一种微小型仿生飞爬侦察机器人及其控制方法与流程
- 国知局
- 2024-08-01 06:21:27
本发明属于仿生机器人领域,具体涉及一种微小型仿生飞爬侦察机器人及其控制方法。
背景技术:
1、现如今,无人机已经被广泛应用于军事、救灾、植保、摄影等多个领域。例如在常规作战、城市作战或特种作战中,无人机既可以在战场进行空中侦察,以感知战场态势,又可以作为一种可选择的空中打击手段,实现无人察打一体。又例如在灾难搜救工作中,无人机往往可以代替搜救人员或搜救犬,前往较为危险或者情况不明的区域进行灾情勘察,从而降低搜救时的安全风险。
2、但现有的无人机类型仍旧无法满足军事侦察及灾难搜救中某些特定场景的使用需求。如公开号为cn108082487a的中国发明专利申请“一种用于灾难救援的无人机”,该申请虽然可以实现受灾现场灾情的实时监测,但不具备在树枝或栏杆上停靠的仿生夹爪,从而导致因电量有限而无法长时间停留在受灾现场。又例如公开号为cn113400872a的中国发明专利申请“一种陆空两用六足机器人”,该申请虽然具备了可以实现爬行和抓握的六足夹爪,但其整体尺寸较大,不仅不便于战术小队的携带,而且在战场上目标过于明显,隐蔽性较差,容易被敌军或恐怖份子察觉。
3、因此现需要研发一款特殊的微小型仿生飞爬侦察机器人,专门用于军事侦察和灾难搜救中某些特定的使用场景。
技术实现思路
1、针对上述现有技术存在的缺陷,本发明提供了一种微小型仿生飞爬侦察机器人及其控制方法,具有及时部署、隐蔽前置、临时停靠等特点,以满足如军事侦察和灾难搜救中某些特定场景的使用需求。
2、为解决上述技术问题,实现上述技术效果,本发明通过以下技术方案实现:
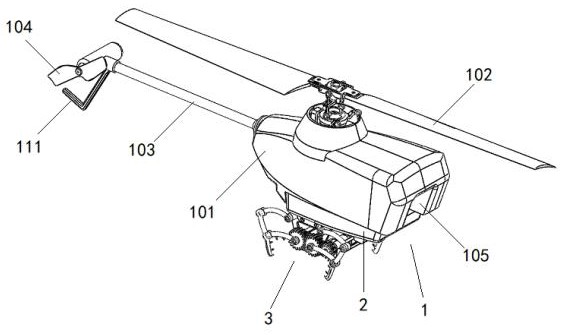
3、一种微小型仿生飞爬侦察机器人,包括微小型无人飞行器、模块化电池和仿生钩刺机构;所述模块化电池可拆卸地设置在所述微小型无人飞行器的底面,所述仿生钩刺机构固定设置在所述模块化电池的下表面;
4、所述仿生钩刺机构包括一个安装架,所述安装架的顶部与所述模块化电池固定连接,所述安装架的前后两端分别左右横向贯穿地设置有一根仿生钩刺转动轴,两根所述仿生钩刺转动轴的左右两端分别固定套设有一个转轴齿轮,且位于同侧的两个所述仿生钩刺转动轴上的所述转轴齿轮均相互啮合;所述安装架上设置有仿生钩刺驱动电机,所述仿生钩刺驱动电机的输出轴上固定套设有电机齿轮,且所述电机齿轮与任意一个所述转轴齿轮相啮合;两根所述仿生钩刺转动轴的左右两端分别固定设置有一个多关节钩足,四个所述多关节钩足共同构成一个钩爪,且四个所述多关节钩足上均一体成型地设置有若干细小的倒刺。
5、进一步的,每个所述多关节钩足均包括第一摇臂、第二摇臂、第三摇臂和第四摇臂,所述第一摇臂的一端与所述仿生钩刺转动轴上对应的一端固定连接,所述第一摇臂的另一端与所述第二摇臂的上端铰接,所述第二摇臂的下端呈弯钩状,所述第三摇臂的下端与所述第二摇臂的上端固定连接,所述第三摇臂的上端与第四摇臂的一端铰接,所述安装架的前后两端分别左右横向贯穿地设置有一根辅助转轴,两根所述辅助转轴的左右两端分别与对应的所述第四摇臂的另一端固定连接;所述倒刺设置在所述第一摇臂和所述第二摇臂的表面。
6、进一步的,所述第一摇臂与所述第四摇臂长度及弧度均相等,且所述第四摇臂与所述第一摇臂上下平行,所述第二摇臂和所述第三摇臂为一个一体成型的二段式摇臂,所述第二摇臂与所述第一摇臂之间的夹角跟所述第四摇臂与所述第三摇臂之间的夹角相同。
