安全防坠型攀爬机器人
- 国知局
- 2024-08-01 07:54:48
【】本发明涉及攀爬机器人的,特别是安全防坠型攀爬机器人的。
背景技术
0、背景技术:
1、钢丝绳具有承载力强、柔韧性能好和抗拉强度高等特点,在港口起重、矿井提升、索道运输、电梯和吊桥等行业有着广泛的应用。攀爬机器人是一种可沿着钢丝绳等绳体攀爬的机器,能够根据实际工况需求替代工人沿着钢丝绳移动并进行勘测、检测、除尘和涂油等工作,如公开号为cn116142344a的发明专利所公开的一种多功能重载钢丝绳攀爬机器人、公告号为cn113428252b的实用新型专利所公开的缆索攀爬机器人以及公开号为cn105083407a的发明专利所公开的一种x-y双向无人遥控攀爬机器人。
2、攀爬机器人在完成预定的攀爬任务后,为了节约能源,在返回过程中,通常会采用电气装置并通过能耗制动的方式同步回收势能。也就是说,攀爬机器人的返回过程不仅不需要被额外供能,还能够自主将部分势能回收以实现绿色传动。但是,电气装置在使用中可能出现电气故障,导致能耗制动系统失效。这种失效可能引起攀爬机器人失速坠落并砸向地面,十分不安全。
技术实现思路
0、技术实现要素:
1、本发明的目的就是解决现有技术中的问题,提出安全防坠型攀爬机器人,能够主动轮和/或从动轮的旋转运动转化为导体切割磁感线的往复直线运动并形成阻止攀爬机器人下降的阻尼,从而对攀爬机器人的下降速度进行有效控制,提高攀爬机器人的使用安全性和使用可靠性。
2、为实现上述目的,本发明提出了安全防坠型攀爬机器人,包括机架、主动轮、从动轮、驱动机构、轮座、机械式电磁阻尼系统和中央控制器,所述主动轮和从动轮分别通过轮座而与机架间接连接且轮面可同时贴合所攀爬的绳体的柱面,所述主动轮由固定在机架之上的驱动机构驱动自转,所述驱动机构由中央控制器控制工作,所述机械式电磁阻尼系统包括单向棘轮机构和电磁阻尼机构,所述单向棘轮机构之中设有仅在攀爬机器人下降时随着主动轮和从动轮同步转动的棘轮,所述棘轮可在转动时带动电磁阻尼机构的导体沿着磁铁棒移动以切割磁感线并产生阻止攀爬机器人下降的阻力。
3、作为优选,所述电磁阻尼机构包括联杆、滑块、导体和磁铁棒,所述联杆的一端偏心铰接于棘轮之上而另一端与滑块相铰接,所述滑块可带动导体共同沿着磁铁棒滑移。
4、作为优选,所述电磁阻尼机构还包括隔套,所述滑块、导体、隔套和磁铁棒从外至内依次套设,所述隔套竖向连接在机架之上且与磁铁棒相固定。
5、作为优选,所述单向棘轮机构包括棘轮、法兰、拨销和内弹簧,所述棘轮的轮壁内侧设有阶梯式连续的轮廓线,所述法兰的一端与棘轮可转动式连接而另一端与主动轮和/或从动轮的轮轴同轴固定,若干根所述拨销环绕法兰设置,各根所述拨销的一端分别设有可抵靠轮廓线的台阶部的支撑平面以及可自由划过台阶部的过线弧面而另一端伸入棘轮之中并与内弹簧相连接,各根所述内弹簧分别具有推动所对应拨销伸出法兰的弹性趋势。
