一种具有自动识别功能的船舶水下清理机器人
- 国知局
- 2024-08-01 07:01:16
本发明涉及水下机器人,具体来说,涉及一种具有自动识别功能的船舶水下清理机器人。
背景技术:
1、船舶在水中长时间航行,船体下方就会附着大量的海藻,上面会寄居着许多藤壶、牡蛎等海洋生物,日积月累,这些海洋生物的数量就非常庞大。海生物的附着将导致诸多不利条件,尤其是使得船体表面的粗糙度增加,增大了船舶表面的航行阻力,导致船体航行速度降低约10%,燃油成本增加约40%,还会引发外来物种入侵等生态问题。另外附着在船底的海洋生物还会分泌腐蚀性物质,时间长了会破坏船底的涂层和结构,降低船只航行的安全性。所以及时清理水下船体表面具有非常重要的意义。
2、传统船体清理通常由人工进行清理,不仅费用昂贵,效率低下,在清理者进行水下清理时还会产生一定危险,因此用清理机器人替代人力,实现智能化船舶水下清理作业极具前景,现有的清理机器人清理下来的附着生物或无处理机制,直接排入海中,容易造成物种入侵,或是借助复杂的处理设备,成本高昂、工艺复杂,而且现有的清理机器人清理船底时大部分靠磁吸装置,此装置仅仅适用于钢铁材质的船体,对于玻璃钢或其他材质的船体则无能为力。
3、针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现思路
1、针对相关技术中的问题,本发明提出一种具有自动识别功能的船舶水下清理机器人,以克服现有相关技术所存在的上述技术问题。
2、为此,本发明采用的具体技术方案如下:
3、一种具有自动识别功能的船舶水下清理机器人,包括壳体和位于所述壳体底端两侧的行进组件,所述壳体的底端前后两侧均设有清理滚筒,所述壳体的一侧设有视觉模块,所述壳体的底端中部设有十字型支架,所述十字型支架的每端均设有连接盘,所述连接盘上设有清理刀头,所述清理刀头与位于所述连接盘内的旋转马达输出端相连接,所述十字型支架上设有与所述连接盘相连接的调节组件。
4、作为优选的,所述调节组件包括位于所述十字型支架内的矩形旋转块,所述矩形旋转块的每个边角处均设有倾斜设置的l型连接杆,所述l型连接杆的一端设有滑块,所述十字型支架内设有与所述滑块相匹配的滑道,所述滑块的上设有延伸至所述十字型支架外并与所述连接盘相连接的连接柱。
5、作为优选的,所述l型连接杆通过活动轴分别与所述滑块和所述矩形旋转块相对应连接,所述十字型支架内设有与所述矩形旋转块相连接的伺服电机。
6、作为优选的,所述十字型支架上开设有供所述连接柱活动的行程孔,所述壳体上设有与所述十字型支架相连接的驱动电机。
7、作为优选的,所述视觉模块包括双目摄像头、激光雷达、导航模块、速度检测模块和识别模块。
8、作为优选的,所述双目摄像头对其进行跟踪拍摄,并将拍摄的物价在跟踪框的中心点作为目标点,分别得到目标点在双目摄像头的两个摄像机以像素为单位的图像坐标系中的坐标。
9、作为优选的,所述激光雷达在水下工作区域创建d栅格地图,并通过所述导航模块发送导航目标点,所述导航模块根据目标点与当前位置,规划由当前位置到目标点的行走路径。
10、作为优选的,所述导航模块沿规划出的路径运动,所述导航模块根据视觉图像和激光雷达数据,计算水下清理机器人运动过程中与障碍物的相对速度,从而根据速度冲突检测方法实时计算水下清理机器人下一时刻的最优运动速度。
11、作为优选的,所述识别模块通过图像数据识障碍物,取第一张视觉图像数据,并确定障碍物在地图坐标系下的中心位置坐标,同时与激光数据匹配,提取障碍物中心位置附近的点作为一组障碍物点集。
