一种双侧膝关节耦合驱动的蓄力跳跃腿足及驱动方法
- 国知局
- 2024-08-01 08:07:53
本发明涉及四足机器人领域,特别是涉及一种双侧膝关节耦合驱动的蓄力跳跃腿足及驱动方法。
背景技术:
1、四足机器人由于自身灵活的自由度配置和精巧的机体结构,相较于轮式或履带式机器人它们能表现出更高的能量利用效率,因而能够代替人类进入复杂危险的环境中进行作业。然而,现有的四足机器人的后肢腿部通常由双关节连杆构成,其左右腿膝关节各自拥有一个自由度,所以膝关节的左右运动相互独立,如图10所示,但在对应跳跃步态的生物运动过程中,左右后肢的运动基本对称,时间上近似同步触地和离地,这使得四足机器人在跳跃步态下由于膝关节同时收缩和伸展的运动产生腿部自由度冗余,对于微小型四足机器人来说还存在装配尺寸过大等问题,进而掣肘了四足机器人的运动速度、能量效率等关键指标的提升。
技术实现思路
1、为解决以上技术问题,本发明提供一种双侧膝关节耦合驱动的蓄力跳跃腿足及驱动方法,解决了传统四足机器人在跳跃步态下由于左右腿膝关节独立运动引起的腿部自由度冗余、装配尺寸过大、能量效率低的问题。
2、为实现上述目的,本发明提供了如下方案:
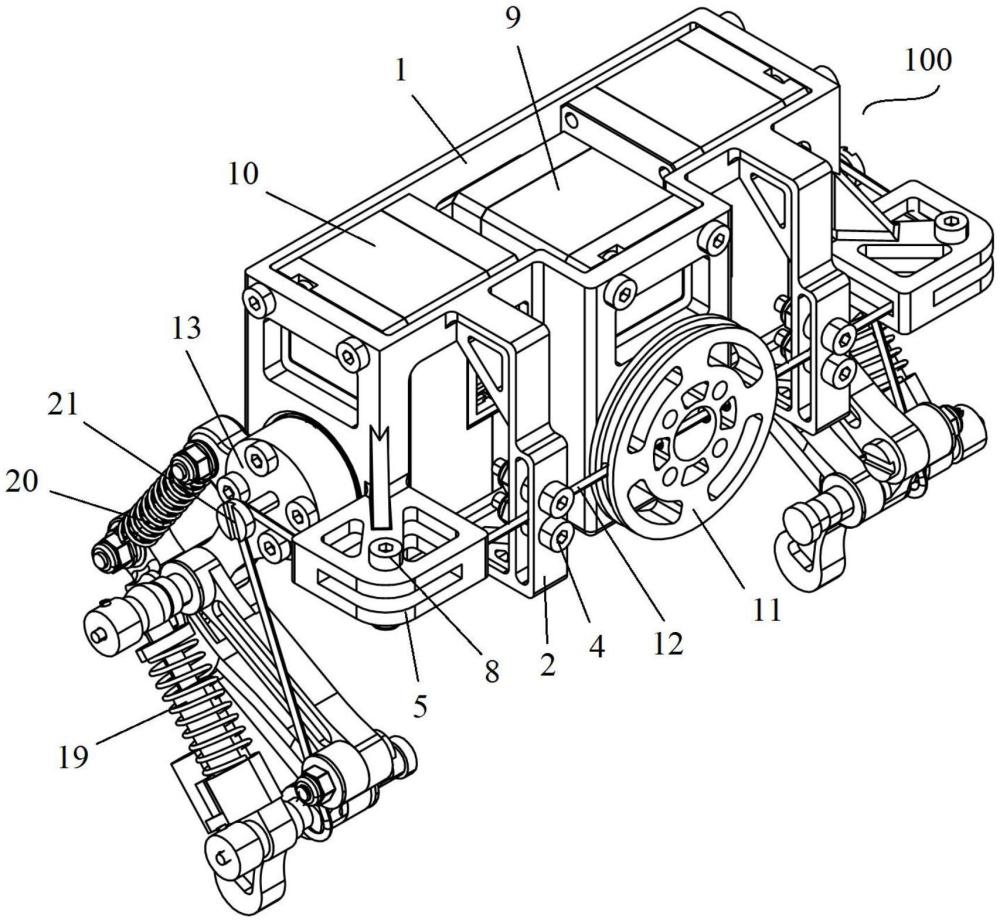
3、本发明提供一种双侧膝关节耦合驱动的蓄力跳跃腿足,包括后肢机架、双侧膝关节耦合驱动机构和两个对称设置于所述后肢机架左右两侧的后肢腿部机构,所述双侧膝关节耦合驱动机构包括第一旋转驱动部件、膝关节驱动轮和拉绳,所述第一旋转驱动部件设置于所述后肢机架的中部,所述第一旋转驱动部件用于驱动所述膝关节驱动轮转动,所述膝关节驱动轮上设置有沿径向贯穿两端的通道,所述拉绳设置于所述通道中且两端均伸至外部;所述后肢腿部机构包括第二旋转驱动部件、股骨连杆、第一胫骨连杆、第二胫骨连杆、跖骨连杆、第一连接轴、第二连接轴、第一弹性部件和第二弹性部件,所述第二旋转部件设置于所述后肢机架的一侧,所述第二旋转驱动部件用于驱动所述股骨连杆转动,所述股骨连杆、所述第一胫骨连杆的一端和所述第一弹性部件的一端通过所述第一连接轴铰接,所述第二胫骨连杆铰接于所述股骨连杆的底端,所述第二弹性部件的两端分别铰接于所述股骨连杆上部的一侧和所述第二胫骨连杆的一端,所述跖骨连杆的顶端铰接于所述第一胫骨连杆的另一端,所述第二胫骨连杆的另一端、所述跖骨连杆和所述第一弹性部件的另一端通过所述第二连接轴铰接,所述股骨连杆外侧的上部设置有导向部件,所述导向部件的中心轴线与所述第二旋转驱动部件的动力输出端的中心轴线共线设置,所述拉绳的各端均绕设于一个所述导向部件并连接于一个所述第二连接轴上,所述膝关节驱动轮旋转时能够实现所述拉绳的收起和释放。
4、优选地,还包括两个分别设置于所述膝关节驱动轮两侧的第一导向机构,所述第一导向机构包括第一导向块和两个由上至下依次设置于所述第一导向块上的第一导向组件,所述第一导向块设置于所述后肢机架上,所述第一导向块上设置有贯穿左右两侧的条形孔,所述第一导向组件包括第一导向螺栓、第一螺母和第一轴承,所述第一导向螺栓由所述第一导向块的一侧穿入,穿过所述条形孔伸至所述第一导向块的另一侧并安装有所述第一螺母,所述第一轴承安装于所述第一导向螺栓上并位于所述条形孔中,所述拉绳的一端由两个所述第一轴承之间穿过。