6、作为优选,所述法兰之上设有键槽,所述法兰通过插入键槽的键安装在主动轮和/或从动轮之上。
7、作为优选,所述轮座包括轴承、轴承套和轴承挡圈,所述主动轮和从动轮的轮轴分别通过轴承与轴承套可转动式连接,各个所述轴承的自由端均由轴承挡圈进行轴向定位,所述轴承套被弹力定位机构拉动以使所装配的主动轮或从动轮靠近绳体。
8、作为优选,所述弹力定位机构包括基轴和外弹簧,所述基轴的一端与轴承套相固定而另一端与机架相铰接,所述外弹簧的两端分别与轴承套和机架相固定且具有使主动轮或从动轮的轮面紧贴绳体的柱面的弹性趋势。
9、作为优选,所述机架包括上支撑板、下支撑板和立柱,所述上支撑板和下支撑板一上一下依次设置且分别设有可供绳体贯穿的上通孔和下通孔,所述上通孔和下通孔分别通过上切槽和下切槽贯穿上支撑板和下支撑板的外沿,若干根所述立柱分别固定在上支撑板与下支撑板之间。
10、作为优选,所述驱动机构包括电机、齿带和主动齿轮,所述主动齿轮同轴设置在电机的输出轴之上,所述主动轮的轮轴为阶梯轴且输入端的对应轴段之上设有齿廓,所述齿带分别套设在主动轮的轮轴以及主动齿轮之外。
11、作为优选,还包括回馈式制动系统,所述回馈式制动系统通过逆变器将攀爬机器人的势能回馈到畜电池内并进行储存。
12、本发明的有益效果:
13、1)通过采用单向棘轮机构和电磁阻尼机构共同构成机械式电磁阻尼系统,可仅在攀爬机器人下降时使单向棘轮机构的棘轮随着主动轮和/或从动轮同步转动,同时利用棘轮带动电磁阻尼机构的导体沿着磁铁棒移动以切割磁感线,从而将主动轮和/或从动轮的旋转运动转化为导体切割磁感线的往复直线运动并形成阻止攀爬机器人下降的阻尼,能够对攀爬机器人的下降速度进行有效控制,且一方面相较于气动阻尼和摩擦阻尼等阻尼器而言具有结构简单、紧凑和故障率低等优点,可有效减少或避免不必要的重量以提升攀爬机器人的续航能力,另一方面还有效解决了电气系统因电气故障而引起攀爬机器人快速下坠的安全隐患,有效提高了攀爬机器人的使用安全性和使用可靠性;
14、2)通过采用滑块装夹导体,又利用隔套将导体与磁铁棒相隔离,可有效避免导体和磁铁棒出现腐蚀、磨损现象,保证电磁阻尼机构的长时间正常使用,延长部件的使用寿命;
15、3)通过在机架与轮座之间增设由基轴和外弹簧共同构成的弹力定位机构,既可利用基轴提供主动轮和从动轮一定的角度调节自由性,又可利用外弹簧将主动轮和从动轮分别朝向绳体拉紧,从而保证攀爬机器人的正常上下移动。
16、本发明的特征及优点将通过实施例结合附图进行详细说明。
