用于水下机器人布放回收的装置的制作方法
- 国知局
- 2024-08-01 07:12:28
本申请涉及水下机器人布放回收,具体而言,涉及一种用于水下机器人布放回收的装置。
背景技术:
1、随着水下机器人的广泛应用,对水下机器人的各项性能指标提出更高层次的要求。水下机器人的体积小,无法携带足够的能源,常常需要通过回收布放对水下机器人进行能源补给。
2、现有技术中,存在针对水下机器人的回收布放人工依赖性强、自动化程度低,以及水下机器人的回收布放效率低、回收布放效果不佳的技术问题。如何在水下作业少人化操作要求的前提下,更加高效的实现水下机器人安全布放和回收,一直是一个国内外普遍存在的共性难题。
3、在所述背景技术部分公开的上述信息仅用于加强对本申请的背景的理解,因此它可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、为了解决上述问题中的至少一个,本申请提出一种用于水下机器人布放回收的装置。
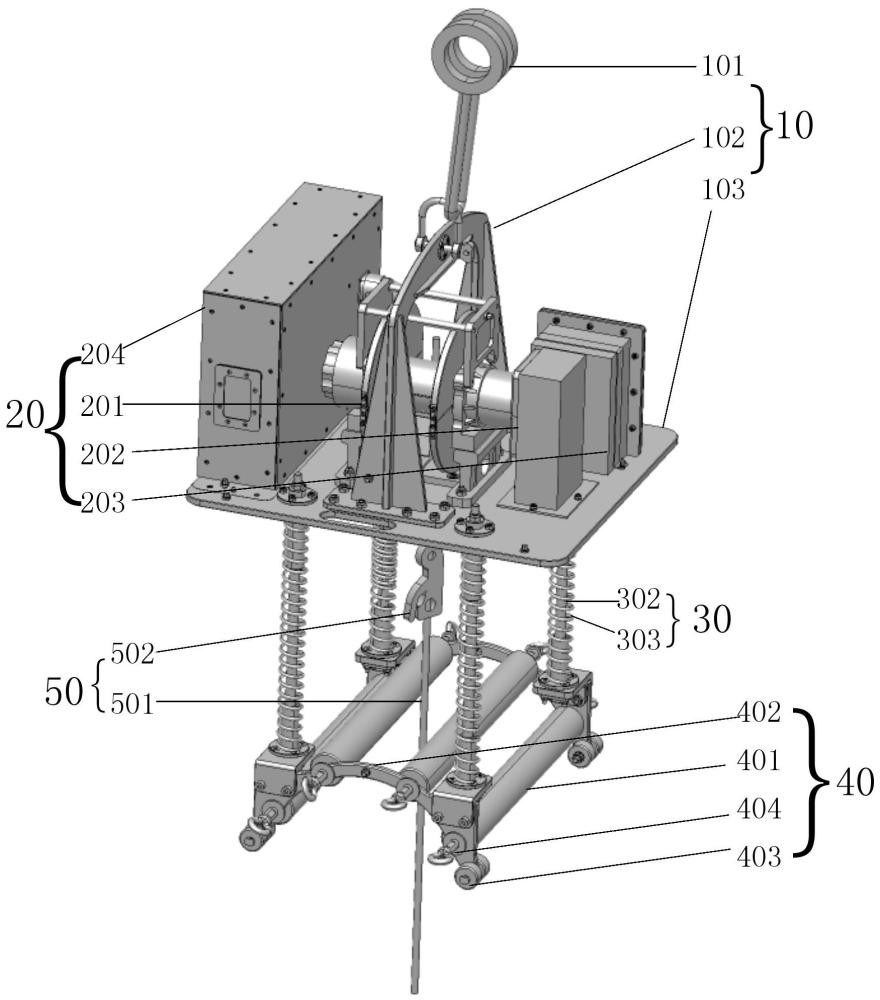
2、根据本申请的第一方面,本申请的至少一个实施例提供了一种用于水下机器人布放回收的装置,包括:吊装支架,用于与母船的吊装设备连接;主控单元,用于控制所述水下机器人的布放与回收;释力缓动单元,与所述吊装支架连接,用于在布放与回收所述水下机器人时,降低冲击力;固定单元,与所述释力缓动单元连接,用于在布放与回收所述水下机器人时,固定所述水下机器人;起吊单元,一端与所述主控单元连接,另一端与所述水下机器人连接,用于接收所述主控单元的控制指令,以布放或者回收所述水下机器人;并且所述起吊单元在布放或者回收所述水下机器人时,所述起吊单元与所述水下机器人的连接点在所述水下机器人重心的铅垂线上。
3、例如,在本申请的一些实施例中,所述吊装支架包括:连接绳,用于与所述母船的吊装设备连接;吊装主架,与所述连接绳连接;主支撑板,与所述吊装主架连接,所述主控单元设置于所述吊装主架与所述主支撑板形成的空间之中。
4、例如,在本申请的一些实施例中,所述主控单元包括:卷扬机,用于释放或者牵拉所述起吊单元,以使所述水下机器人布放或者回收;电机,与所述卷扬机连接,用于驱动所述卷扬机;微控制器,用于监测所述水下机器人的布放或者回收进程,并根据所述布放进程或者回收进程,输出控制信号至所述电机,以使其驱动所述卷扬机释放或者回收对应距离的所述起吊单元。
5、例如,在本申请的一些实施例中,所述主控单元还包括:供电电源,用于给所述卷扬机、所述电机和所述微控制器供电。
6、例如,在本申请的一些实施例中,所述主控单元还包括:防水密封舱,所述卷扬机、所述电机和所述微控制器设置于所述防水密封舱内。
