花粉智能监测分析系统及其控制方法
- 国知局
- 2024-07-30 11:04:21
本发明涉及花粉监测领域,具体涉及一种花粉智能监测分析系统及其控制方法。
背景技术:
1、花期中的植物会产生花粉,花粉粒直径15~30μm,量大且质轻,易附着于气溶胶上随空气飘散传播,一般称为气传花粉。气传花粉中的致敏性蛋白成分被人体吸入后会出现流鼻涕、眼泪、皮肤瘙痒、哮喘等花粉过敏症状。
2、现有技术中出现了采用花粉在线监测系统(cn201510731452.1)对花粉进行监测,以花粉种类及数量,以提醒相关气象部门发布相关预警提醒以及采取措施减少花粉漂浮,实现指导有花粉过敏的人群减少在花粉指数较高的地区活动,减轻过敏症状。
3、现有的花粉在线监测系统在进行花粉采集时,其采用采样膜带对花粉采样,之后采用类似传送带的方式将采样膜带输送至显微镜处进行拍照,之后左边转轴把收集并观察过含花粉样品的膜带卷起。通过该种方式虽能够实现花粉的在线监测,但是采用传送带的传输方式进行采样膜带输送时,会存在抖动,若花粉在采样膜带上采集比较密集,会使花粉抖动至采样膜带上相邻的两个采样区域,从而影响花粉浓度的精细化采集。拍照完成的采样膜带被卷起,膜带上的花粉会相互干扰,使得采样膜带不能回收,在采集的数据存在疑义时不能进行溯源。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的花粉智能监测分析系统及其控制方法解决了现有的花粉监测装置采用采样膜带进行花粉传输存在抖动致使花粉浓度监测不准确的问题。
2、为了达到上述发明目的,本发明采用的技术方案为:
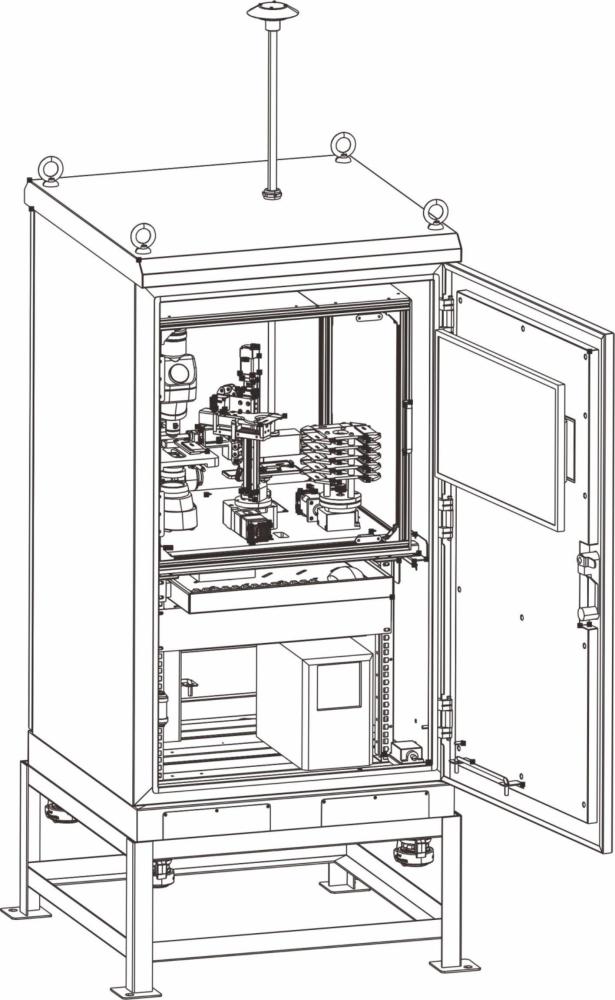
3、第一方面,提供一种花粉智能监测分析系统,包括监测箱,监测箱内设置有控制模块和支撑平台,支撑平台上安装有用于存放多块相互不重叠的载玻片的玻片存放架、用于吸入外部环境空气,通过容量法将空气中的花粉采集至其内部的载玻片上的花粉采样组件、将载玻片上的花粉图像放大后,进行图像采集的图像采集装置以及用于抓取玻片存放架上的载玻片并移动至花粉采样组件和图像采集装置上的载玻片转运机构;
4、玻片存放架设置于旋转机构上,图像采集装置上设置有用于对载玻片在xyz三个方向进行调整的微调机构;旋转机构、花粉采样组件、图像采集装置、载玻片转运机构和微调机构均与控制模块连接,控制模块用于控制与其连接的部件的启停及对图像采集装置上传的图像进行识别得到花粉的浓度和/或花粉数量,并将图像及浓度和/或花粉数量发送给外部管理端。