5、优选地,还包括两个第二导向机构,所述第二导向机构包括第二导向块和第二导向组件,各所述第二导向块均设置于一个所述第一导向块的外侧,所述第二导向块的内部设置有中空腔,且所述第二导向块上设置有供所述拉绳穿入和穿出的条形进孔和条形出孔,所述第二导向组件包括第二导向螺栓、第二螺母和第二轴承,所述第二导向螺栓由所述第二导向块的上侧穿入,穿过所述中空腔伸至所述第二导向块的下侧并安装有所述第二螺母,所述第二轴承安装于所述第二导向螺栓上并位于所述中空腔中,所述拉绳的一端由所述条形进孔进入绕设于所述第二轴承上并由所述条形出孔伸出。
6、优选地,所述第一旋转驱动部件的动力输出端的中心轴线与所述通道的中心轴线相交。
7、优选地,所述第一旋转驱动部件的动力输出端的轴线方向与所述第二旋转驱动部件的动力输出端的轴线方向相垂直。
8、优选地,所述第一旋转驱动部件为第一舵机,所述膝关节驱动轮固定于所述第一舵机的舵盘上,所述第二旋转驱动部件为第二舵机,所述股骨连杆的上部固定于所述第二舵机的舵盘上。
9、优选地,所述第一连接轴依次穿过所述股骨连杆、所述第一胫骨连杆的一端和所述第一弹性部件的一端并安装有第一止推环,所述第二连接轴依次穿过所述第二胫骨连杆的另一端、所述跖骨连杆和所述第一弹性部件的另一端并安装有第二止推环。
10、优选地,所述后肢腿部机构还包括第三轴承,所述第三轴承的内圈固定套设于所述第二连接轴上,所述拉绳的一端连接于所述第三轴承的外圈上。
11、优选地,所述第一弹性部件为压缩弹簧,所述第二弹性部件为拉伸弹簧。
12、本发明还一种双侧膝关节耦合驱动的蓄力跳跃腿足的驱动方法,包括以下步骤:处于第一状态时,所述第一旋转驱动部件的输出扭矩设为零,此时所述拉绳处于自然收紧状态,所述后肢腿部机构为释放状态;需要由第一状态转换为第二状态时,控制所述第一旋转驱动部件带动所述膝关节驱动轮转动,使得所述拉绳处于完全收紧状态,由于所述拉绳两端分别连接在两个所述第二连接轴上,使得所述跖骨连杆受到沿所述拉绳方向的拉力,所述第一弹性部件和所述第二弹性部件产生形变,从而实现所述后肢腿部机构的弹性蓄力过程;在跳跃步态下,通过控制所述第一旋转驱动部件和两个所述第二旋转驱动部件实现所述后肢腿部机构在摆动相阶段进行弹性蓄力,在支撑相阶段进行弹性释放的机器人跳跃动作,作为一个步态周期不断循环执行。
13、本发明相对于现有技术取得了以下技术效果:
14、本发明的双侧膝关节耦合驱动的蓄力跳跃腿足包括后肢机架、双侧膝关节耦合驱动机构和两个对称设置于后肢机架左右两侧的后肢腿部机构,双侧膝关节耦合驱动机构包括第一旋转驱动部件、膝关节驱动轮和拉绳,第一旋转驱动部件用于驱动膝关节驱动轮转动,膝关节驱动轮旋转时能够实现拉绳的收起和释放,以使得后肢腿部机构进行弹性蓄力与释放动作。本发明中提出的双侧膝关节耦合驱动方法,将原本独立的腿部摆动和弹性蓄力与释放过程以有限的驱动关联起来并产生运动叠加效果,解决了传统四足机器人在跳跃步态下由于左右腿膝关节独立运动引起的腿部自由度冗余、装配尺寸过大、能量效率低的问题,有助于提升四足机器人的运动速度、能量效率等关键指标。
