一种球形机器人的制作方法
- 国知局
- 2024-08-01 07:55:11
本发明涉及机器人领域,尤其涉及一种利用电机驱动、利用喷管控制姿态的球形机器人。
背景技术:
1、机器人分为工业机器人和特种机器人,工业机器人是指向工业领域的多关节机械手或多自由度机器人,而特种机器人是除了特种机器人以外的、用于制造业并服务于人类的机器人,包括:服务机器人、水下机器人、娱乐机器人、军用机器人、农业机器人、探测机器人等等。特种机器人涉及到各个领域,用于各种目的,发展比较快,尤其是服务机器人。
2、球形机器人是一种特种机器人,球形机器人的驱动系统位于壳体内部,依靠球壳的滚动来运动的一类机器人,可以用于各种目的,例如探测、军工等等。球形机器人因为其外形是球形或者类球形的,所以可以在比较复杂的环境下工作,可以行驶在无人、沙尘、潮湿、腐蚀性的恶劣环境中,并具有水陆两栖功能,可用于行星探测、环境监测、国防装备、娱乐等领域。
3、因为球形机器人可以在比较复杂和崎岖的环境下行驶,各国都在积极研发球形机器人。例如京安公司研发的守望者球形机器人,该机器人是一个椭圆结构,整个机器人就像一个皮球一样,两端有透明的保护罩。该机器人主要依靠球壳内部的驱动机构实现滚动行走,驱动原理是偏心质量驱动法,即通过摆锤原理不断调整和改变球体的重心位置,从而产生偏心力矩是机器人向前或者向后滚动。守望者球形机器人平地最大滚动速度未20千米/小时,平地经济巡航速度为每小时5千米到8千米,最大巡航里程可以达到150公里,并且具备两栖作业的能力。又例如revolute robotics的混合移动机器人(hmr),采用具有一定程度可变形性的轻质骨骼作为骨架而非封闭结构,这种笼状球形结构更加轻便而且易于携带,不仅可以向任意方向滚动,并可以使用两个陀螺仪万向环像多旋翼飞行器一样低空飞行。但是守望者球形机器人利用偏心质量驱动法,行进速度比较慢;而revolute robotics的混合移动机器人虽然可以飞行,但是体积比较大,并且在地面上的行进速度也比较慢。
4、综上所述,球形机器人因为其球状外形,可以在比较复杂和崎岖的环境下行进,但是由于其驱动装置设置在其球体内部,所以行进速度比较慢,并且控制起来比较困难。
技术实现思路
1、技术问题
2、本发明的目的是提供一种球形机器人,采用外置滚轮驱动,利用喷管进行姿态控制,解决球形机器人速度慢、控制难等问题。
3、技术方案
4、本发明提供的一种球形机器人,它包括:
5、支架;
6、驱动装置,所述驱动装置包括滚轮、驱动电机,所述滚轮包括轮毂、第一齿轮,所述轮毂内部安装有一个内齿轮,所述内齿轮的轴线和所述滚轮的轴线一致,所述驱动电机安装在所述支架上,所述支架包括一个转动轴,所述第一齿轮滚动固定在所述转动轴上,所述驱动电机的转轴安装有转动齿轮,所述第一齿轮、驱动电机的转动齿轮、内齿轮的模数一致,所述驱动齿轮和所述内齿轮相啮合,所述第一齿轮和所述内齿轮相啮合,所述驱动装置的驱动电机通过齿轮为所述滚轮提供动力;
7、姿态控制装置,所述姿态控制装置包括增压装置、喷管、阀门,所述增压装置安装在所述支架上,所述增压装置包括出气口,所述喷管的一端和所述增压装置的出气口密封连接,所述阀门安装在所述喷管上,通过喷管喷射高压气流,调整球形机器人的姿态;
