一种小型有缆水下探测机器人
- 国知局
- 2024-08-01 07:02:43
本发明涉及水下探测,尤其是一种小型有缆水下探测机器人。
背景技术:
1、水下机器人是一种能够在于水下环境中进行工作的机器人,常用于结构检查、渔类行为观察、水产养殖、渔业、潮汐电站、有毒液体、潜水场地检查、犯罪现场搜索、水下搜救科研教育、科学研究、水下考古、水下生物观察等水下作业活动。目前水下机器人大部分体积大、操作复杂、成本较高,其应用受到限制。
技术实现思路
1、本发明提出一种小型有缆水下探测机器人,体积小,操作简易,成本低廉。
2、本发明采用以下技术方案。
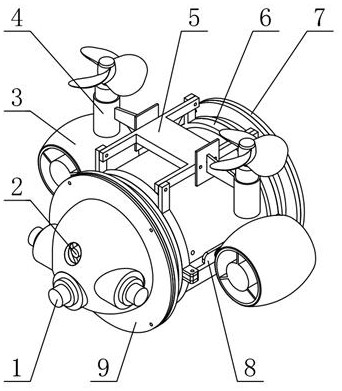
3、一种小型有缆水下探测机器人,所述机器人包括设于其前部凸起部位处的摄像头(2)和多个超声波测距装置(1),还包括设于其两侧部处的水平推进器和设于其上部的垂直推进器;所述水平推进器(3)、垂直推进器(4)按接收到的控制指令工作,驱动机器人在水中移动或调整姿态。
4、所述机器人的前部凸起部位为机器人前部的前球罩;多个超声波测距装置分设于球罩的正面前端下侧及两侧;所述摄像头设于球罩正面前端上侧。
5、所述水平推进器通过支撑架(8)与固定环(6)连接至机器人的舱体(12)左右两侧形成固定安装结构;所述垂直推进器通过横梁(5)与固定环(6)连接至舱体(12)的左右偏上侧并形成固定安装结构。
6、所述机器人后部设有后端盖,后端盖中央偏下侧处镶嵌安装有电源按键,后端盖中央处镶嵌安装有航空插座(11),前球罩(9)与后端盖(7)通过双o型密封圈(13)与舱体配合安装。
7、所述机器人包括主控模块,主控模块通过舱体两侧两个水平推进器(3)实现机器人在水下的前进及后退,通过水平推进器间的差速工作实现机器人的转向;主控模块通过两个垂直推进器(4)实现机器人的上浮和下潜,通过垂直推进器间的差速实现机器人的翻转。
8、主控模块通过rs485线缆与上位机通信,将摄像头(2)采集的图像实时传输至上位机,以实现水下图像采集;同时,上位机通过发送不同的运动控制指令实现对机器人的运动控制及姿态调整。
9、所述超声波测距装置(1)由螺母(14)、防水垫圈(15)、水下避障传感器(16)组成,所述螺母(14)、防水垫圈(15)、水下避障传感器(16)呈同轴配合关系,构成旋转结构,通过螺母拧紧固定在前球罩壁上。
10、所述前球罩(9)与后端盖(7)通过双o型密封圈形成水下密封结构,使用紧固件进行与舱体(12)固定配合;
11、所述机器人内部无浮箱,机器人在水下运行时,以水平推进器、垂直推进器的推力来调整机器人的潜水深度。
12、机器人处设有与机器人主控模块相连的线缆接口,其位于后端盖的航空插座处;所述航空插座内部与主控模块的stm32主控单片机连接,外部与rs485线缆连接。rs485线缆另一端通过转接头与外部的上位机相连,构成该小型有缆水下探测采样机器人的通信系统,以在保证了机器人的防水性能的需求下兼顾上位机与机器人的通信的稳定性。
13、所述机器人的水下运行方法包括以下步骤:
14、步骤s1、上位机经线缆向机器人发送开始指令,使机器人启动摄像头,将拍摄图像由机器人传输至上位机,使用者根据图像对机器人当前所在的探测环境进行评估;
15、步骤s2、使用者根据探测环境由上位机向机器人发送运动控制指令,机器人主控模块系统接收到运动控制指令后,将输出信号传递至水平推进器和垂直推进器;接收到信号后水平推进器和垂直推进器开始运行,其内置电机启动,根据运动控制指令执行对应的操作,实现机器人的前进、后退、转向的基本运动;
16、步骤s3、机器人在运动时,主控模块通过多个超声波测距装置对运动方向上的障碍物进行测距,通过机器人内的陀螺仪、加速度传感器对机器人行动路径进行记录,根据机器人当前的运动速度和方向来评估碰撞概率并将评估结果回传给上位机。
