一种仿生水下清理机器人及其使用方法
- 国知局
- 2024-08-01 07:05:15
本发明涉及一种清洗机器人,尤其是涉及一种仿生水下清理机器人及其使用方法。
背景技术:
1、水下海生物的清洗方法主要包括手工清理、机械摩擦式清理、高压水清洗和空化射流清洗,以上几种方法由于手工清理劳动强度大、效率低下,并且还得对海洋平台结构回船坞进行清理,因此,在海生物清理中逐渐退居为辅助性的工作方法。
2、目前,行业内常采用的人工清洗方法效率低,人力物力耗费大,并且对工作人员的生命安全有一定的威胁。而高压水射流清洗则伴随着对防腐层的破坏,且清洗压力高,存在安全隐患。专利申请cn202310406497.6中公开了一种两栖式水下清扫机器人,此机器人采用刷盘式清洁,专利申请cn202111520520.1中公开了一种仿生水下清理机器人,采用高压水清理,上述两种机器人的清理方式不但清洗效率低,并且对海洋生物附着物的清洗效果不佳。
技术实现思路
1、发明目的:针对上述问题,本发明的目的是提供一种仿生水下清理机器人,能够合理有效地对海上钻井平台水下设施进行清洗,有效地解决水下海生物清洗难题。并提供了其使用方法。
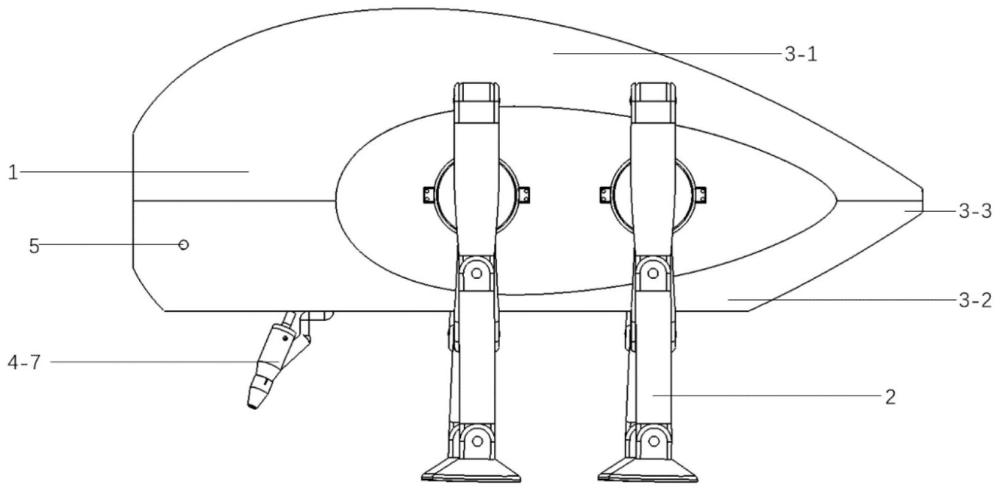
2、技术方案:一种仿生水下清理机器人,包括机器人主体、水下磁吸机械足,机器人主体包括仿生龙虱外壳、空化清理系统、摄像头,仿生龙虱外壳的相对两侧分别安装有水下磁吸机械足,空化清理系统密封安装于仿生龙虱外壳内部,空化清理系统包括水箱、喷射组件,水箱的一头通过前置水管连通至仿生龙虱外壳外部,喷射组件设置于水箱的另一头,喷射组件包括高压水泵、空化发生器、高压喷头,高压水泵至少设有一个,其入口分别通过一个后置水管与水箱连通,出口分别通过一个连接水管与空化发生器连接,高压喷头与空化发生器连接并穿设至仿生龙虱外壳外部,摄像头安装于仿生龙虱外壳外表面并靠近高压喷头。
3、进一步的,仿生龙虱外壳包括仿生上壳、仿生下壳,仿生上壳与仿生下壳对接构成龙虱型壳体,龙虱型壳体内部设有密封舱体,空化清理系统设置于密封舱体内,龙虱型壳体的一端设有进水孔,水箱上对应设有一进水口,前置水管一端与进水孔密封连接,另一端与进水口密封连接;龙虱型壳体的底部设有出水孔,高压喷头从出水孔中伸出至龙虱型壳体外部。
4、进一步的,水下磁吸机械足包括支撑基座、第一姿态臂、转动电机一、第二姿态臂、转动电机二、移动臂、转动电机三、磁吸圆盘、转动电机四,支撑基座与仿生龙虱外壳的一侧面固定,第一姿态臂的一端通过转动电机四与支撑基座铰接,第二姿态臂的一端通过转动电机一与第一姿态臂的另一端铰接,移动臂的一端通过转动电机二与第二姿态臂的另一端铰接,磁吸圆盘通过转动电机三与移动臂的另一端铰接。通过各机械臂间的配合完成机器人水下移动。
5、最佳的,水下磁吸机械足的数量为偶数个,在仿生龙虱外壳相对两侧依次对称间隔排列。
6、最佳的,磁吸圆盘为电磁感应吸盘,橡胶包裹电磁铁。
7、水下磁吸机械足末端连接磁吸圆盘,将机器人稳定姿态后开启电磁铁,使机器人吸附在船舶或海洋平台结构外表面,改变第一姿态臂与第二姿态臂之间的夹角,第一姿态臂绕支撑基座转动通过机械臂间的配合可以调整机器人的高度与姿态,姿态稳定后电磁铁断电,解除吸附,移动臂绕第二姿态臂转动,改变磁吸圆盘的位置,通电吸附,通过机械臂的组合运动实现机器人吸附在船舶或海洋平台结构外表面的移动。通过机器人前端安装的摄像头可上传影像画面,通过算法自主规划路径。