8、摄像头、姿态传感器、电机驱动、控制装置,所述控制装置包括信号接收模块、信号发送模块和信号处理模块,所述控制装置安装在所述支架上,所述姿态传感器、摄像头、电机驱动和所述控制装置通过线路或导线相连接,所述电机驱动通过导线和所述驱动电机相连接,所述阀门和所述控制装置通过导线相连接,所述控制装置控制所述阀门的开关,从而控制喷管喷射高压气流;
9、电池,所述电池安装在所述支架上,所述电池和所述控制装置通过导线相连接。
10、进一步地,它还包括弹跳装置,所述弹跳装置包括弹片、弹跳电机、拉绳、锁扣,所述弹片的一端固定在所述支架上,所述锁扣固定在支架上,所述拉绳的一端固定并缠绕在所述弹跳电机的转动轴上,所述拉绳的另一端固定在所述弹片的另一端,所述锁扣通过导线和所述控制装置相连接。弹跳电机可以将弹片收紧,当弹片位于一定位置时,弹片和所述锁扣锁死,当需要弹跳时,控制装置控制锁扣放开,弹片利用其弹力将球形机器人弹起。
11、进一步地,所述增压装置包括壳体、增压电机、涡扇,所述壳体固定在所述支架上,所述壳体包括进气口和出气口,所述增压电机和所述壳体固定,所述涡扇固定在所述增压电机的转动轴上,所述喷管和所述壳体的出气口密封连接,所述增压电机和所述的电机驱动通过导线相连接。增压电机通过涡扇给壳体内的气体增压,喷管和壳体密封连接,当打开喷管的阀门时,高压气体从喷管中喷射出去。
12、进一步地,它还包括一个陀螺仪,所述陀螺仪固定在所述支架上,所述陀螺仪和所述控制装置通过导线相连接,陀螺仪为球形机器人提供平衡。
13、进一步地,它还包括第二弹跳装置,所述第二弹跳装置包括第二弹跳电机、发条弹簧、重力锤、第二拉绳、第二锁扣,所述支架包括一个固定轴,所述发条弹簧的内圈固定在所述固定轴上,所述重力锤固定在所述发条弹簧的外圈,所述第二弹跳电机固定在所述支架上,所述第二拉绳的一端固定并缠绕在所述第二弹跳电机的转轴上,所述第二拉绳的另一端固定在所述发条弹簧的外圈,所述第二弹跳电机通过导线和所述电机驱动相连接,所述第二锁扣固定在所述支架上,所述第二锁扣和所述控制装置通过导线相连。第二弹跳装置利用重力锤的摆动,为球形机器人提供弹跳的动力。
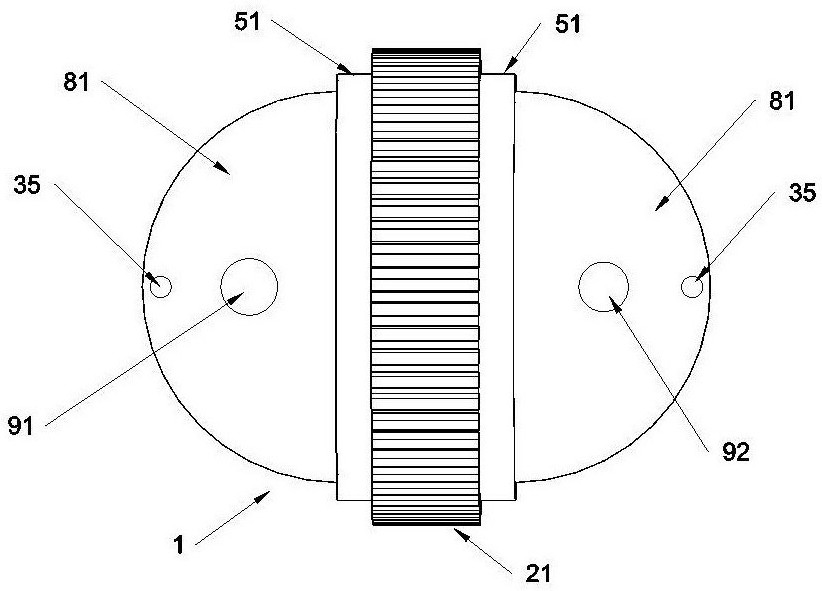
14、进一步地,它还包括两个保护罩,所述两个保护罩固定在所述支架上,所述两个保护罩分别安装在所述滚轮的两侧。保护罩保护球形机器人内部的部件。
15、进一步地,它还包括密封轴承,所述密封轴承的外圈固定在所述滚轮的轮毂上,所述密封轴承的内圈固定在所述支架上。密封轴承可以防止水和杂物进入到球形机器人的内部。
16、进一步地,所述阀门包括一个步进电机,所述步进电机通过导线和所述的电机驱动相连接。控制装置通过控制步进电机来控制阀门的开关。
17、进一步地,所述锁扣包括一个推拉式电磁铁,所述推拉式电磁铁通过导线和所述控制装置相连。当需要弹跳时,控制装置控制推拉式电磁铁,将锁扣打开。
18、进一步地,所述头部包括照明灯,所述照明灯固定在所述支架上,所述照明灯和所述电池相连,探照灯为球形机器人提供光源。
技术特征:1.一种球形机器人,其特征在于它包括:
