防倾覆太阳能水面垃圾清理机器人
- 国知局
- 2024-08-01 07:00:56
本发明属于水面清理,更具体地说,特别涉及防倾覆太阳能水面垃圾清理机器人。
背景技术:
1、水面垃圾清理机器人是一种用于清理水体表面漂浮垃圾和污染物的智能机器人,这些机器人通常设计成类似船只或浮筒的形状,配备收集装置,能够在水体表面移动,并收集各类垃圾,如塑料瓶、泡沫箱、漂浮物等,水面垃圾清理机器人通常使用太阳能或电池供电,具有较强的适应性和灵活性,可以在湖泊、河流、港口等水域进行有效的垃圾清理工作,有助于改善水质环境,保护水生态系统。
2、1.现有的装置在使用时,为了避免水面垃圾清理机器人被浪涌卷倾覆,通常都会设置舭龙骨来增加水面垃圾清理机器人的稳定性,但现有的水面垃圾清理机器人上的舭龙骨通常为固定长度,无法根据当前区域的浪涌情况来增加舭龙骨的伸缩长度,进而容易导致在较大浪涌的情况下该装置无法进一步提高稳定性,以及在水面正常的情况下无法收回舭龙骨,从而增加了额外的阻力,适用性有待提高;
3、2.现有的水面垃圾清理机器人在清洁时,通常水面垃圾清理机器人的上方都会设置警示灯来代表当前水面垃圾清理机器人的各个工作状态,为避免灰尘挡住警示灯而导致工作人员误判,因此需要定期维护,现有的装置对警示灯清洁时往往为人工清洁,无法完成自动化的清洁,维护起来较为麻烦,实用性有待提高;
4、3.现有的水面垃圾清理机器人上方通常都会设有太阳能光伏板,在充能时需要将太阳能光伏板裸露放置于太阳下吸收光能,但由于灰尘将会粘附在太阳能光伏板表面影响太阳能光伏板吸收光能,因此需要定期维护,现有的装置上的太阳能光伏板通常为人工擦拭维护,无法进行自动化的处理,因此维护起来较为麻烦,实用性有待提高。
技术实现思路
1、为了解决上述技术问题,本发明提供防倾覆太阳能水面垃圾清理机器人,以解决上述的问题。
2、防倾覆太阳能水面垃圾清理机器人,包括水面垃圾清理机器人本体,所述水面垃圾清理机器人本体侧壁上对称设有驱动单元,所述水面垃圾清理机器人本体远离驱动单元一侧的侧壁上对称设有捕捞单元,所述水面垃圾清理机器人本体表面对称固定安装有辅助把手:
3、所述水面垃圾清理机器人本体上端部设有防倾覆及清理一体化机构;
4、所述防倾覆及清理一体化机构包括光伏单元,所述水面垃圾清理机器人本体内部对称开设有滑槽,两个所述滑槽均位于光伏单元上方,两个所述滑槽均位于光伏单元两侧。
5、优选的,所述防倾覆及清理一体化机构还包括电机、支撑座、转杆、蜗杆、丝纹、传动板、齿条组总成、转轴、齿轮、清洁总成、斜槽、限位槽、丝杆、蜗轮、限位块与舭龙骨,所述电机位于水面垃圾清理机器人本体上端部,所述电机与水面垃圾清理机器人本体固定安装,所述支撑座位于水面垃圾清理机器人本体上端部,所述支撑座与水面垃圾清理机器人本体固定安装,所述电机和支撑座位于光伏单元之间,所述转杆位于电机的输出轴与支撑座之间,所述转杆与电机的输出轴固定安装,所述转杆与支撑座转动安装。