8、进一步的,空化发生器包括空化进水端、空化主体、空化出水端、支撑体、内筒壁、旋转孔,内筒壁同轴设置于空化主体内部,其外周面与空化主体内周面之间间隔设有多个用于隔离限位的支撑体,使内筒壁与空化主体之间形成旋转外腔,内筒壁内部为旋转内腔,内筒壁的周面上开设有多个旋转孔,空化进水端、空化出水端分别设置于空化主体的两端,高压水泵通过空化进水端与旋转外腔连通,高压喷头通过空化出水端与旋转内腔连通。
9、为使清洗的角度可调节,在高压喷头与出水管道之间使用球形接口连接,这使得高压喷头可以根据附着物的位置调整清洗的角度。
10、空化发生器为涡流型水力空化器,这是一种利用流体的旋转运动产生旋涡空化的装置,液体在旋转内腔高速旋转,导致旋转内腔中的液体压强小于汽化时的压力,使液体内部产生空泡,高压的水流首先充满空化发生器旋转外腔后,通过特殊形状的旋转孔进入旋转内腔,在旋转内腔内形成涡流后快速产生空腔,后续的高压水包裹空腔形成带有空泡的空化射流。由于从空化发生器到高压喷头的喷嘴是一个相对封闭的空间,压强不发生改变,空泡在该阶段不会爆炸溃灭。直至由喷嘴喷出后,外界水压增大,空泡由于液体的挤压溃灭,释放巨大能量,对附着物产生冲击,起到清理的作用。
11、进一步的,本机器人还包括控制主板,水下磁吸机械足、空化清理系统、摄像头分别与控制主板信号连接,控制主板连接操作终端。控制主板通过摄像头识别进行路径规划以及分析附着物,并可通过操作终端控制空化清洗强度。为了保证良好的行动能力,每个水下磁吸机械足臂单独装载单片机与控制主板电性连接。高压水泵至少设有一个,每个高压水泵为独立控制的,可控制高压水泵开关的个数调节清洗强度。
12、一种上述的仿生水下清理机器人的使用方法,包括以下步骤:
13、步骤一:移动;
14、启动机器人,机器人通过水下磁吸机械足在船舶或海洋平台结构物表面行走,摄像头拍摄到附着物后反馈信号,水下磁吸机械足吸附固定在结构物当前位置,使机器人固定,机器人再通过水下磁吸机械足调整仿生龙虱外壳位置,使高压喷头对准吸附物;
15、步骤二:清洗;
16、开启高压水泵将海水注入空化发生器,高压的海水在空化发生器内快速旋转形成涡流之后,在中心区域产生空腔,后续的高压海水包裹空腔形成带有空泡的空化射流,由高压喷头喷出,清洗附着物。
17、有益效果:与现有技术相比,本发明的优点是:
18、(1)本发明以水陆两栖动物龙虱为仿生样本,具有优异的水下行动能力。
19、(2)利用涡流型水力空化原理,实现在无污染物排放条件下的海洋附着物高效清理。
20、(3)本发明有着高度的自主性与智能性,可以大幅节约人力成本。与此同时,本方案对于清洗场景与环境要求不高,其便携性与传统的进船坞清洗节省大量时间成本。
技术特征:1.一种仿生水下清理机器人,其特征在于:包括机器人主体(1)、水下磁吸机械足(2),机器人主体(1)包括仿生龙虱外壳、空化清理系统(4)、摄像头(5),仿生龙虱外壳的相对两侧分别安装有水下磁吸机械足(2),空化清理系统(4)密封安装于仿生龙虱外壳内部,空化清理系统(4)包括水箱(4-2)、喷射组件,水箱(4-2)的一头通过前置水管连通至仿生龙虱外壳外部,喷射组件设置于水箱(4-2)的另一头,喷射组件包括高压水泵(4-4)、空化发生器(4-6)、高压喷头(4-7),高压水泵(4-4)至少设有一个,其入口分别通过一个后置水管(4-3)与水箱(4-2)连通,出口分别通过一个连接水管(4-5)与空化发生器(4-6)连接,高压喷头(4-7)与空化发生器(4-6)连接并穿设至仿生龙虱外壳外部,摄像头(5)安装于仿生龙虱外壳外表面并靠近高压喷头(4-7)。
