滑跑式飞行器前起落架助升短距起飞系统的制作方法
- 国知局
- 2024-08-01 06:19:35
本发明属于飞行器设计、制造、运用,涉及滑跑式飞行器前起落架助升短距起飞系统。
背景技术:
1、现有国内外市场在售和应用广泛的军用、民用有人和无人驾驶的滑跑式飞行器及航模、玩具等,特别是采用前三点式起落架的滑跑式飞行器,受多种因素和技术发展瓶颈的制约,普遍都存在着以下的共同缺点:
2、1.飞行器起飞滑跑距离长,对场地要求特别是跑道长度要求特别高。
3、2.对发动机推力和飞行器推重比影响指标要求太严格甚至苛刻。
4、3.影响飞行器的安全、使用寿命、使用效率、售价及市场占有率等。
技术实现思路
1、本发明的目的,就是针对现有飞行器设计、制造、运用技术领域普遍存在的缺点和短板,通过公开提供本发明的滑跑式飞行器前起落架助升短距起飞系统,克服现有及正在按传统思维定势研发生产、应用的各类滑跑式飞行器的固有缺点,实现在现有滑跑式飞行器前起落架技术方案和措施的根本性突破,以适应经济社会发展的各种需求。
2、本发明的技术方案是:在飞行器前起落架原有收放方式、中立支柱、减摆、对中、缓冲、机轮型制及数量、机轮转向、控制程序软件等基本不变的前提下,通过在滑跑式飞行器前起落架中立柱内筒底部与轮轴之间增加硬件顶升装置,并同步增加对飞行器飞控系统软件关于前起落架控制逻辑联动的子程序软件,将滑跑式飞行器前起落架在飞行器滑跑起飞前一定的时间、距离、速度内,使位于前起落架中立支柱内筒底部与轮轴之间的顶升装置启动,将飞行器前起落架上的轮胎轴与飞行器前机体间的距离进一步顶升加大。即飞行器在普通跑道上滑跑到一定的距离、速度时,由于升力的作用,飞行器机头会随着飞行器前起落架上的轮胎轴,与飞行器前机体间的距离逐步加大,而逐渐抬起一定的仰角度,这个仰角度是与起落架中立支柱内筒底部与轮轴之间的顶升装置同步增加的,由于此时前后起落架上的轮胎并未离地,还在接触跑道地面滑跑,随着飞控程序软件的同步联动,发动机进一步增加推力,使前起落架中立支柱内筒底部与轮轴之间达到最大顶升位移,此时飞行器机头抬升角度最大,飞行器在单位时间内滑跑的升力也同步最大,从而提前满足飞行器离地条件,使飞行器整体提前脱离跑道飞向空中,实现短距起飞。
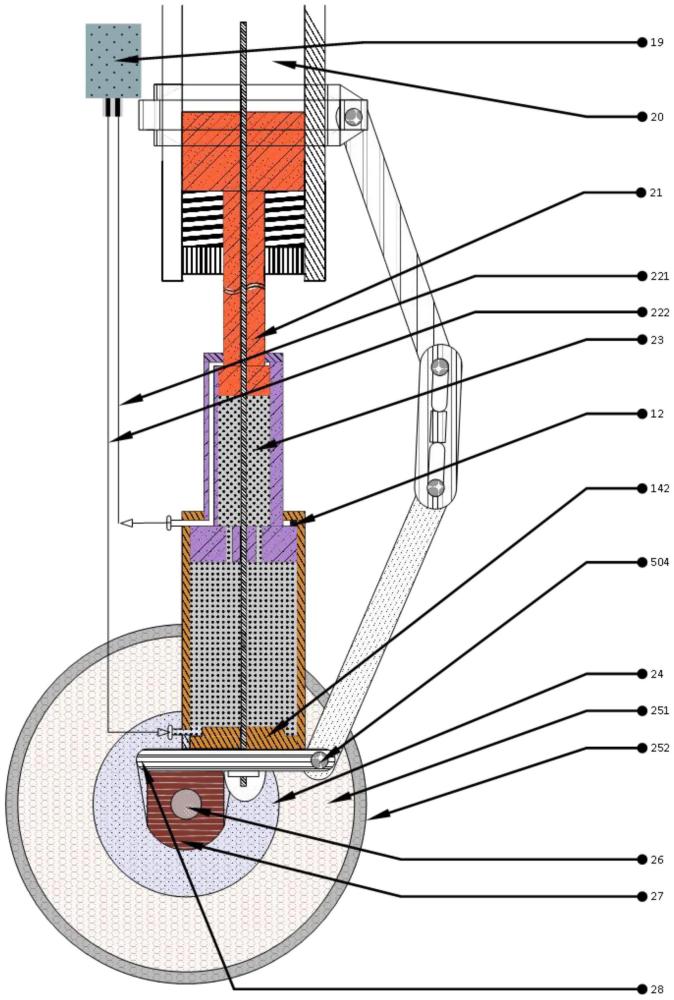
3、本发明的特征在于,系统硬件方面(如图1、图2、图3):一是在飞行器前起落架中立支柱底部与轮轴固定座之间增加本发明顶升装置;二是本顶升装置为一级或多级顶升结构,除末级本身外露出一段作为飞行器前起落架中立支柱缓冲器的内筒不能全部缩回而外,各级均能完全缩回本顶升装置的主体内;三是本顶升装置末级顶升轴顶部与飞行器前起落架中立支柱上部主减震缓冲器内筒底部相连,其轴径、轴长、强度根据不同飞行器具体要求而调整;四是考虑到飞行器前起落架机轮对中问题,本顶升装置设为通体中空、内置对中系统上凸轮中心连杆,以便与采用凸轮对中的飞行器对接;五是由于飞行器前起落架中立支柱底部与机轮轴之间增加了本发明顶升装置,当其顶升至最大行程时,传统的上下扭力臂臂长和扭力传导受限,因此同步设为本发明所示配套的扭力臂;六是设置与顶升装置配套的油液或汽或电等驱动系统,作为本发明顶升装置的驱动能。