技术特征:1.一种双侧膝关节耦合驱动的蓄力跳跃腿足,其特征在于,包括后肢机架、双侧膝关节耦合驱动机构和两个对称设置于所述后肢机架左右两侧的后肢腿部机构,所述双侧膝关节耦合驱动机构包括第一旋转驱动部件、膝关节驱动轮和拉绳,所述第一旋转驱动部件设置于所述后肢机架的中部,所述第一旋转驱动部件用于驱动所述膝关节驱动轮转动,所述膝关节驱动轮上设置有沿径向贯穿两端的通道,所述拉绳设置于所述通道中且两端均伸至外部;所述后肢腿部机构包括第二旋转驱动部件、股骨连杆、第一胫骨连杆、第二胫骨连杆、跖骨连杆、第一连接轴、第二连接轴、第一弹性部件和第二弹性部件,所述第二旋转部件设置于所述后肢机架的一侧,所述第二旋转驱动部件用于驱动所述股骨连杆转动,所述股骨连杆、所述第一胫骨连杆的一端和所述第一弹性部件的一端通过所述第一连接轴铰接,所述第二胫骨连杆铰接于所述股骨连杆的底端,所述第二弹性部件的两端分别铰接于所述股骨连杆上部的一侧和所述第二胫骨连杆的一端,所述跖骨连杆的顶端铰接于所述第一胫骨连杆的另一端,所述第二胫骨连杆的另一端、所述跖骨连杆和所述第一弹性部件的另一端通过所述第二连接轴铰接,所述股骨连杆外侧的上部设置有导向部件,所述导向部件的中心轴线与所述第二旋转驱动部件的动力输出端的中心轴线共线设置,所述拉绳的各端均绕设于一个所述导向部件并连接于一个所述第二连接轴上,所述膝关节驱动轮旋转时能够实现所述拉绳的收起和释放。
2.根据权利要求1所述的双侧膝关节耦合驱动的蓄力跳跃腿足,其特征在于,还包括两个分别设置于所述膝关节驱动轮两侧的第一导向机构,所述第一导向机构包括第一导向块和两个由上至下依次设置于所述第一导向块上的第一导向组件,所述第一导向块设置于所述后肢机架上,所述第一导向块上设置有贯穿左右两侧的条形孔,所述第一导向组件包括第一导向螺栓、第一螺母和第一轴承,所述第一导向螺栓由所述第一导向块的一侧穿入,穿过所述条形孔伸至所述第一导向块的另一侧并安装有所述第一螺母,所述第一轴承安装于所述第一导向螺栓上并位于所述条形孔中,所述拉绳的一端由两个所述第一轴承之间穿过。
3.根据权利要求2所述的双侧膝关节耦合驱动的蓄力跳跃腿足,其特征在于,还包括两个第二导向机构,所述第二导向机构包括第二导向块和第二导向组件,各所述第二导向块均设置于一个所述第一导向块的外侧,所述第二导向块的内部设置有中空腔,且所述第二导向块上设置有供所述拉绳穿入和穿出的条形进孔和条形出孔,所述第二导向组件包括第二导向螺栓、第二螺母和第二轴承,所述第二导向螺栓由所述第二导向块的上侧穿入,穿过所述中空腔伸至所述第二导向块的下侧并安装有所述第二螺母,所述第二轴承安装于所述第二导向螺栓上并位于所述中空腔中,所述拉绳的一端由所述条形进孔进入绕设于所述第二轴承上并由所述条形出孔伸出。
4.根据权利要求1所述的双侧膝关节耦合驱动的蓄力跳跃腿足,其特征在于,所述第一旋转驱动部件的动力输出端的中心轴线与所述通道的中心轴线相交。