17、与现有技术相比,本发明具有以下有益效果:本发明提供了一种小型有缆水下探测采样机器人,解决了现有水下探测机器人结构体积较大、应用场合受到较大限制的问题。该小型有缆水下探测采样机器人与传统框架式机器人相比,采用了流线型外观设计,结构紧凑,安装简易携带方便。同时,该小型有缆水下探测采样机器人自身携带供电系统,具有良好的续航性能。此外,该小型有缆水下探测采样机器人具有有线通讯系统,通过rs485线缆能够实现水下摄像头图像的稳定传输,以及上位机对机器人运动的控制,具有良好的人机交互,性能稳定。
18、由于在本发明中完全以推进器动力来调整机器人的潜水深度,所以不设浮箱,从而大大减小了机器人体积,使机器人易于在狭小空间内作业。
技术特征:1.一种小型有缆水下探测机器人,其特征在于:所述机器人包括设于其前部凸起部位处的摄像头(2)和多个超声波测距装置(1),还包括设于其两侧部处的水平推进器和设于其上部的垂直推进器;所述水平推进器(3)、垂直推进器(4)按接收到的控制指令工作,驱动机器人在水中移动或调整姿态。
2.根据权利要求1所述的一种小型有缆水下探测机器人,其特征在于:所述机器人的前部凸起部位为机器人前部的前球罩;多个超声波测距装置分设于球罩的正面前端下侧及两侧;所述摄像头设于球罩正面前端上侧。
3.根据权利要求2所述的一种小型有缆水下探测机器人,其特征在于:所述水平推进器通过支撑架(8)与固定环(6)连接至机器人的舱体(12)左右两侧形成固定安装结构;所述垂直推进器通过横梁(5)与固定环(6)连接至舱体(12)的左右偏上侧并形成固定安装结构。
4.根据权利要求2所述的一种小型有缆水下探测机器人,其特征在于:所述机器人后部设有后端盖,后端盖中央偏下侧处镶嵌安装有电源按键,后端盖中央处镶嵌安装有航空插座(11),前球罩(9)与后端盖(7)通过双o型密封圈(13)与舱体配合安装。
5.根据权利要求2所述的一种小型有缆水下探测机器人,其特征在于:所述机器人包括主控模块,主控模块通过舱体两侧两个水平推进器(3)实现机器人在水下的前进及后退,通过水平推进器间的差速工作实现机器人的转向;主控模块通过两个垂直推进器(4)实现机器人的上浮和下潜,通过垂直推进器间的差速实现机器人的翻转。
6.根据权利要求5所述的一种小型有缆水下探测机器人,其特征在于:主控模块通过rs485线缆与上位机通信,将摄像头(2)采集的图像实时传输至上位机,以实现水下图像采集;同时,上位机通过发送不同的运动控制指令实现对机器人的运动控制及姿态调整。
7.根据权利要求2所述的一种小型有缆水下探测机器人,其特征在于:所述超声波测距装置(1)由螺母(14)、防水垫圈(15)、水下避障传感器(16)组成,所述螺母(14)、防水垫圈(15)、水下避障传感器(16)呈同轴配合关系,构成旋转结构,通过螺母拧紧固定在前球罩壁上。
8.根据权利要求4所述的一种小型有缆水下探测机器人,其特征在于:所述前球罩(9)与后端盖(7)通过双o型密封圈形成水下密封结构,使用紧固件进行与舱体(12)固定配合;
9.根据权利要求6所述的一种小型有缆水下探测机器人,其特征在于:机器人处设有与机器人主控模块相连的线缆接口,其位于后端盖的航空插座处;所述航空插座内部与主控模块的stm32主控单片机连接,外部与rs485线缆连接;
10.根据权利要求9所述的一种小型有缆水下探测机器人,其特征在于:所述机器人的水下运行方法包括以下步骤:
技术总结本发明提出一种小型有缆水下探测机器人,所述机器人包括设于其前部凸起部位处的摄像头(2)和多个超声波测距装置(1),还包括设于其两侧部处的水平推进器和设于其上部的垂直推进器;所述水平推进器(3)、垂直推进器(4)按接收到的控制指令工作,驱动机器人在水中移动或调整姿态;本发明所述设备体积小,操作简易,成本低廉。技术研发人员:李劲林,邹超榕,施玮恒,王浩杰,周嘉兴受保护的技术使用者:福州大学技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240722/225840.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种小型船锚的制作方法
下一篇
返回列表