一种海陆一体化无人测量艇
- 国知局
- 2024-08-01 06:54:05
本发明属于海洋机器人,具体地说是一种海陆一体化无人测量艇。
背景技术:
1、我国具有很长的海岸线,沿海岛屿众多,勘察测绘近岸岛屿的水上水下地形非常重要。传统水上和水下地形的测量是分开进行的,存在测量效率低、基准难以统一等主要问题。近年来出现的水上水下地形一体化测量系统及测量方法,主要是针对有人船舶开展的。随着无人艇技术发展成熟,出现了搭载单波束测深仪、多波束测深仪的无人艇,主要用于湖泊、海洋等水下地形的测量,为海洋资源开发、海洋工程建设、海洋航道勘测等提供基础数据。
2、传统高速艇设有月池时,需适配封闭式端盖,高速航行时需要将端盖安装,以避免高速流体对月池产生激振力,引起月池剧烈振动,对设备和艇体安全产生影响。一般月池内直接固连多波束测深仪,换能器浸深有效,且高速机动时产生较大水动力矩,容易破坏设备。
3、以往水上水下地形测量时,测量传感器一般分开位置安装,空间位置不统一,数据融合处理时会增加相位误差。一般而言,无人艇由于尺度和排水量小,耐波性较差,在较高海况下进行测量时摇荡幅度大,影响数据采集质量。传统多波束测深仪换能器面垂直朝下安装,会导致水岸一体化测量结果中出现测量“盲区”。针对此,一般在低平潮进行水上潮间带测量,高平潮进行水下地形测量,然后再将水下、水上测量结果进行拼接,但是岛礁海岸带地形以滩涂为主且潮差较小,无法做到真正的无缝拼接。
4、此外,相对于传统有人船舶,有人船舶不具有适应环境广泛化、任务执行自主化、作业过程标准化、任务载荷模块化、作业效率高效化、使用成本低廉化的特点。
技术实现思路
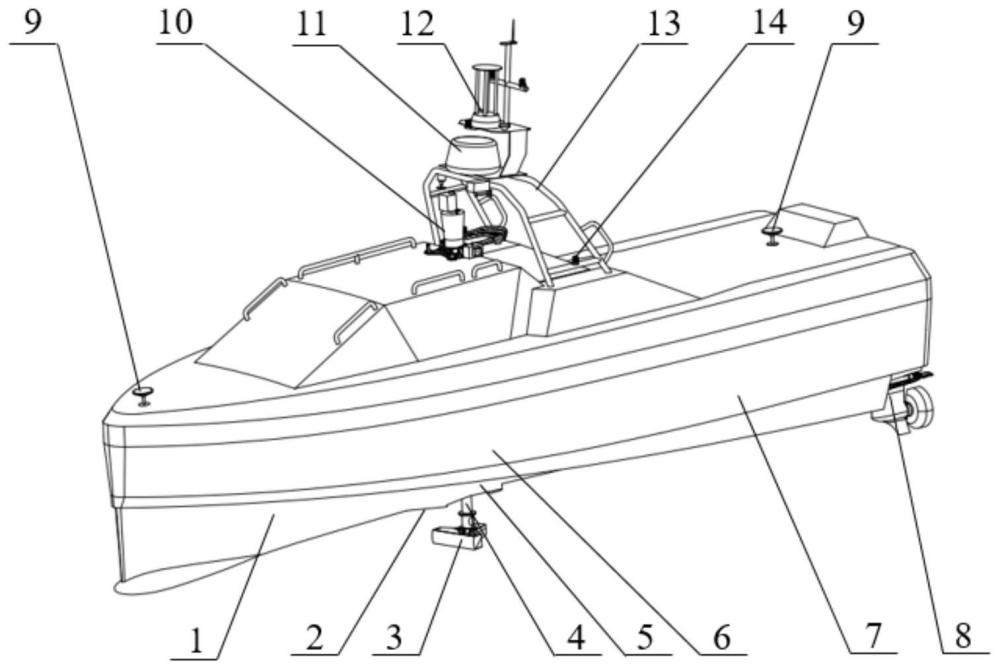
1、本发明的目的在于提供一种海陆一体化无人测量艇,其同轴固连安装多波束测深仪、三维激光扫描仪及定位定姿设备,可实现近岸岛屿水上水下地形复杂环境、高精度、高效率的一体化、无人化测量功能,同时具有高速自主航行能力。
2、本发明为实现上述目的所采用的技术方案是:一种海陆一体化无人测量艇,包括:艇体上测量系统、以及依次设于艇体内部的艏尖舱、电子设备驾驶舱和机舱;
3、所述测量系统设于电子设备驾驶舱、甲板以及艇体底部;
4、所述艏尖舱、电子设备驾驶舱以及机舱均为水密舱室,且相邻两个舱体之间通过水密舱壁板相间隔,水密舱室上方均设有甲板,每个水密舱室共用该甲板,以使各舱体与舱外相隔;
5、所述机舱内设有用于为无人测量艇提供动力的动力推进装置,动力推进装置的执行端外设于机舱外的艇体尾部;所述主控计算机与动力推进装置的驱动器连接;
6、所述电子设备驾驶舱内还设有主控计算机以及导航设备;
7、所述导航设备,用于采集无人测量艇位置和航向信息,发送至主控计算机,主控计算机根据无人测量艇位置和航向信息控制无人测量艇按照规划路径自主航行。
8、甲板上还设有桅杆,所述桅杆为拱形结构,桅杆两端支脚对称连接于甲板上的左右两侧。
9、所述桅杆上固设有感知设备,用于获取无人测量艇的态势信息,并发送至主控计算机,实现对区域目标的自动检测;
10、在感知设备上方的桅杆支架上安装有用于实现远程无线通信的通信设备;
11、所述桅杆上设有声光信号设备,用于根据主控计算机的控制指令进行示警;
12、感知设备、通信设备和声光信号设备均与主控计算机连接。
13、在电子设备驾驶舱中部位置对应的艇体底部处开设有月池;
14、所述月池为向电子设备驾驶舱延伸的中空空间。