6、优选的,两个所述蜗杆均设于转杆圆周表面,所述丝纹设于转杆圆周表面,所述丝纹设于蜗杆之间,所述传动板位于滑槽之间,所述传动板与滑槽滑动安装,所述传动板与丝纹螺纹安装,两个所述齿条组总成均位于传动板上端部,两个所述齿条组总成均与传动板固定安装,两个所述齿条组总成高度不同,所述水面垃圾清理机器人本体上端部对称固定安装有警示灯。
7、优选的,两个所述警示灯均位于电机两侧,两个所述转轴均位于警示灯上端部,两个所述转轴均与警示灯转动安装,两个所述齿轮均位于警示灯圆周表面,两个所述齿轮均与警示灯转动安装,两个所述齿轮均位于转轴下方。
8、优选的,两个所述清洁总成均位于转轴与齿轮之间,两个所述清洁总成均与转轴与齿轮固定安装,两个所述清洁总成内侧均与警示灯贴合,两个所述齿条组总成均与齿轮啮合安装,所述斜槽均开设于水面垃圾清理机器人本体内部。
9、优选的,两个所述斜槽均位于辅助把手内侧,两个所述斜槽均位于滑槽下方,每组所述限位槽均开设于斜槽侧壁上,两个所述丝杆均位于斜槽内部,两个所述丝杆均与斜槽转动安装,两个所述丝杆均位于斜槽的中心处,两个所述丝杆均部分裸露于水面垃圾清理机器人本体上方,两个所述蜗轮均位于丝杆圆周表面,两个所述蜗轮均与丝杆固定安装,两个所述蜗杆均与蜗轮啮合安装。
10、优选的,每个所述限位块均位于限位槽内部滑动安装,两个所述舭龙骨均位于限位块两两之间,两个所述舭龙骨均与限位块固定安装,每个所述舭龙骨均与斜槽滑动安装,每个所述舭龙骨均与丝杆螺纹安装,所述水面垃圾清理机器人本体下端部设有舱门,所述传动板下端部固定安装有清洁板,所述清洁板与光伏单元贴合。
11、与现有技术相比,本发明具有如下有益效果:
12、本发明中,通过根据当前水面的浪涌大小、风力情况等因素开启电机,使得电机带动转杆在支撑座之间进行转动,进而带动给蜗杆与蜗轮发生啮合,使得蜗轮产生一个径向力带动丝杆转动并与舭龙骨发生螺纹传动,进而控制舭龙骨沿着丝杆的螺纹向下移动,从而完成控制舭龙骨的伸缩,进而使得在浪涌较大或风力较强时,可以适当伸出舭龙骨以增加支撑面积,从而提高稳定性,而在风平浪静时,可以将舭龙骨收回以减少阻力和提高机动性,提高适用性,避免倾覆;
13、本发明中,通过开启电机,使得电机带动转杆在支撑座之间进行转动,进而使得转杆带动丝纹转动,此时传动板将会与丝纹发生螺纹传动,使得传动板沿着丝纹向支撑座一侧移动,进而带动传动板上的齿条组总成与齿轮发生啮合,使得齿轮带动清洁总成在转轴和齿轮之间进行转动并与警示灯表面发生摩擦,进而完成对警示灯的清洁,进而起到便于维护的效果;
14、本发明中,通过开启电机,使得电机带动转杆在支撑座之间进行转动,进而使得转杆带动丝纹转动,此时传动板将会与丝纹发生螺纹传动,进而带动传动板向支撑座一侧进行移动,从而带动清洁板从光伏单元表面发生摩擦,进而清理掉光伏单元表面的灰尘,从而可以进一步提高该装置便于维护的效果;