7、进一步的,所述安装架由固定顶板、转轴安装侧板、固定底板和电机安装座组成,两块所述转轴安装侧板左右对称地设置在所述固定顶板的左右两侧,所述固定底板位于所述固定顶板的下方,并分别与左右两块所述转轴安装侧板的底端固定连接,所述电机安装座一体成型地设置在所述固定底板的前端;
8、所述固定顶板与所述模块化电池的底面固定连接,其中一根所述仿生钩刺转动轴通过对应的轴承左右贯穿地设置在左右两个所述转轴安装侧板的下部前端,其中另一根所述仿生钩刺转动轴通过对应的轴承左右贯穿地设置在左右两个所述转轴安装侧板的下部后端;对应的,其中一根所述辅助转轴通过对应的轴承左右贯穿地设置在左右两个所述转轴安装侧板的上部前端,其中另一根所述辅助转轴通过对应的轴承左右贯穿地设置在左右两个所述转轴安装侧板的上部后端;所述仿生钩刺驱动电机固定安装在所述电机安装座内。
9、进一步的,所述仿生钩刺驱动电机为微型行星减速空心杯直流电机。
10、进一步的,所述模块化电池通过燕尾槽结构与所述微小型无人飞行器的下表面滑动连接,并且通过卡榫结构与所述微小型无人飞行器的下表面固定连接,所述微小型无人飞行器的下表面上设置有电极触点,所述模块化电池的上表面设置有正、负电极,在所述模块化电池经所述燕尾槽结构及所述卡榫结构正确安装在所述微小型无人飞行器的下表面时,所述正、负电极分别与对应的所述电极触点贴合。
11、进一步的,所述微小型无人飞行器为微型无人直升机。
12、进一步的,所述微型无人直升机包括一个微型直升机主体,所述微型直升机主体的顶部设置有微型主旋翼,所述微型直升机主体的后端通过一根尾杆设置有微型尾旋翼,所述微型直升机主体的前端设置有微型主摄像头,所述微型直升机主体的内部设置有主控板、用于提供升力的微型无刷电机、用于控制飞行方向的微型舵机、用于传输图像的微型图传模块、用于辅助悬停的光流摄像头和气压模块;
13、所述微型无刷电机的输出轴与所述微型主旋翼的转轴传动连接,所述微型主旋翼的转轴通过位于所述尾杆内的联动机构与所述微型尾旋翼传动连接,所述微型舵机的摆杆与所述微型主旋翼固定连接,所述主控板分别与所述微型无刷电机、所述微型舵机、所述微型图传模块、所述光流摄像头、所述气压模块、所述微型主摄像头、所述仿生钩刺驱动电机和所述模块化电池电连接;所述主控板内包含用于与控制终端通信连接的通信模组;
14、所述模块化电池分别为所述主控板、所述微型无刷电机、所述微型舵机、所述微型图传模块、所述光流摄像头、所述气压模块、所述微型主摄像头、所述仿生钩刺驱动电机供电。
15、进一步的,所述微型主摄像头采用具有热成像及夜视功能的微型光电摄像头,以满足夜间侦察需求。
16、进一步的,所述尾杆的末端设置有尾旋翼防碰杆,且所述微型尾旋翼防碰杆由所述尾杆的末端向斜后方向延伸至所述微型尾旋翼的下方。
17、一种微小型仿生飞爬侦察机器人的控制方法,包括以下步骤:
18、步骤1)启动电源,微小型仿生飞爬侦察机器人进入初始化模式,并对其各组件进行功能自检;
19、所述功能自检的内容包括:
20、检查模块化电池的当前剩余电量;
21、检查主控制板与各功能组件之间的信号连接是否正常;
22、检查主控制板与控制终端之间的通信连接是否正常;
23、检查仿生钩刺驱动电机能否驱动四个多关节钩足正常开合;
24、检查微型无刷电机能否驱动微型主旋翼和微型尾旋翼正常旋转;
25、检查微型舵机能否驱动微型主旋翼和微型尾旋翼正常偏转;
26、检查微型主摄像头和光流摄像头能否正常采集图像;
27、检查微型图传模块能否将微型主摄像头采集的图像正常回传至控制终端;
28、检查气压模块能否正常采集气压数据;