15、所述月池前端设有月池导流装置,所述月池导流装置为楔形导流板。
16、所述艏尖舱内设有陀螺减摇仪,用于实现无人艇在设定海况下的减摇。
17、所述测量系统,包括:定位定姿设备天线、以及与测量信息处理机连接的多波束测深仪、三维激光扫描仪以及定位定姿设备,测量信息处理机与主控计算机连接,进行指令信息交互;
18、所述定位定姿设备天线有两个,且分别与定位定姿设备连接,定位定姿设备天线分别设于甲板上的首、尾处;
19、所述定位定姿设备设于电子设备驾驶舱内,所述定位定姿设备分别与定位定姿设备天线、多波束测深仪和三维激光扫描仪连接,用于将采集到的时间、艇姿态、航向信息分别传输至多波束测深仪和三维激光扫描仪,以将多源测量传感器不同步的测量结果同步到同一基准下,完成多源测量数据时间和空间配准,实现水上水下一体化测量;
20、所述三维激光扫描仪设于甲板上,用于进行近岸岛屿水上地形测量;
21、所述多波束测深仪设于艇体外底部的月池中,用于进行水下地形测量。
22、所述多波束测深仪设于月池内,在月池顶面上的电子设备驾驶舱内设有升降机构;
23、升降机构的输出端穿出月池顶面与多波束测深仪连接,多波束测深仪与升降机构输出端之间通过转接装置连接,以通过升降机构带动多波束测深仪进行高度升降及角度变换。
24、所述多波束测深仪、定位定姿设备和三维激光扫描仪垂向同轴设置,以减小相位误差,提高测量数据融合精度。
25、还包括:遥控设备和驾驶台;
26、所述驾驶台与动力推进装置连接,用于人为根据任务需求对无人测量艇进行控制;
27、所述遥控设备接收岸基端指令,遥控设备与主控计算机连接,接收指令后遥控操控航行;水面控制台发送遥控控制信息,经由通信设备直接传输给艇端主控计算机,执行遥控操控的功能。
28、本发明具有以下有益效果及优点:
29、1.本发明基于无人艇平台搭载三维激光扫描仪、定位定姿设备和多波束测深仪组成的海陆一体化测量系统,实现近岸岛屿的水上水下地形一体化、无人化测量。
30、2.本发明三维激光扫描仪、定位定姿设备和多波束测深仪垂向同轴固连,将获取到的空间信息归算到统一的坐标系下,实现水上水下一体化测量,通过垂向同轴固连减小测量传感器采集数据的相位误差,提高测量数据融合精度。
31、3.本发明三维激光扫描仪、定位定姿设备和多波束测深仪同轴安装于艇体重心纵向、横向位置处附近,最大限度减小艇体纵摇、横摇运动对测量传感器的影响。
32、4.本发明艇体月池前端设有特殊的楔形导流装置,对艇体底部流线进行导流,且与艇体底部结构完全适配贴合,消除无人艇高速航行时对月池后壁产生水流激振力,解决了月池设计与高速航行的矛盾,无需增设月池封闭端盖,实现无人艇在高速区间安全航行和低速测量区间的有机结合。
33、5.本发明艏尖舱设有陀螺减摇仪,结合艇型优化可实现无人艇在高海况下的有效减摇,保证多波束测深仪及三维激光扫描仪可在高海况下获取高精度测量数据。
34、6.本发明设有多波速测深仪自动升降机构,测量工作时将多波束测深仪伸入水下一定浸深,提高换能器浸湿深度,减小流噪声干扰,高速航行时将多波束测深仪收回至月池内部,保证高速机动时设备安全。
35、7.本发明多波束测深仪的倾斜角度可变换,解决了多波束开角局限导致的水岸一体化测量盲区,实现水上水下测量数据无缝覆盖。
本文地址:https://www.jishuxx.com/zhuanli/20240722/225401.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。