4、本发明的特征还在于,系统控制软件方面(如图4):本发明设有专门属于前起落架飞行控制逻辑程序的子系统软件,包括一级或多级顶升装置各级顶升轴行程位移传感器、机轮运动状态传感器、对中状态传感器等数据采集、运算、控制、存储等子程序,总体受飞行器飞控系统统一控制管理。其首先在飞行器起飞滑跑时,程序开始启动,通过自动与手动控制开关的切换;假如在自动控制条件下,系统会通过各种传感器反馈的数据,经中央处理器运算处理后,结果立即判断出飞行器当前是处于飞行器起飞滑跑状态还是处于降落滑跑、移位、静止等状态,假如在手动控制条件下,需要人工观察飞行器起飞滑跑的速度、时间、距离等参数是否满足本发明启动条件,若条件满足,则允许本发明启动相关的硬件,否则不允许本发明启动;若飞行器处于起飞滑跑状态,则判断飞行器速度、时间、距离等参数是否满足本发明启动条件,如果本发明启动条件满足,则允许启动本发明的顶升装置,否则不允许启动本发明的顶升装置;如若本发明启动后,系统进一步判断飞行器前起落架机轮是否完全脱离地面,如果没有完全脱离地面的情况下,本发明的启动状态依然保持,直至飞行器前起落架机轮完全脱离地面为止,才能允许本发明启动复位锁定程序,即将之前伸出的各级顶升轴,除末级而外逐级全部位移缩回本发明顶升装置的一级筒内,并复位锁定,最后才允许飞行器执行常规的收前后起落架程序。总之,本发明相关的配套程序软件控制子系统,严格控制飞行器在飞行中、降落时、除滑跑起飞外的所有地面移位及静止状态下,本发明系统均为安全锁定状态,不允许启动,即只有飞行器在起飞滑跑状态,并同时满足设定的滑跑时间、距离、速度等条件情况下,才允许启动。
5、本发明的优点及有益效果:由于本发明软硬件简单易行,成本极低,能使新老旧及在研制的各型各类滑跑前三点式起落架飞行器实现短距起飞,极大拓展了飞行器应用领域和空间,降低飞行器起降基础条件要求,从而带来了相关一系列包括基建投资费用降低、运用领域拓展、运行效率提高、节能降耗等的正向效果,将为经济及社会效益带来不可估量的贡献。
技术特征:1.滑跑式飞行器前起落架助升短距起飞系统,其特征在于包括在滑跑式飞行器前起落架中立柱底部与前轮轴之间增加一级或多级顶升装置和配套的扭力臂、对中连杆及油液控制器硬件,加上配套的控制子程序软件组成,所述硬件一级或多级顶升装置包括前起落架机轮轮轴(26)上的加强护套(27 )及其上安装的加强连接板(28),加强连接板(28)之上固定安装连接一级顶升装置底座(142),底座(142)以上依次是一级顶升装置外筒(141),一级顶升轴外筒(13),顶升装置二级或末级顶升轴兼主缓冲器活塞连杆(21),前起落架中立支柱主缓冲器(20)连接。
2.根据权利要求1所述的滑跑式飞行器前起落架助升短距起飞系统,其特征在于,所述硬件包括配套的扭力臂由上扭力臂(801)、下扭力臂(802)、扭力臂连接位移调节模块(9)、上下扭力臂连接轴兼阻尼调节器(501、502、503、504)相互连接组成。
3.根据权利要求1所述的滑跑式飞行器前起落架助升短距起飞系统,其特征在于,所述硬件加强连接板(28)、一级顶升装置底座(142)及顶升装置各级顶升轴均设有轴向中心对穿孔,这些孔与顶升装置各级顶升轴内筒的油液或汽室是相互隔离的,以便对中连杆(1)从中穿过时不影响油液或汽的密封和流动,同时轴向对穿孔与轮轴轴向保持一定间距,方便对中系统中心连杆下调节及固定器(18)的对中调节。
4.根据权利要求1所述的滑跑式飞行器前起落架助升短距起飞系统,其特征在于,所述硬件包括安装于飞行器前起落架收放系统相同位置的油液控制器(19)的两高低压力出口分别与输油管(221、222)的一端相连,输油管(221、222)的另一端分别与顶升装置上的油液输送管加排接口(151、152)相连。