2.根据权利要求1所述的一种仿生水下清理机器人,其特征在于:仿生龙虱外壳包括仿生上壳(3-1)、仿生下壳(3-2),仿生上壳(3-1)与仿生下壳(3-2)对接构成龙虱型壳体,龙虱型壳体内部设有密封舱体(3-5),空化清理系统(4)设置于密封舱体(3-5)内,龙虱型壳体的一端设有进水孔(3-3),水箱(4-2)上对应设有一进水口(4-1),前置水管一端与进水孔(3-3)密封连接,另一端与进水口(4-1)密封连接;龙虱型壳体的底部设有出水孔(3-4),高压喷头(4-7)从出水孔(3-4)中伸出至龙虱型壳体外部。
3.根据权利要求1所述的一种仿生水下清理机器人,其特征在于:水下磁吸机械足(2)包括支撑基座(2-1)、第一姿态臂(2-2)、转动电机一(2-3)、第二姿态臂(2-4)、转动电机二(2-5)、移动臂(2-6)、转动电机三(2-7)、磁吸圆盘(2-8)、转动电机四(2-9),支撑基座(2-1)与仿生龙虱外壳的一侧面固定,第一姿态臂(2-2)的一端通过转动电机四(2-9)与支撑基座(2-1)铰接,第二姿态臂(2-4)的一端通过转动电机一(2-3)与第一姿态臂(2-2)的另一端铰接,移动臂(2-6)的一端通过转动电机二(2-5)与第二姿态臂(2-4)的另一端铰接,磁吸圆盘(2-8)通过转动电机三(2-7)与移动臂(2-6)的另一端铰接。
4.根据权利要求3所述的一种仿生水下清理机器人,其特征在于:水下磁吸机械足(2)的数量为偶数个,在仿生龙虱外壳相对两侧依次对称间隔排列。
5.根据权利要求3所述的一种仿生水下清理机器人,其特征在于:磁吸圆盘(2-8)为电磁感应吸盘。
6.根据权利要求1所述的一种仿生水下清理机器人,其特征在于:空化发生器(4-6)包括空化进水端(4-6-1)、空化主体(4-6-2)、空化出水端(4-6-3)、支撑体(4-6-4)、内筒壁(4-6-5)、旋转孔(4-6-6),内筒壁(4-6-5)同轴设置于空化主体(4-6-2)内部,其外周面与空化主体(4-6-2)内周面之间间隔设有多个用于隔离限位的支撑体(4-6-4),使内筒壁(4-6-5)与空化主体(4-6-2)之间形成旋转外腔(4-6-8),内筒壁(4-6-5)内部为旋转内腔(4-6-7),内筒壁(4-6-5)的周面上开设有多个旋转孔(4-6-6),空化进水端(4-6-1)、空化出水端(4-6-3)分别设置于空化主体(4-6-2)的两端,高压水泵(4-4)通过空化进水端(4-6-1)与旋转外腔(4-6-8)连通,高压喷头(4-7)通过空化出水端(4-6-3)与旋转内腔(4-6-7)连通。
7.根据权利要求1所述的一种仿生水下清理机器人,其特征在于:还包括控制主板,水下磁吸机械足(2)、空化清理系统(4)、摄像头(5)分别与控制主板信号连接,控制主板连接操作终端。
8.一种如权利要求1~7任一所述的仿生水下清理机器人的使用方法,其特征在于包括以下步骤:
技术总结本发明公开了一种仿生水下清理机器人及其使用方法,仿生龙虱外壳的相对两侧分别安装有水下磁吸机械足,空化清理系统密封安装于仿生龙虱外壳内部,空化清理系统包括水箱、喷射组件,水箱的一头通过前置水管连通至仿生龙虱外壳外部,喷射组件包括高压水泵、空化发生器、高压喷头,高压水泵通过一个后置水管与水箱连通,空化发生器通过一个连接水管与高压水泵连接,高压喷头与空化发生器连接并穿设至仿生龙虱外壳外部,摄像头安装于仿生龙虱外壳外表面并靠近高压喷头。本发明在静水条件下主要依靠电磁吸附于船舱壁或海洋结构物表面,可针对性的对藻类、贝类、藤壶等不同强度的附着物,喷射不同强度的空化射流进行分级清理。技术研发人员:王睿,欧阳覃朗,邱旭,李梦雅,周欣伟,任鹏受保护的技术使用者:江苏科技大学技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240722/226048.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表