞行中能够达到或超过五倍音速(mach 5)的飞行器。在高超声速飞行器进行姿态控制时,主要采用的有两种方式:舵面控制和反作用控制系统。在舵面控制方面,高超声速飞行器通过改变舵面的角度来调整自身的物理结构,进而引起周围流场的变化,实现对姿态的精确调整。这一过程主要依赖于铰链等机械结构的作用,使得舵面位置的调整在时间上通常需要从几分之一秒到几秒不等。然而,这种机械驱动方式存在明显的不足,比如舵体之间的干扰以及缝隙效应等问题可能会对舵面铰链力矩产生不可忽视的干扰,降低控制的精度和效率。此外,在高超声速飞行条件下,舵面会面临极端的气动热挑战,这不仅要求舵面具备高度的热防护能力,还意味着需要额外的热防护结构,这对于追求轻量化的飞行器设计来说,无疑增加了额外的重量和复杂性。
2、而反作用控制系统(reaction control system,rcs),则通过在飞行器侧面布置一系列小型发动机来直接施加力,以控制高超声速飞行器的姿态。这种直接力的作用方式允许高超声速飞行器在空间中更为灵活地进行姿态调整。然而,这种控制所采用的小型发动机,其重量和需要占用的空间均比较大,这对于高超声速飞行器整体性能的影响是不容忽视的。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够减轻重量,并能够实现无舵面控制的基于高能合成射流流场控制的高超声速飞行器无舵面控制方法。
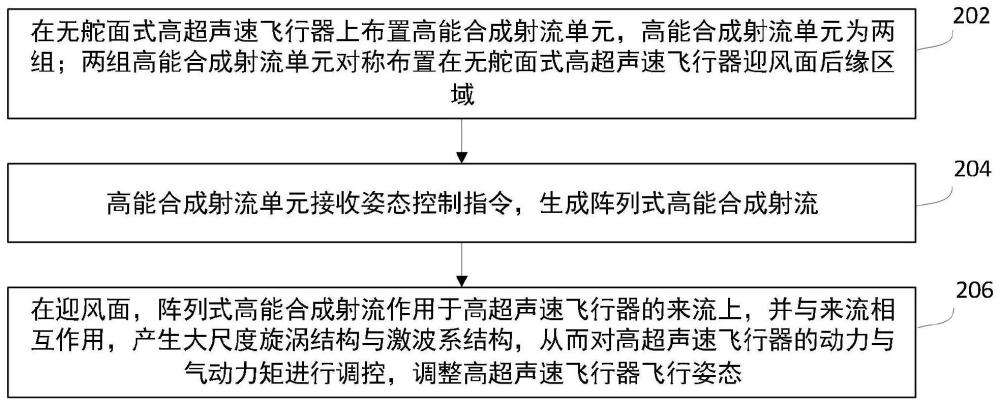
2、一种基于高能合成射流流场控制的高超声速飞行器无舵面控制方法,其特征在于,在无舵面式高超声速飞行器上布置高能合成射流单元,所述高能合成射流单元为两组;两组所述高能合成射流单元对称布置在所述无舵面式高超声速飞行器迎风面后缘区域;所述无舵面控制方法包括:
3、所述高能合成射流单元接收姿态控制指令,生成阵列式高能合成射流;
4、在迎风面,所述阵列式高能合成射流作用于高超声速飞行器的来流上,并与所述来流相互作用,产生大尺度旋涡结构与激波系结构,从而对高超声速飞行器的动力与气动力矩进行调控,调整高超声速飞行器飞行姿态。
5、其中一个实施例中,还包括:
6、通过增加所述阵列式高能合成射流的温度,以增强所述大尺度旋涡结构与所述激波系结构的能量,从而增强对高超声速飞行器的动力与气动力矩的调控。
7、其中一个实施例中,所述高能合成射流单元包括两个以上高能合成射流激励器;
8、两个以上所述高能合成射流激励器布置在所述无舵面式高超声速飞行器迎风面后缘区域,且沿后缘展向阵列排布。
9、其中一个实施例中,相邻高能合成射流激励器之间产生的涡结构相互作用。
10、其中一个实施例中,所述高能合成射流激励器生成的阵列式高能合成射流垂直作用于高超声速飞行器的来流上。
11、其中一个实施例中,所述无舵面式高超声速飞行器上还设置有依次连接的高压气源、恒压装置、流量阀;所述恒压装置和流量阀分别连接处理器,处理器连接有传感器;所述流量阀与所述高能合成射流单元连接;
12、所述无舵面式高超声速飞行器接收姿态控制指令后,所述传感器获取飞行的环境参数,并将所述环境参数发送给所述处理器,所述处理器对所述环境参数进行处理后,控制所述流量阀的开闭状态,从而控制所述高能合成射流单元生成所述阵列式高能合成射流。
13、其中一个实施例中,所述高压气源为高压存储的液态空气。
14、其中一个实施例中,所述高压气源为通过进气道或发动机引气得到的气体。
15、其中一个实施例中,所述高能合成射流激励器为离子体合成射流激励器或自持合成射流激励器。
16、其中一个实施例中,所述流量阀为单向阀。