5.根据权利要求1所述的双侧膝关节耦合驱动的蓄力跳跃腿足,其特征在于,所述第一旋转驱动部件的动力输出端的轴线方向与所述第二旋转驱动部件的动力输出端的轴线方向相垂直。
6.根据权利要求1所述的双侧膝关节耦合驱动的蓄力跳跃腿足,其特征在于,所述第一旋转驱动部件为第一舵机,所述膝关节驱动轮固定于所述第一舵机的舵盘上,所述第二旋转驱动部件为第二舵机,所述股骨连杆的上部固定于所述第二舵机的舵盘上。
7.根据权利要求1所述的双侧膝关节耦合驱动的蓄力跳跃腿足,其特征在于,所述第一连接轴依次穿过所述股骨连杆、所述第一胫骨连杆的一端和所述第一弹性部件的一端并安装有第一止推环,所述第二连接轴依次穿过所述第二胫骨连杆的另一端、所述跖骨连杆和所述第一弹性部件的另一端并安装有第二止推环。
8.根据权利要求1所述的双侧膝关节耦合驱动的蓄力跳跃腿足,其特征在于,所述后肢腿部机构还包括第三轴承,所述第三轴承的内圈固定套设于所述第二连接轴上,所述拉绳的一端连接于所述第三轴承的外圈上。
9.根据权利要求1所述的双侧膝关节耦合驱动的蓄力跳跃腿足,其特征在于,所述第一弹性部件为压缩弹簧,所述第二弹性部件为拉伸弹簧。
10.一种如权利要求1-9中任一项所述的双侧膝关节耦合驱动的蓄力跳跃腿足的驱动方法,其特征在于,包括以下步骤:处于第一状态时,所述第一旋转驱动部件的输出扭矩设为零,此时所述拉绳处于自然收紧状态,所述后肢腿部机构为释放状态;需要由第一状态转换为第二状态时,控制所述第一旋转驱动部件带动所述膝关节驱动轮转动,使得所述拉绳处于完全收紧状态,由于所述拉绳两端分别连接在两个所述第二连接轴上,使得所述跖骨连杆受到沿所述拉绳方向的拉力,所述第一弹性部件和所述第二弹性部件产生形变,从而实现所述后肢腿部机构的弹性蓄力过程;在跳跃步态下,通过控制所述第一旋转驱动部件和两个所述第二旋转驱动部件实现所述后肢腿部机构在摆动相阶段进行弹性蓄力,在支撑相阶段进行弹性释放的机器人跳跃动作,作为一个步态周期不断循环执行。
技术总结本发明公开一种双侧膝关节耦合驱动的蓄力跳跃腿足及驱动方法,涉及四足机器人领域,包括后肢机架、双侧膝关节耦合驱动机构和两个对称设置于后肢机架左右两侧的后肢腿部机构,双侧膝关节耦合驱动机构包括第一旋转驱动部件、膝关节驱动轮和拉绳,第一旋转驱动部件用于驱动膝关节驱动轮转动,膝关节驱动轮旋转时能够实现拉绳的收起和释放,以使得后肢腿部机构进行弹性蓄力与释放动作。本发明中提出的双侧膝关节耦合驱动方法,将原本独立的腿部摆动和弹性蓄力与释放过程以有限的驱动关联起来并产生运动叠加效果,解决了传统四足机器人在跳跃步态下由于左右腿膝关节独立运动引起的腿部自由度冗余、装配尺寸过大、能量效率低的问题。技术研发人员:石青,杜鎔杰,王若超,秦博扬受保护的技术使用者:北京理工大学技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240722/230500.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
车身组件、车辆的制作方法
下一篇
返回列表