12、作为优选的,所述壳体的顶端开设有通孔,所述通孔内设有抽水螺旋桨。
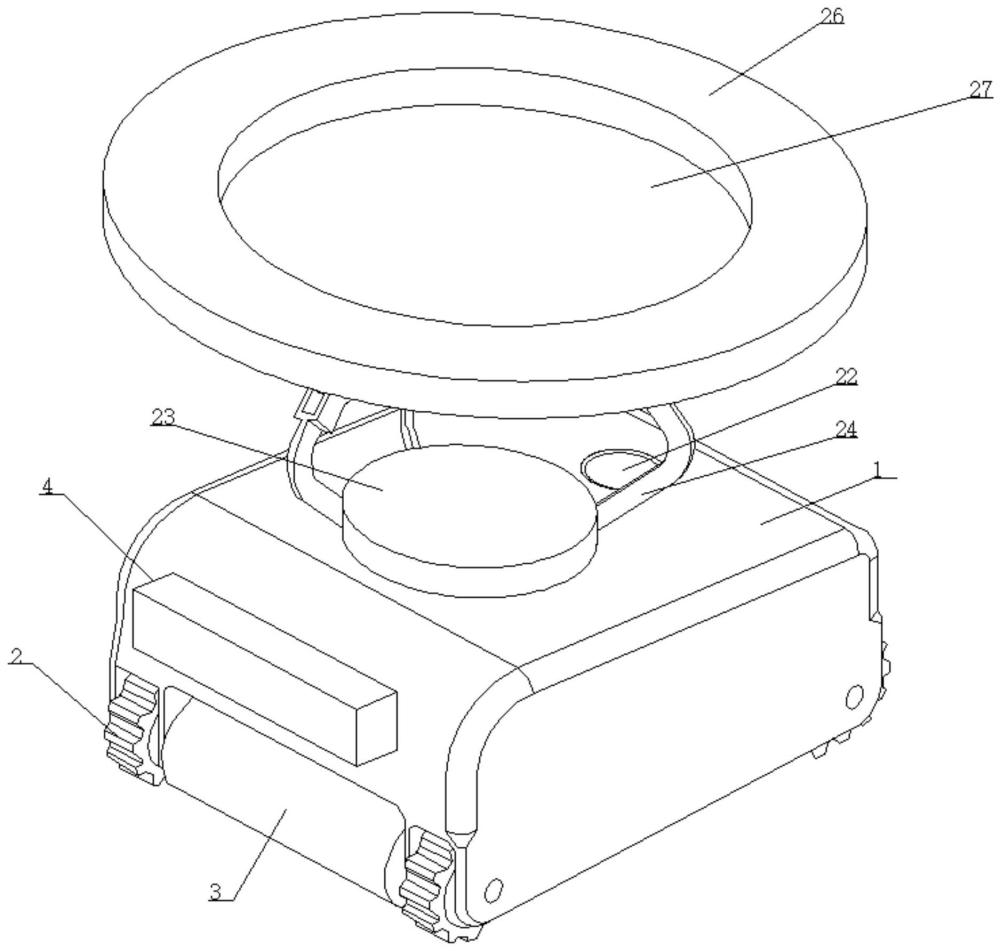
13、作为优选的,所述壳体1的顶端且位于所述通孔22的一侧设有罩壳23,所述罩壳23的外壁环绕设有若干均匀分布的l型活动杆24,所述l型活动杆24的顶端设有活动件25,所述活动件25的顶端设有空化射流升降盘26,所述空化射流升降盘26的中部开设有孔洞27,所述孔洞27内设有螺旋桨28,所述l型活动杆24通过微调组件与所述罩壳23相连接。
14、作为优选的,所述微调组件包括位于所述罩壳23内竖向设置的蜗杆29,所述蜗杆29的外壁环绕设有与所述l型活动杆24数量相适配的蜗轮30,所述蜗轮30轴心处设有转轴31,所述l型活动杆24的底端延伸至所述罩壳23内与所述转轴31相连接。
15、本发明的有益效果为:通过抽水螺旋桨的设计,可以源源不绝的将腔体内的水抽出,一方面可以产生足够的压力,使机器人压紧船底表面,这样可以适用于几乎所有材质的船体,而不是仅仅适用于钢铁船体,另一方面清理下来的船底附着物也会随着抽出的水一起被抽出,同时随着高速旋转的螺旋桨会将随水流出的附着生物打碎,使之灭活,避免了物种入侵的危险,而视觉模块的设计,获取周边环境信息,这使得机器人具有较强的环境感知与避障能力,可以根据水下环境实时调整其行进路径与作业方式,提高工作效率与安全性,考虑相对运动速度因素设定安全速度边界,降低水下机器人与障碍物发生运动冲突的概率,提高水下机器人运动的安全性与流畅性,空化射流升降盘与微调组件的配合下,可以根据附着生物的位置自行调节高度位置,使得清理位置更加准确,减少了高压水流在水下受到的阻力,螺旋桨搅动水流,使得机器人受到水流的反作用力并移动到船体的外表面。
技术特征:1.一种具有自动识别功能的船舶水下清理机器人,包括壳体(1)和位于所述壳体(1)底端两侧的行进组件(2),其特征在于,所述壳体(1)的底端前后两侧均设有清理滚筒(3),所述壳体(1)的一侧设有视觉模块(4),所述壳体(1)的底端中部设有十字型支架(5),所述十字型支架(5)的每端均设有连接盘(6),所述连接盘(6)上设有清理刀头(7),所述清理刀头(7)与位于所述连接盘(6)内的旋转马达输出端相连接,所述十字型支架(5)上设有与所述连接盘(6)相连接的调节组件。
2.根据权利要求1所述的一种具有自动识别功能的船舶水下清理机器人,其特征在于,所述调节组件包括位于所述十字型支架(5)内的矩形旋转块(8),所述矩形旋转块(8)的每个边角处均设有倾斜设置的l型连接杆(9),所述l型连接杆(9)的一端设有滑块(10),所述十字型支架(5)内设有与所述滑块(10)相匹配的滑道(11),所述滑块(10)的上设有延伸至所述十字型支架(5)外并与所述连接盘(6)相连接的连接柱(12)。
3.根据权利要求2所述的一种具有自动识别功能的船舶水下清理机器人,其特征在于,所述l型连接杆(9)通过活动轴(13)分别与所述滑块(10)和所述矩形旋转块(8)相对应连接,所述十字型支架(5)内设有与所述矩形旋转块(8)相连接的伺服电机(14)。
4.根据权利要求3所述的一种具有自动识别功能的船舶水下清理机器人,其特征在于,所述十字型支架(5)上开设有供所述连接柱(12)活动的行程孔(15),所述壳体(1)上设有与所述十字型支架(5)相连接的驱动电机(16)。