17、上述基于高能合成射流流场控制的高超声速飞行器无舵面控制方法,通过在无舵面式高超声速飞行器上布置高能合成射流单元,高能合成射流单元为两组;两组高能合成射流单元对称布置在无舵面式高超声速飞行器迎风面后缘区域;无舵面控制方法包括:高能合成射流单元接收姿态控制指令,生成阵列式高能合成射流;在迎风面,阵列式高能合成射流作用于高超声速飞行器的来流上,并与来流相互作用,产生大尺度旋涡结构与激波系结构,从而对高超声速飞行器的动力与气动力矩进行调控,调整高超声速飞行器飞行姿态。
18、本发明应用于无舵面式高超声速飞行器,其取消了原始的机械舵面,而是在迎风面后缘区域设置高能合成射流激励器,通过高能合成射流与高超声速来流相互作用,从而诱导产生大尺度旋涡结构和激波系结构,从而对高超声速飞行器的动力与气动力矩进行调控,调整高超声速飞行器飞行姿态,在减轻高超声速飞行器重量的同时,实现飞行器的无舵面控制。
技术特征:1.一种基于高能合成射流流场控制的高超声速飞行器无舵面控制方法,其特征在于,在无舵面式高超声速飞行器上布置高能合成射流单元,所述高能合成射流单元为两组;两组所述高能合成射流单元对称布置在所述无舵面式高超声速飞行器迎风面后缘区域;所述无舵面控制方法包括:
2.根据权利要求1所述的基于高能合成射流流场控制的高超声速飞行器无舵面控制方法,其特征在于,还包括:
3.根据权利要求1或2所述的基于高能合成射流流场控制的高超声速飞行器无舵面控制方法,其特征在于,所述高能合成射流单元包括两个以上高能合成射流激励器;
4.根据权利要求3所述的基于高能合成射流流场控制的高超声速飞行器无舵面控制方法,其特征在于,相邻高能合成射流激励器之间产生的涡结构相互作用。
5.根据权利要求4所述的基于高能合成射流流场控制的高超声速飞行器无舵面控制方法,其特征在于,所述高能合成射流激励器生成的阵列式高能合成射流垂直作用于高超声速飞行器的来流上。
6.根据权利要求5所述的基于高能合成射流流场控制的高超声速飞行器无舵面控制方法,其特征在于,所述无舵面式高超声速飞行器上还设置有依次连接的高压气源、恒压装置、流量阀;所述恒压装置和流量阀分别连接处理器,处理器连接有传感器;所述流量阀与所述高能合成射流单元连接;
7.根据权利要求6所述的基于高能合成射流流场控制的高超声速飞行器无舵面控制方法,其特征在于,所述高压气源为高压存储的液态空气。
8.根据权利要求6所述的基于高能合成射流流场控制的高超声速飞行器无舵面控制方法,其特征在于,所述高压气源为通过进气道或发动机引气得到的气体。
9.根据权利要求4至8任一项所述的基于高能合成射流流场控制的高超声速飞行器无舵面控制方法,其特征在于,所述高能合成射流激励器为离子体合成射流激励器或自持合成射流激励器。
10.根据权利要求5至7任一项所述的基于高能合成射流流场控制的高超声速飞行器无舵面控制方法,其特征在于,所述流量阀为单向阀。
技术总结本发明涉及一种基于高能合成射流流场控制的高超声速飞行器无舵面控制方法。所述方法包括:在无舵面式高超声速飞行器上布置高能合成射流单元,高能合成射流单元为两组;两组高能合成射流单元对称布置在无舵面式高超声速飞行器迎风面后缘区域;无舵面控制方法包括:高能合成射流单元接收姿态控制指令,生成阵列式高能合成射流;在迎风面,阵列式高能合成射流作用于高超声速飞行器的来流上,并与来流相互作用,产生大尺度旋涡结构与激波系结构,从而对高超声速飞行器的动力与气动力矩进行调控,调整高超声速飞行器飞行姿态。技术研发人员:罗振兵,刘强,丁振伟,谢玮,周岩,王林,邓雄受保护的技术使用者:中国人民解放军国防科技大学技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240722/222459.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表