29、步骤2)自检完毕后,微小型仿生飞爬侦察机器人从初始化模式切换为起飞模式,操作员手持微小型仿生飞爬侦察机器人,并通过操控控制终端进行放飞;
30、步骤3)待爬升至指定高度后,微小型仿生飞爬侦察机器人从起飞模式切换为巡航模式,操作员通过操作控制终端控制微小型仿生飞爬侦察机器人飞往指定任务区域;
31、步骤4)在飞行过程中,微型主摄像头实时采集微小型仿生飞爬侦察机器人前方画面并将画面传输给主控板,主控板通过微型图传模块再将实时画面回传至控制终端,以便操作员寻找任务区域以及调整飞行的速度、方向和高度;
32、步骤5)当飞行至任务区域时,微小型仿生飞爬侦察机器人从巡航模式切换至悬停模式,并且由光流摄像头和气压模块配合进行辅助悬停,操作员则不断调整微小型仿生飞爬侦察机器人的机头方向,通过微型主摄像头采集的实时画面寻找监控目标;
33、步骤6)当搜寻到监控目标后,若当前位置为狭小空间或当前任务无需隐蔽,则微小型仿生飞爬侦察机器人保持悬停模式进行监控或侦查,若当前位置为户外空间或当前任务有隐蔽需求,则微小型仿生飞爬侦察机器人从悬停模式切换为停泊模式,并且操作员通过微型主摄像头采集的实时画面寻找理想的停泊点;
34、步骤7)当寻找到理想的停泊点后,操作员通过微型主摄像头采集的实时画面控制微小型仿生飞爬侦察机器人飞向停泊点,并在光流摄像头和气压模块配合下逐渐靠近并最终停留在停泊点,最后操作员通过操作控制终端关闭微型无刷电机,从而实现隐蔽监控或侦查;
35、若寻找的停泊点为可抓握停泊物,则操作员通过操作控制终端先控制仿生钩刺驱动电机驱动四个多关节钩足同步张开,当四个多关节钩足包覆住可抓握停泊点后,操作员控制仿生钩刺驱动电机驱动四个多关节钩足同步合拢,此时四个多关节钩足作为四足爪钩握紧可抓握停泊物,并通过四个多关节钩足上的倒刺进行加固;
36、若寻找的停泊点为可支撑停泊面,则操作员通过操作控制终端先控制仿生钩刺驱动电机驱动四个多关节钩足同步张开,当四个多关节钩足与可支撑停泊面接触后,四个多关节钩足作为四足支撑腿稳固站立在可支撑停泊面上;操作员通过操作控制终端先控制仿生钩刺驱动电机驱动四个多关节钩足反复开合,能实现微小型仿生飞爬侦察机器人在可支撑停泊面上的短距爬行;
37、步骤8)当任务完成或模块化电池的剩余电量降至返航所需的最低电量时,微小型仿生飞爬侦察机器人从停泊模式切换为起飞模式,待爬升至指定高度后,又从起飞模式切换为巡航模式,操作员通过操作控制终端控制微小型仿生飞爬侦察机器人返航;
38、步骤9)当飞行至回收点后,微小型仿生飞爬侦察机器人从巡航模式切换为降落模式,操作员通过操控控制终端将微小型仿生飞爬侦察机器人下降至指定高度,并进行人工回收。
39、本发明的有益效果为:
40、本发明是微小型无人侦察平台关键技术和微小型仿生飞爬前沿技术的集成,在体积微小的同时还具备了微型的带倒刺的仿生钩爪,因此不仅便于随身携带,目标极小,具有即时部署、隐蔽前置的优点,甚至是飞行至一些搜救人员或是搜救犬无法进入的狭小空间,而且在隐蔽侦察的过程中,还可以根据实时画面停靠在常规无人机无法停靠的地方,例如树枝或房檐,进一步提升了隐蔽性,可以避免因长时间飞行或悬停而造成的电量消耗过快问题。
41、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。本发明的具体实施方式由以下实施例及其附图详细给出。
本文地址:https://www.jishuxx.com/zhuanli/20240722/223459.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表