一种仿生软体机器人及其制造方法
- 国知局
- 2024-08-01 07:00:58
本发明涉及仿生机器人,特别是涉及一种仿生软体机器人及其制造方法。
背景技术:
1、软体机器人设备具有适应各种复杂环境的能力,能够代替人类完成一些具有高危险、高难度的任务。因此,近年来,软体机器人设备引起了科研人员的广泛关注。软体机器人设备一般分为柔性传感器、软体致动器以及多功能集成的软体机器人。与刚性材料制成的坚硬易碎的传统机器人相比,软体机器人更加柔软轻巧,能够实现一些不需要高强度但要求极高灵活度的任务。
2、软体机器人一般由易变形的物质组成,如弹性体、形状记忆聚合物、响应性水凝胶、电活性聚合物等。值得提出的是,磁控软体机器人以外部磁场为驱动源,能够实现快速、可逆、无束缚致动,并且磁驱动能够穿透多种常见物质,如空气,水和人体等,实现无障碍致动。因此,磁响应的软体机器人可以在狭小和密闭的空间内进行无束缚操作和执行任务,进一步开拓了其应用的空间。
3、目前,基于磁响应的软体机器人可制作成仿生鱼的结构形式,能够实现在液体环境中的运动,但是现有类似仿生鱼的软体机器人的仿生结构比较简单,和真实的自然界鱼类生物结构相差较大,使软体机器人的仿生度较低,且在液体环境中的运动不够灵活,无法满足复杂多变的使用环境。
技术实现思路
1、本发明的目的是提供一种仿生软体机器人及其制造方法,以提高软体机器人结构的仿生度,且实现运动仿生,提高运动灵活度。
2、为了实现上述目的,本发明采用以下技术方案:
3、本发明的一个方面是提供一种仿生软体机器人,包括:
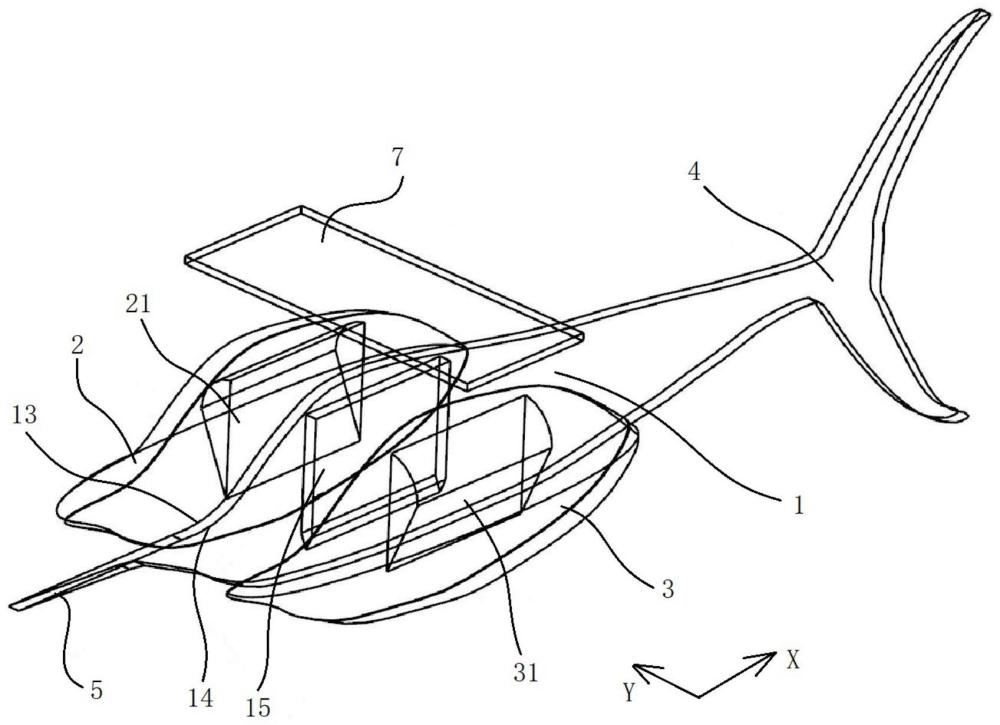
4、躯干,沿第一方向具有第一端和第二端,所述第一端设有头部,所述躯干沿与所述第一方向相交的第二方向具有相背的第一面和第二面;
5、第一腹部,连接于所述躯干的所述第一面;
6、第二腹部,连接于所述躯干的所述第二面;
7、尾部,设于所述躯干的第二端,所述尾部沿所述第一方向依次分为第一子尾部、第二子尾部和第三子尾部,所述第一子尾部包括第一弹性体,所述第二子尾部包括第二弹性体和第三弹性体,所述第三子尾部包括第四弹性体,所述第三弹性体和所述第四弹性体内均具有磁性体,所述第二弹性体与所述第三弹性体沿所述第一方向交替设置,以使所述第二子尾部的磁性和模量均呈梯度分布;
8、外加磁场作用于所述尾部,使所述尾部沿所述第二方向循环摆动变形。
9、优选地,所述躯干的中部设有通孔,所述第一腹部具有朝向所述躯干的第一凹槽;所述第二腹部具有朝向所述躯干的第二凹槽,所述第一凹槽、所述第二凹槽分别与所述通孔连通形成空腔结构。
10、优选地,所述空腔结构呈倒水滴形状。
11、优选地,所述仿生软体机器人还包括胸鳍部,所述胸鳍部连接在所述躯干的背部。
12、优选地,所述胸鳍部为矩形平板结构,所述胸鳍部平行于所述第一方向的中心面与所述躯干平行于所述第一方向的中心面共面。
