一种水下机器人推进器
- 国知局
- 2024-08-01 07:21:03
本发明属于水下机器人,尤其涉及一种水下机器人推进器。
背景技术:
1、在对海洋进行探索时,一般会使用潜水员进行操作,但受到潜水员身体条件以及水深的限制,水下作业的时间以及效率都十分有限,随着水下机器人的出现,水下工作的进行更加便捷与安全;
2、作为水下机器人的动力来源,推进器的质量会直接影响到水下机器人在水下的运动情况,在浅水区域,推进器除了要承担推进作用,还需要面对来自水草的威胁,水草纠缠在推进器的螺旋桨上,会导致推进器的损坏,而目前大多数水下机器人由于体积限制,都不会设置专门的割刀,这就使得水下机器人推进器被水草缠住的可能性大大提升。
3、为此,我们提出来一种水下机器人推进器解决上述问题。
技术实现思路
1、本发明的目的是为了解决现有技术中水下机器人推进器容易被水草缠住的问题,而提出的一种水下机器人推进器。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种水下机器人推进器,包括曲杆与螺旋推进器,所述曲杆一端与螺旋推进器侧壁固定连接,所述曲杆背向螺旋推进器一侧侧壁开设有转动槽,所述转动槽中转动连接有摆动杆,所述摆动杆远离曲杆一端固定连接有伸长板,所述伸长板侧壁固定连接有若干割刀,所述摆动杆侧壁固定连接有套杆,所述套杆内安设有控制杆,所述控制杆远离套杆一端穿过曲杆侧壁,所述控制杆为中空设计,所述控制杆与套杆之间安设有用于连接二者的控制机构。
4、优选的,所述控制杆的纵截面为“l”形,所述控制杆的短边伸入曲杆中,所述控制杆的长边顶端固定连接有握把。
5、优选的,所述握把与控制杆内部连通,所述握把顶端安设有拉环,所述拉环底壁固定连接有拉绳,所述拉绳位于控制杆内部。
6、优选的,所述拉绳侧壁固定连接有固定板,所述固定板靠近握把一侧侧壁固定连接有弹簧,所述弹簧另一端与控制杆顶端固定连接,所述弹簧套设在拉绳外。
7、优选的,所述控制机构包括挡杆与套环,所述挡杆侧壁与拉绳远离拉环一端固定连接,所述控制杆侧壁开设有运动槽,所述挡杆与运动槽内壁滑动连接,所述套环固定连接在套杆内部,所述套杆靠近控制杆一端内壁开设有限制槽,所述挡杆位于限制槽中,所述套环与限制槽连通。
8、优选的,所述套环的纵截面为圆形,所述限制槽的纵截面为矩形,所述挡杆的纵截面也为矩形。
9、优选的,所述伸长板的纵截面为矩形,若干所述割刀均匀设置在伸长板不同于摆动杆的剩余侧壁上。
10、综上所述,本发明的技术效果和优点:
11、通过在曲杆侧壁设置转动槽、摆动杆、伸长板、割刀、套杆、控制杆、拉环、拉绳、弹簧、固定板、挡杆以及套环,使得工作人员可以在水下机器人尚未下水时,根据不同水域的水草分布情况,调节割刀的角度。更全面地保证螺旋推进器不会被水草缠住,解决了现有技术中水下机器人推进器容易被水草缠住的问题,而且由于割刀均匀分布在伸长板的多个侧壁上,使得割刀清理水草的效率更高,可以更好更快地清理水草。
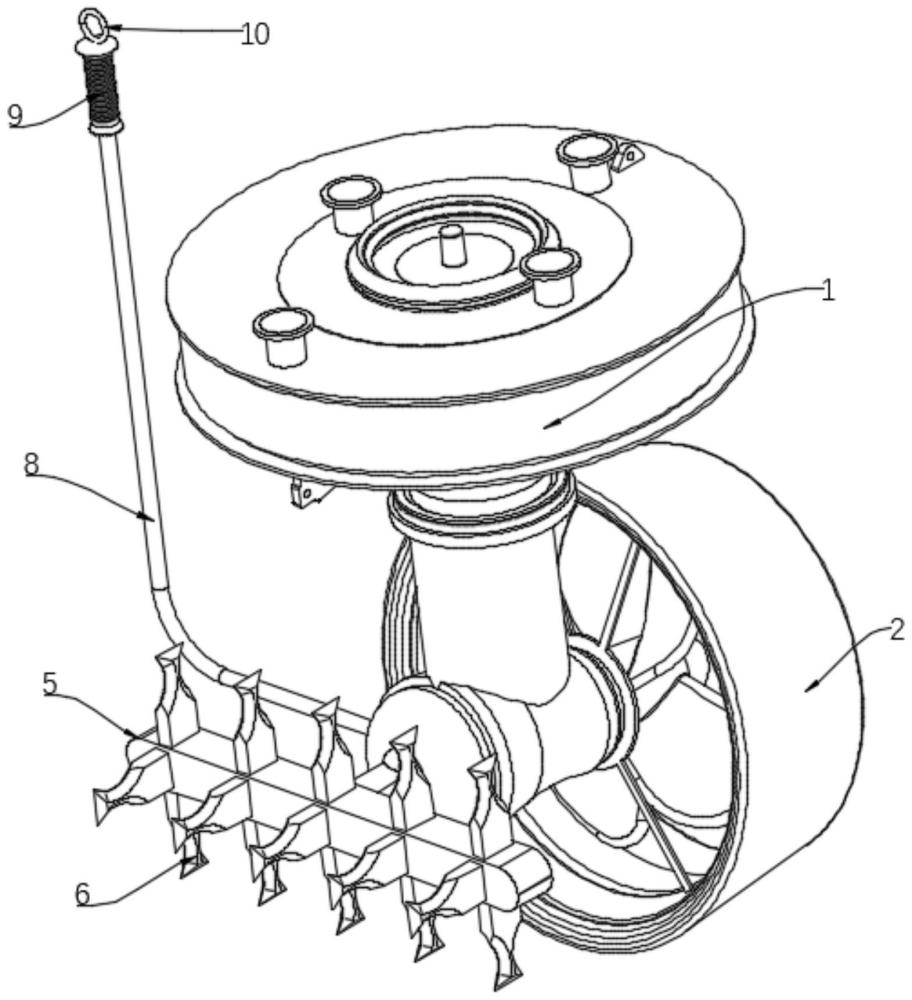