7、例如,在本申请的一些实施例中,所述释力缓动单元包括:上导正套,与所述吊装支架连接;下导正套,与所述固定单元连接;滑动轴,与所述上导正套和所述下导正套连接,用于支撑所述水下机器人的重量和运动,以使所述水下机器人在布放和回收时平稳运行;弹簧,设置于所述滑动轴外部,用于吸收所述水下机器人布放和回收时的冲击能量,以使所述水下机器人平稳运行。
8、例如,在本申请的一些实施例中,所述固定单元包括:抱紧胶辊,用于在所述水下机器人布放和回收前,固定所述水下机器人;胶辊连接环,设置于所述抱紧胶辊的两端,用于连接多个抱紧胶辊。
9、例如,在本申请的一些实施例中,所述固定单元还包括:导正胶轮,设置于所述抱紧胶辊两端,用于在回收或者布放所述水下机器人时,使所述水下机器人滑入或者脱离所述抱紧胶辊。
10、例如,在本申请的一些实施例中,所述固定单元还包括:止荡绳连接环,设置于所述抱紧胶辊两端,用于连接止荡绳。
11、例如,在本申请的一些实施例中,所述起吊单元包括:缆绳,与所述主控单元连接,用于根据所述主控单元的控制指令,释放或者回收;脱钩器,一端与所述缆绳连接,另一端与所述水下机器人连接,以根据所述控制指令布放或者回收所述水下机器人。
12、本申请提供一种用于水下机器人布放回收的装置,通过微控制器检测确定缆绳的回拉和释放长度,提高自动化程度,从而与脱钩器配合,实现快速布放或者回收水下机器人,提高水下机器人的布放回收效率。
13、应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本申请。
技术特征:1.一种用于水下机器人布放回收的装置,其特征在于,包括:
2.如权利要求1所述的装置,其特征在于,所述主控单元还包括:
3.如权利要求1所述的装置,其特征在于,所述主控单元还包括:
4.如权利要求1所述的装置,其特征在于,所述固定单元还包括:
5.如权利要求1所述的装置,其特征在于,所述固定单元还包括:
技术总结本申请提供一种用于水下机器人布放回收的装置,涉及水下机器人布放回收技术领域,包括:吊装支架用于与母船的吊装设备连接;主控单元用于控制水下机器人的布放与回收;释力缓动单元与吊装支架连接用于在布放与回收水下机器人时降低冲击力;固定单元与释力缓动单元连接,用于在布放与回收水下机器人时固定水下机器人;起吊单元一端与主控单元连接,用于接收主控单元的控制指令以布放或者回收水下机器人;并且起吊单元在布放或者回收水下机器人时起吊单元与水下机器人的连接点在水下机器人重心的铅垂线上;通过微控制器检测确定缆绳的回拉和释放长度,提高自动化程度,实现快速布放或者回收水下机器人,提高水下机器人的布放回收效率。技术研发人员:芦斌,张鹏,祝雷雷,王振涛,宋丁,丁玉涛,杨广泽,侯越强受保护的技术使用者:深之蓝海洋科技股份有限公司技术研发日:20240516技术公布日:2024/6/30本文地址:https://www.jishuxx.com/zhuanli/20240722/226572.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表