5.根据权利要求1所述的滑跑式飞行器前起落架助升短距起飞系统,其特征在于,所述软件包括一级或多级顶升装置各级顶升轴行程位移传感器、机轮运动状态传感器、对中状态传感器等数据采集、运算、控制、存储等子程序,总体受飞行器飞控系统统一控制管理,其特征还在于当飞行器在起飞滑跑到一定的距离、速度时,启动本发明的硬件,使飞行器机头与前轮轴之间达到最大顶升位移,飞行器机头抬升角度最大,在单位时间内滑跑的升力也同步最大,提前满足飞行器起飞离地条件,使飞行器整体提前脱离跑道飞向空中,实现短距起飞。飞行器起飞后,硬件除末级外,各级均能完全缩回本顶升装置的主体内,并复位锁定,执行收前起落架的程序。
6.根据权利要求1所述的滑跑式飞行器前起落架助升短距起飞系统,其特征在于,所述的一级或多级顶升结构,其二级或末级顶升轴顶上部与飞行器前起落架中立支柱上部主减震缓冲器内筒底部相连成一体,即顶升装置二级或末级顶升轴兼主缓冲器活塞连杆(21),其轴径、轴长、强度根据不同飞行器具体要求而调整。
7.根据权利要求2所述的滑跑式飞行器前起落架助升短距起飞系统,其特征在于,当顶升装置顶升至最大行程时,特定的飞行器上下扭力臂(801、802)臂长和扭力传导受限,全靠扭力臂连接位移调节模块(9)解决,对于没有特定要求的飞行器前起落架,可采用传统上下扭力臂(801、802),甚至取消扭力臂。
8.根据权利要求3所述的滑跑式飞行器前起落架助升短距起飞系统,其特征在于,本顶升装置所述的对中系统上凸轮中心连杆(1)及相关轴向中心对穿孔是为特定要求的飞行器专门配置的,对无特定要求的飞行器可不设置。
9.根据权利要求4所述的滑跑式飞行器前起落架助升短距起飞系统,其特征在于,油液控制器(19)的驱动介质可以是油或液或汽等或直接由电驱动。
10.根据权利要求6所述的滑跑式飞行器前起落架助升短距起飞系统,其特征在于,一级或多级顶升结构,其特征在于,驱动介质可以根据飞行器要求采用油或液或汽等或直接由电驱动。
11.根据权利要求6所述的滑跑式飞行器前起落架助升短距起飞系统,其特征在于,末级顶升轴顶(3)下部与飞行器前起落架中立支柱底部(202)密封圈(7)之间设有副减震缓冲器(6),此减震缓冲器可以是油液汽或弹簧等形式。
技术总结本发明公开了滑跑式飞行器前起落架助升短距起飞系统,由在滑跑式飞行器前起落架中立柱底部与前轮轴之间增加一级或多级顶升装置硬件及相应的配套控制程序软件组成,使飞行器在起飞滑跑到一定的距离、速度时,启动本发明的软硬件,使飞行器机头与前轮轴之间达到最大顶升位移,飞行器机头抬升角度最大,在单位时间内滑跑的升力也同步最大,提前满足飞行器起飞离地条件,使飞行器整体提前脱离跑道飞向空中,实现短距起飞。解决了采用前三点式起落架的滑跑式飞行器,包括军用、民用有人或无人驾驶飞行器及航模、玩具等需要长跑道滑跑起飞且能耗高、效率低、对跑道要求苛刻的问题。其应用于飞行器研发生产、改装和升级,将产生显著的经济及社会效益。技术研发人员:肖长江,肖帮和受保护的技术使用者:肖长江技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240722/223307.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种无人机无人值守工作台
下一篇
返回列表