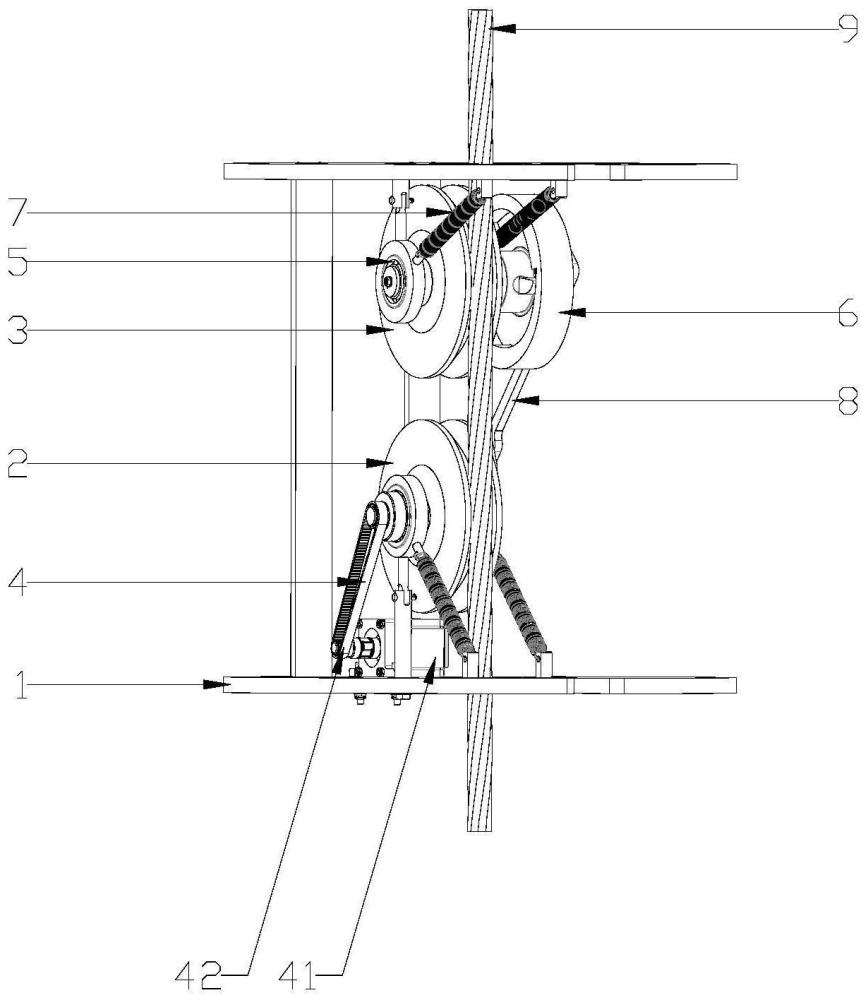
技术特征:1.安全防坠型攀爬机器人,其特征在于:包括机架(1)、主动轮(2)、从动轮(3)、驱动机构(4)、轮座(5)、机械式电磁阻尼系统和中央控制器,所述主动轮(2)和从动轮(3)分别通过轮座(5)而与机架(1)间接连接且轮面可同时贴合所攀爬的绳体(9)的柱面,所述主动轮(2)由固定在机架(1)之上的驱动机构(4)驱动自转,所述驱动机构(4)由中央控制器控制工作,所述机械式电磁阻尼系统包括单向棘轮机构(6)和电磁阻尼机构(8),所述单向棘轮机构(6)之中设有仅在攀爬机器人下降时随着主动轮(2)和从动轮(3)同步转动的棘轮(61),所述棘轮(61)可在转动时带动电磁阻尼机构(8)的导体(83)沿着磁铁棒(85)移动以切割磁感线并产生阻止攀爬机器人下降的阻力。
2.如权利要求1所述的安全防坠型攀爬机器人,其特征在于:所述电磁阻尼机构(8)包括联杆(81)、滑块(82)、导体(83)和磁铁棒(85),所述联杆(81)的一端偏心铰接于棘轮(61)之上而另一端与滑块(82)相铰接,所述滑块(82)可带动导体(83)共同沿着磁铁棒(85)滑移。
3.如权利要求2所述的安全防坠型攀爬机器人,其特征在于:所述电磁阻尼机构(8)还包括隔套(84),所述滑块(82)、导体(83)、隔套(84)和磁铁棒(85)从外至内依次套设,所述隔套(84)竖向连接在机架(1)之上且与磁铁棒(85)相固定。
4.如权利要求1所述的安全防坠型攀爬机器人,其特征在于:所述单向棘轮机构(6)包括棘轮(61)、法兰(62)、拨销(63)和内弹簧(64),所述棘轮(61)的轮壁内侧设有阶梯式连续的轮廓线(611),所述法兰(62)的一端与棘轮(61)可转动式连接而另一端与主动轮(2)和/或从动轮(3)的轮轴同轴固定,若干根所述拨销(63)环绕法兰(62)设置,各根所述拨销(63)的一端分别设有可抵靠轮廓线(611)的台阶部的支撑平面(631)以及可自由划过台阶部的过线弧面(632)而另一端伸入棘轮(61)之中并与内弹簧(64)相连接,各根所述内弹簧(64)分别具有推动所对应拨销(63)伸出法兰(62)的弹性趋势。
5.如权利要求4所述的安全防坠型攀爬机器人,其特征在于:所述法兰(62)之上设有键槽(621),所述法兰(62)通过插入键槽(621)的键安装在主动轮(2)和/或从动轮(3)之上。
6.如权利要求1所述的安全防坠型攀爬机器人,其特征在于:所述轮座(5)包括轴承(51)、轴承套(52)和轴承挡圈(53),所述主动轮(2)和从动轮(3)的轮轴分别通过轴承(51)与轴承套(52)可转动式连接,各个所述轴承(51)的自由端均由轴承挡圈(53)进行轴向定位,所述轴承套(52)被弹力定位机构(7)拉动以使所装配的主动轮(2)或从动轮(3)靠近绳体(9)。