15、本发明中,通过设置滑槽和限位槽,可以使得该装置开启电机带动舭龙骨进行移动以及对警示灯和光伏单元进行清洁时,能够使得舭龙骨带动限位块在限位槽内移动以及传动板在滑槽内进行移动,进而可以提供多方的支撑,增加稳定性;
16、本发明中,当开启电机时,通过转杆、蜗杆、丝纹、齿轮、丝杆和蜗轮之间的机械配合,可以使得该装置能够完成对舭龙骨的调节以及警示灯和光伏单元的清洁,进而可以使得该装置可以在实现较多功能的情况下最大化的减少驱动装置,不仅可以大幅减少该装置整体的重量,同时还可以起到节能的效果,从而进一步提高环保性;
17、本发明中,通过优化该装置的结构以及布局,设置防倾覆及清理一体化机构,使得该装置整体结构紧凑,并且具备防倾覆以及对警示灯和光伏单元的同步清洁,极大的提高了水面垃圾清理机器人本体在进行垃圾清理时的稳定性以及工作人员维护时的便携性,较为实用。
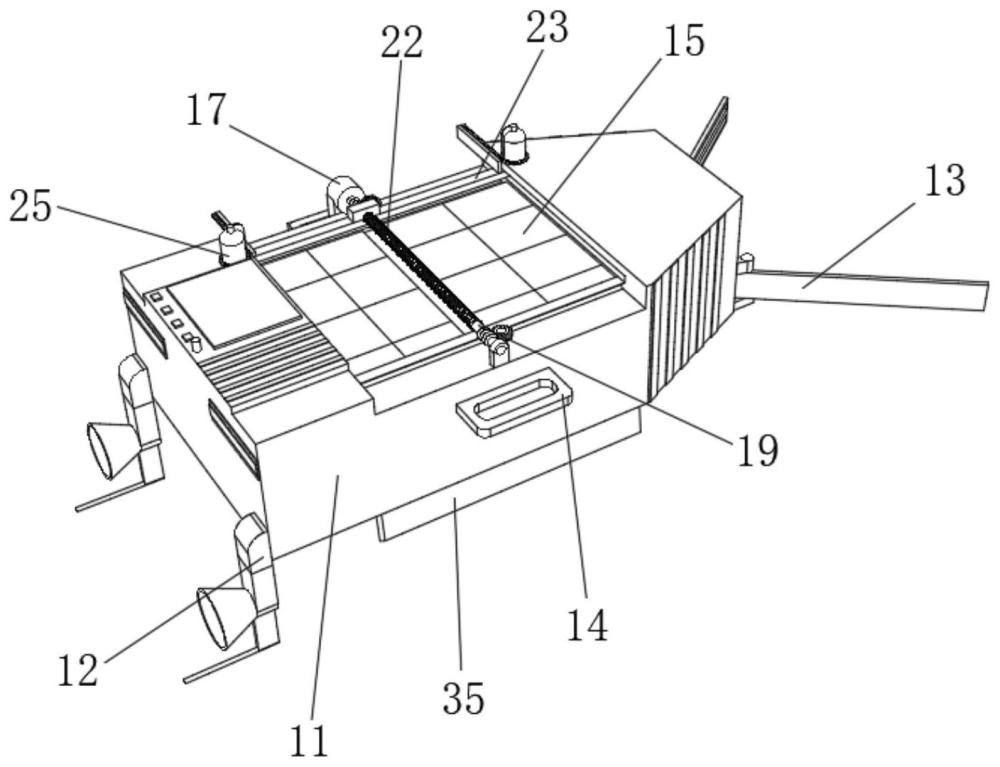
技术特征:1.防倾覆太阳能水面垃圾清理机器人,包括水面垃圾清理机器人本体(11),所述水面垃圾清理机器人本体(11)侧壁上对称设有驱动单元(12),所述水面垃圾清理机器人本体(11)远离驱动单元(12)一侧的侧壁上对称设有捕捞单元(13),所述水面垃圾清理机器人本体(11)表面对称固定安装有辅助把手(14),其特征在于:
2.如权利要求1所述防倾覆太阳能水面垃圾清理机器人,其特征在于,所述防倾覆及清理一体化机构还包括电机(17)、支撑座(18)、转杆(19)、蜗杆(21)、丝纹(22)、传动板(23)、齿条组总成(24)、转轴(26)、齿轮(27)、清洁总成(28)、斜槽(29)、限位槽(31)、丝杆(32)、蜗轮(33)、限位块(34)与舭龙骨(35);
3.如权利要求2所述防倾覆太阳能水面垃圾清理机器人,其特征在于,所述支撑座(18)位于水面垃圾清理机器人本体(11)上端部,所述支撑座(18)与水面垃圾清理机器人本体(11)固定安装,所述电机(17)和支撑座(18)位于光伏单元(15)之间,所述转杆(19)位于电机(17)的输出轴与支撑座(18)之间,所述转杆(19)与电机(17)的输出轴固定安装,所述转杆(19)与支撑座(18)转动安装。
4.如权利要求3所述防倾覆太阳能水面垃圾清理机器人,其特征在于,两个所述蜗杆(21)均设于转杆(19)圆周表面,所述丝纹(22)设于转杆(19)圆周表面,所述传动板(23)位于滑槽(16)之间,所述传动板(23)与滑槽(16)滑动安装,所述传动板(23)与丝纹(22)螺纹安装,两个所述齿条组总成(24)均位于传动板(23)上端部,两个所述齿条组总成(24)均与传动板(23)固定安装,两个所述齿条组总成(24)高度不同,所述水面垃圾清理机器人本体(11)上端部对称固定安装有警示灯(25)。
5.如权利要求4所述防倾覆太阳能水面垃圾清理机器人,其特征在于,两个所述警示灯(25)均位于电机(17)两侧,两个所述转轴(26)均位于警示灯(25)上端部,两个所述转轴(26)均与警示灯(25)转动安装,两个所述齿轮(27)均位于警示灯(25)圆周表面,两个所述齿轮(27)均与警示灯(25)转动安装。