技术特征:1.一种水下机器人推进器,包括曲杆(1)与螺旋推进器(2),所述曲杆(1)一端与螺旋推进器(2)侧壁固定连接,其特征在于,所述曲杆(1)背向螺旋推进器(2)一侧侧壁开设有转动槽(3),所述转动槽(3)中转动连接有摆动杆(4),所述摆动杆(4)远离曲杆(1)一端固定连接有伸长板(5),所述伸长板(5)侧壁固定连接有若干割刀(6),所述摆动杆(4)侧壁固定连接有套杆(7),所述套杆(7)内安设有控制杆(8),所述控制杆(8)远离套杆(7)一端穿过曲杆(1)侧壁,所述控制杆(8)为中空设计,所述控制杆(8)与套杆(7)之间安设有用于连接二者的控制机构。
2.根据权利要求1所述的一种水下机器人推进器,其特征在于,所述控制杆(8)的纵截面为“l”形,所述控制杆(8)的短边伸入曲杆(1)中,所述控制杆(8)的长边顶端固定连接有握把(9)。
3.根据权利要求2所述的一种水下机器人推进器,其特征在于,所述握把(9)与控制杆(8)内部连通,所述握把(9)顶端安设有拉环(10),所述拉环(10)底壁固定连接有拉绳(11),所述拉绳(11)位于控制杆(8)内部。
4.根据权利要求3所述的一种水下机器人推进器,其特征在于,所述拉绳(11)侧壁固定连接有固定板(12),所述固定板(12)靠近握把(9)一侧侧壁固定连接有弹簧(13),所述弹簧(13)另一端与控制杆(8)顶端固定连接,所述弹簧(13)套设在拉绳(11)外。
5.根据权利要求3所述的一种水下机器人推进器,其特征在于,所述控制机构包括挡杆(14)与套环(15),所述挡杆(14)侧壁与拉绳(11)远离拉环(10)一端固定连接,所述控制杆(8)侧壁开设有运动槽(16),所述挡杆(14)与运动槽(16)内壁滑动连接,所述套环(15)固定连接在套杆(7)内部,所述套杆(7)靠近控制杆(8)一端内壁开设有限制槽(17),所述挡杆(14)位于限制槽(17)中,所述套环(15)与限制槽(17)连通。
6.根据权利要求5所述的一种水下机器人推进器,其特征在于,所述套环(15)的纵截面为圆形,所述限制槽(17)的纵截面为矩形,所述挡杆(14)的纵截面也为矩形。
7.根据权利要求1所述的一种水下机器人推进器,其特征在于,所述伸长板(5)的纵截面为矩形,若干所述割刀(6)均匀设置在伸长板(5)不同于摆动杆(4)的剩余侧壁上。
技术总结本发明公开了一种水下机器人推进器,属于水下机器人技术领域,包括曲杆与螺旋推进器,所述曲杆一端与螺旋推进器侧壁固定连接,所述曲杆背向螺旋推进器一侧侧壁开设有转动槽,所述转动槽中转动连接有摆动杆,所述摆动杆远离曲杆一端固定连接有伸长板,所述伸长板侧壁固定连接有若干割刀,所述摆动杆侧壁固定连接有套杆,所述套杆内安设有控制杆,所述控制杆远离套杆一端穿过曲杆侧壁,所述控制杆为中空设计,所述控制杆与套杆之间安设有用于连接二者的控制机构。在水下机器人下水之前,工作人员就可以转动控制杆,从而根据不同水域的水草分布情况,使得割刀转动到不同角度,尽可能保证水下机器人的正常行驶。技术研发人员:刘源,程磊,曹波,杨光平受保护的技术使用者:中国人民解放军陆军军事交通学院镇江校区技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240722/227205.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
声学释放器的制作方法
下一篇
返回列表