5.根据权利要求1所述的一种具有自动识别功能的船舶水下清理机器人,其特征在于,所述视觉模块(4)包括双目摄像头(17)、激光雷达(18)、导航模块(19)、速度检测模块(20)和识别模块(21)。
6.根据权利要求5所述的一种具有自动识别功能的船舶水下清理机器人,其特征在于,所述双目摄像头(17)对其进行跟踪拍摄,并将拍摄的物价在跟踪框的中心点作为目标点,分别得到目标点在双目摄像头的两个摄像机以像素为单位的图像坐标系中的坐标。
7.根据权利要求6所述的一种具有自动识别功能的船舶水下清理机器人,其特征在于,所述激光雷达(18)在水下工作区域创建3d栅格地图,并通过所述导航模块(19)发送导航目标点,所述导航模块(19)根据目标点与当前位置,规划由当前位置到目标点的行走路径。
8.根据权利要求7所述的一种具有自动识别功能的船舶水下清理机器人,其特征在于,所述导航模块(19)沿规划出的路径运动,所述导航模块(19)根据视觉图像和激光雷达数据,计算水下清理机器人运动过程中与障碍物的相对速度,从而根据速度冲突检测方法实时计算水下清理机器人下一时刻的最优运动速度,所述识别模块(21)通过图像数据识障碍物,取第一张视觉图像数据,并确定障碍物在地图坐标系下的中心位置坐标,同时与激光数据匹配,提取障碍物中心位置附近的点作为一组障碍物点集,所述壳体(1)的顶端开设有通孔(22)。
9.根据权利要求8所述的一种具有自动识别功能的船舶水下清理机器人,其特征在于,所述壳体(1)的顶端且位于所述通孔(22)的一侧设有罩壳(23),所述罩壳(23)的外壁环绕设有若干均匀分布的l型活动杆(24),所述l型活动杆(24)的顶端设有活动件(25),所述活动件(25)的顶端设有空化射流升降盘(26),所述空化射流升降盘(26)的中部开设有孔洞(27),所述孔洞(27)内设有螺旋桨(28),所述l型活动杆(24)通过微调组件与所述罩壳(23)相连接。
10.根据权利要求9所述的一种具有自动识别功能的船舶水下清理机器人,其特征在于,所述微调组件包括位于所述罩壳(23)内竖向设置的蜗杆(29),所述蜗杆(29)的外壁环绕设有与所述l型活动杆(24)数量相适配的蜗轮(30),所述蜗轮(30)轴心处设有转轴(31),所述l型活动杆(24)的底端延伸至所述罩壳(23)内与所述转轴(31)相连接。
技术总结本发明公开了一种具有自动识别功能的船舶水下清理机器人,包括壳体和位于所述壳体底端两侧的行进组件,所述壳体的底端前后两侧均设有清理滚筒,所述壳体的一侧设有视觉模块,所述壳体的底端中部设有十字型支架,所述十字型支架的每端均设有连接盘,所述连接盘上设有清理刀头,所述清理刀头与位于所述连接盘内的旋转马达输出端相连接。有益效果:视觉模块的设计,获取周边环境信息,这使得机器人具有较强的环境感知与避障能力,可以根据水下环境实时调整其行进路径与作业方式,提高工作效率与安全性,考虑相对运动速度因素设定安全速度边界,降低水下机器人与障碍物发生运动冲突的概率,提高水下机器人运动的安全性与流畅性。技术研发人员:谢鸥,沈晔湖,郭丽华受保护的技术使用者:苏州科技大学技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240722/225779.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。