2.根据权利要求1所述的一种球形机器人,其特征在于:它还包括弹跳装置,所述弹跳装置包括弹片、弹跳电机、拉绳、锁扣,所述弹片的一端固定在所述支架上,所述锁扣固定在支架上,所述拉绳的一端固定并缠绕在所述弹跳电机的转动轴上,所述拉绳的另一端固定在所述弹片的另一端,所述锁扣通过导线和所述控制装置相连接。
3.根据权利要求1所述的一种球形机器人,其特征在于:所述增压装置包括壳体、增压电机、涡扇,所述壳体固定在所述支架上,所述壳体包括进气口和出气口,所述增压电机和所述壳体固定,所述涡扇固定在所述增压电机的转动轴上,所述喷管和所述壳体的出气口密封连接,所述增压电机和所述的电机驱动通过导线相连接。
4.根据权利要求1所述的一种球形机器人,其特征在于:它还包括一个陀螺仪,所述陀螺仪固定在所述支架上,所述陀螺仪和所述控制装置通过导线相连接。
5.根据权利要求1所述的一种球形机器人,其特征在于:它还包括第二弹跳装置,所述第二弹跳装置包括第二弹跳电机、发条弹簧、重力锤、第二拉绳、第二锁扣,所述支架包括一个固定轴,所述发条弹簧的内圈固定在所述固定轴上,所述重力锤固定在所述发条弹簧的外圈,所述第二弹跳电机固定在所述支架上,所述第二拉绳的一端固定并缠绕在所述第二弹跳电机的转轴上,所述第二拉绳的另一端固定在所述发条弹簧的外圈,所述第二弹跳电机通过导线和所述电机驱动相连接,所述第二锁扣固定在所述支架上,所述第二锁扣和所述控制装置通过导线相连。
6.根据权利要求1所述的一种球形机器人,其特征在于:它还包括两个保护罩,所述两个保护罩固定在所述支架上,所述两个保护罩分别安装在所述滚轮的两侧。
7.根据权利要求1所述的一种球形机器人,其特征在于:它还包括密封轴承,所述密封轴承的外圈固定在所述滚轮的轮毂上,所述密封轴承的内圈固定在所述支架上。
8.根据权利要求1所述的一种球形机器人,其特征在于:所述阀门包括一个步进电机,所述步进电机通过导线和所述的电机驱动相连接。
9.根据权利要求1和权利要求2所述的一种球形机器人,其特征在于:所述锁扣包括一个推拉式电磁铁,所述推拉式电磁铁通过导线和所述控制装置相连。
10.根据权利要求1所述的一种球形机器人,其特征在于:所述头部包括照明灯,所述照明灯固定在所述支架上,所述照明灯和所述电池相连。
技术总结本发明公开了一种球形机器人,它包括驱动装置、姿态控制装置、弹跳装置。驱动装置包括支架、滚轮、驱动电机,滚轮包括轮毂、第一齿轮,轮毂内安装有内齿轮,驱动电机包括驱动齿轮,驱动齿轮和滚轮的内齿轮相啮合。姿态控制装置包括增压装置、喷管、阀门,增压装置包括出气口,喷管和出气口密封连接,弹跳装置包括弹片、弹跳电机、拉绳,弹片的一端固定在支架上,拉绳的一端固定在弹片的另一端,拉绳的另一端固定并缠绕在弹跳电机的转轴上。本发明公开的一种球形机器人,具有运动速度快,灵活等优点,适用于多种复杂环境下使用,并且可以利用弹跳装置越过障碍物。技术研发人员:赵罡受保护的技术使用者:赵勇技术研发日:技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240722/229468.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表