7.如权利要求6所述的安全防坠型攀爬机器人,其特征在于:所述弹力定位机构(7)包括基轴(71)和外弹簧(72),所述基轴(71)的一端与轴承套(52)相固定而另一端与机架(1)相铰接,所述外弹簧(72)的两端分别与轴承套(52)和机架(1)相固定且具有使主动轮(2)或从动轮(3)的轮面紧贴绳体(9)的柱面的弹性趋势。
8.如权利要求1至所述的安全防坠型攀爬机器人,其特征在于:所述机架(1)包括上支撑板(11)、下支撑板(12)和立柱(13),所述上支撑板(11)和下支撑板(12)一上一下依次设置且分别设有可供绳体(9)贯穿的上通孔(111)和下通孔(121),所述上通孔(111)和下通孔(121)分别通过上切槽(112)和下切槽(122)贯穿上支撑板(11)和下支撑板(12)的外沿,若干根所述立柱(13)分别固定在上支撑板(11)与下支撑板(12)之间。
9.如权利要求1所述的安全防坠型攀爬机器人,其特征在于:所述驱动机构(4)包括电机(41)、齿带(42)和主动齿轮,所述主动齿轮同轴设置在电机(41)的输出轴之上,所述主动轮(2)的轮轴为阶梯轴且输入端的对应轴段之上设有齿廓,所述齿带(42)分别套设在主动轮(2)的轮轴以及主动齿轮之外。
10.如权利要求1至9中任一项所述的安全防坠型攀爬机器人,其特征在于:还包括回馈式制动系统,所述回馈式制动系统通过逆变器将攀爬机器人的势能回馈到畜电池内并进行储存。
技术总结本发明公开了安全防坠型攀爬机器人,包括机架、主动轮、从动轮、驱动机构、轮座、机械式电磁阻尼系统和中央控制器,所述主动轮和从动轮分别通过轮座而与机架间接连接且轮面可同时贴合所攀爬的绳体的柱面,所述主动轮由固定在机架之上的驱动机构驱动自转,所述驱动机构由中央控制器控制工作,所述机械式电磁阻尼系统包括单向棘轮机构和电磁阻尼机构,所述单向棘轮机构之中设有仅在攀爬机器人下降时随着主动轮和从动轮同步转动的棘轮,所述棘轮可在转动时带动电磁阻尼机构的导体沿着磁铁棒移动以切割磁感线并产生阻止攀爬机器人下降的阻力,能够对攀爬机器人的下降速度进行有效控制,提高攀爬机器人的使用安全性和使用可靠性。技术研发人员:王琪冰,吴大明,方贵盛,赵伟,佘昆,欧阳惠卿,周春明受保护的技术使用者:中国计量大学技术研发日:技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240722/229444.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。