6.如权利要求5所述防倾覆太阳能水面垃圾清理机器人,其特征在于,两个所述清洁总成(28)均位于转轴(26)与齿轮(27)之间,两个所述清洁总成(28)均与转轴(26)与齿轮(27)固定安装,两个所述清洁总成(28)内侧均与警示灯(25)贴合,两个所述齿条组总成(24)均与齿轮(27)啮合安装,所述斜槽(29)均开设于水面垃圾清理机器人本体(11)内部。
7.如权利要求6所述防倾覆太阳能水面垃圾清理机器人,其特征在于,两个所述斜槽(29)均位于辅助把手(14)内侧,两个所述斜槽(29)均位于滑槽(16)下方,每组所述限位槽(31)均开设于斜槽(29)侧壁上,两个所述丝杆(32)均位于斜槽(29)内部,两个所述丝杆(32)均与斜槽(29)转动安装。
8.如权利要求7所述防倾覆太阳能水面垃圾清理机器人,其特征在于,两个所述丝杆(32)均位于斜槽(29)的中心处,两个所述丝杆(32)均部分裸露于水面垃圾清理机器人本体(11)上方,两个所述蜗轮(33)均位于丝杆(32)圆周表面,两个所述蜗轮(33)均与丝杆(32)固定安装,两个所述蜗杆(21)均与蜗轮(33)啮合安装。
9.如权利要求8所述防倾覆太阳能水面垃圾清理机器人,其特征在于,每个所述限位块(34)均位于限位槽(31)内部滑动安装,两个所述舭龙骨(35)均位于限位块(34)两两之间,两个所述舭龙骨(35)均与限位块(34)固定安装,每个所述舭龙骨(35)均与斜槽(29)滑动安装。
10.如权利要求9所述防倾覆太阳能水面垃圾清理机器人,其特征在于,每个所述舭龙骨(35)均与丝杆(32)螺纹安装,所述水面垃圾清理机器人本体(11)下端部设有舱门(36),所述传动板(23)下端部固定安装有清洁板(37)。
技术总结本发明提供防倾覆太阳能水面垃圾清理机器人,涉及水面清理技术领域,包括水面垃圾清理机器人本体,水面垃圾清理机器人本体上端部设有防倾覆及清理一体化机构,防倾覆及清理一体化机构包括光伏单元,水面垃圾清理机器人本体内部对称开设有滑槽,两个滑槽均位于光伏单元上方,两个滑槽均位于光伏单元两侧,电机位于水面垃圾清理机器人本体上端部,电机与水面垃圾清理机器人本体固定安装,通过优化该装置的结构以及布局,设置防倾覆及清理一体化机构,使得该装置整体结构紧凑,并且具备防倾覆以及对警示灯和光伏单元的同步清洁,极大的提高了水面垃圾清理机器人本体在进行垃圾清理时的稳定性以及工作人员维护时的便携性,较为实用。技术研发人员:陈旺,薛冬阳,朱亚强,王雪皓,张格玮,柏松,王小乐,景天雨,赵淑玉,马晓洁受保护的技术使用者:天津商业大学技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240722/225754.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表