13、优选地,所述磁性体在所述第三弹性体内的含量为(1~80)wt%,所述磁性体在所述第四弹性体内的含量为(1~80)wt%。
14、本发明的另一个方面是提供一种如上所述的仿生软体机器人的制造方法,包括:
15、步骤s1,采用第一弹性材料通过3d打印制作第一腹部和第二腹部,并进行固化处理;
16、步骤s2,通过3d打印制作躯干和尾部,并进行固化处理,其中,所述躯干的头部、所述躯干、所述尾部的第一子尾部采用第一弹性材料打印,所述尾部的第二子尾部采用第一弹性材料和第二弹性材料交替打印,所述尾部的第三子尾部采用第二弹性材料打印,所述第二弹性材料包括所述第一弹性材料和磁性材料;
17、步骤s3,将固化后的第一腹部、第二腹部、躯干进行组装粘合,制成预成型件;
18、步骤s4,将所述预成型件放置于脉冲磁场下磁化至饱和,得到成型件。
19、优选地,所述步骤s3之前,还包括制备胸鳍部;所述步骤s3还包括将所述胸鳍部固定在所述躯干的背部。
20、优选地,所述步骤s1和所述步骤s2中,所述3d打印为墨水直写3d打印,所述墨水直写3d打印的挤出气压为100kpa~3000kpa,打印移动速度为0.1mm/s~10mm/s,填充密度为80%~100%,打印喷嘴直径为0.025mm~1.5mm。
21、优选地,所述步骤s4中,将所述预成型件垂直放入充/退磁机的线圈中心,使所述预成型件的第一方向与脉冲磁场的方向始终处于同一方向,将磁场瞬间释放,以使所述预成型件获得沿第一方向的磁化方向。
22、本发明实施例一种仿生软体机器人及其制造方法与现有技术相比,其有益效果在于:
23、本发明实施例的仿生软体机器人,包括躯干、第一腹部、第二腹部和尾部,第一腹部连接于躯干的第一面,第二腹部连接于躯干的第二面,第一腹部和第二腹部形成仿生软体机器人的腹部结构,使得仿生软体机器人的仿生结构更接近真实的自然界鱼类生物结构,提高软体机器人的仿生度。尾部沿第一方向依次分为第一子尾部、第二子尾部和第三子尾部,第二子尾部包括交替设置的第二弹性体和具有磁性体的第三弹性体,使得第二子尾部的磁性和模量均呈梯度分布,第三子尾部包括具有磁性体的第四弹性体。在向仿生软体机器人施加磁场时,在外加磁场的作用下,躯干、第一腹部和第二腹部不受磁场刺激,具有磁性体的第二子尾部和第三子尾部对磁场做出响应,使得尾部沿第二方向循环摆动变形,在尾部变动变形过程中带动躯干、第一腹部和第二腹部随之发生轻微变形。在液体环境中时,循环摆动的尾部与液体环境相互作用,尾部受到液体的反作用力的作用,产生向前的推进力,推动躯干、头部等向前运动,使得软体机器人通过尾部的摆动变形实现向前的运动,类似于真实的自然界鱼类生物的游动方式,从而实现运动仿生,使得仿生软体机器人在液体环境中灵活游动,提高运动灵活度。
技术特征:1.一种仿生软体机器人,其特征在于,包括:
2.根据权利要求1所述的仿生软体机器人,其特征在于,所述躯干的中部设有通孔,所述第一腹部具有朝向所述躯干的第一凹槽;所述第二腹部具有朝向所述躯干的第二凹槽,所述第一凹槽、所述第二凹槽分别与所述通孔连通形成空腔结构。
3.根据权利要求2所述的仿生软体机器人,其特征在于,所述空腔结构呈倒水滴形状。
4.根据权利要求1所述的仿生软体机器人,其特征在于,所述仿生软体机器人还包括胸鳍部,所述胸鳍部连接在所述躯干的背部。
5.根据权利要求4所述的仿生软体机器人,其特征在于,所述胸鳍部为矩形平板结构,所述胸鳍部平行于所述第一方向的中心面与所述躯干平行于所述第一方向的中心面共面。
6.根据权利要求1所述的仿生软体机器人,其特征在于,所述磁性体在所述第三弹性体内的含量为(1~80)wt%,所述磁性体在所述第四弹性体内的含量为(1~80)wt%。
7.一种如权利要求1至6任意一项所述的仿生软体机器人的制造方法,其特征在于,包括:
8.根据权利要求7所述的仿生软体机器人的制造方法,其特征在于,所述步骤s3之前,还包括制备胸鳍部;所述步骤s3还包括将所述胸鳍部固定在所述躯干的背部。
9.根据权利要求7所述的仿生软体机器人的制造方法,其特征在于,所述步骤s1和所述步骤s2中,所述3d打印为墨水直写3d打印,所述墨水直写3d打印的挤出气压为100kpa~3000kpa,打印移动速度为0.1mm/s~10mm/s,填充密度为80%~100%,打印喷嘴直径为0.025mm~1.5mm。
10.根据权利要求7所述的仿生软体机器人的制造方法,其特征在于,所述步骤s4中,将所述预成型件垂直放入充/退磁机的线圈中心,使所述预成型件的第一方向与脉冲磁场的方向始终处于同一方向,将磁场瞬间释放,以使所述预成型件获得沿第一方向的磁化方向。
技术总结本发明涉及仿生机器人技术领域,公开了一种仿生软体机器人及其制造方法,仿生软体机器人包括躯干、第一腹部、第二腹部和尾部,躯干的第一端设有头部,躯干具有相背的第一面和第二面;第一腹部连接于第一面;第二腹部连接于第二面;尾部设于第二端,尾部沿第一方向依次分为第一子尾部、第二子尾部和第三子尾部,第一子尾部包括第一弹性体,第二子尾部包括第二弹性体和第三弹性体,第三子尾部包括第四弹性体,第三弹性体和第四弹性体内均具有磁性体,第二弹性体与第三弹性体沿第一方向交替设置,以使第二子尾部的磁性和模量均呈梯度分布;外加磁场作用于尾部,使尾部循环摆动变形。本发明可提高仿生软体机器人的仿生度,且实现运动仿生。技术研发人员:郭双壮,欧兴成受保护的技术使用者:中山大学技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240722/225757.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表