5、进一步地,花粉采样组件包括底板及通过玻片罩和缓冲板扣合形成的花粉采样室,底板上安装有沿竖直方向延伸的立板,玻片罩固定于立板上,且玻片罩下方的立板上设置有与缓冲板滑动配合的线性导轨,底板上安装有带着缓冲板与玻片罩扣合/分离的贯通式步进电机;
6、缓冲板的内表面安装有相对缓冲板沿x轴方向滑动的玻片放置台;玻片罩上固定有带着玻片放置台滑动的驱动机构;玻片罩的顶部连通有延伸出监测箱、以将外界空气引入并撞击载玻片的进气管,玻片罩的侧壁上安装有与抽风机连接的抽气孔;贯通式步进电机和驱动机构均与控制模块电连接。
7、进一步地,缓冲板的下表面通过多根光轴螺钉连接有一块施压板,施压板上供光轴螺钉穿过的孔的直径大于光轴螺钉的直径;施压板与贯通式步进电机的丝杆固定连接,且施压板与缓冲板之间的光轴螺钉上套装有弹簧。
8、进一步地,驱动机构包括固定于玻片罩侧壁外表面的驱动电机,驱动电机的丝杆轴经过密封板穿入玻片罩内,丝杆轴上套装有丝杆螺母ⅰ,且丝杆螺母ⅰ具有向着缓冲板方向竖直延伸的限位板;玻片放置台的侧面设置有一条限位槽,当缓冲板与玻片罩扣合时,限位板延伸至限位槽内;驱动电机与控制模块电连接。
9、进一步地,载玻片转运机构包括手爪和带动手爪做360°旋转的旋转台,旋转台上固定有支撑块,支撑块上安装有带动手爪在竖直方向升降的第一升降机构,第一升降机构上设置有升降台,升降台上安装有带动手爪在水平面上做直线运动的第一移动机构,旋转台、第一升降机构和第一移动机构均与控制模块连接。
10、进一步地,手爪包括固定于第一移动机构上的板状体,板状体的非安装端分叉并呈u形;u形的两条臂分叉为至少两条用于托起载玻片的延伸条,最外侧的延伸条上开设有与载玻片边缘接触的l形槽;非最外侧的延伸条上开设有长度等于载玻片最大宽度、用于托起载玻片的容纳槽。
11、进一步地,图像采集装置包括未设置目镜的显微镜,显微镜用于目镜的安装位置处安装有与控制模块电连接的相机,微调机构安装于显微镜的镜臂上;
12、微调机构包括玻片承载架、呈l形的滑台及固定于镜臂上、用于带着显微镜的载物台在z轴升降的第二升降机构;滑台的短边设置有与其长边平行的凸台,凸台位于载物台下表面开设的沿y轴方向的滑槽内,滑台长边的安装板从载物台的侧面向上延伸,且其顶面位于载物台的上方;
13、滑台固定于镜臂上的第二移动机构上,并通过第二移动机构在滑槽内滑动;安装板朝向载物台的侧面上固定有带着玻片承载架沿x轴方向滑动的第三移动机构。
14、进一步地,玻片承载架包括呈l形的滑板,滑板短边的板体固定于第三移动机构的丝杆螺母ⅱ上,其长边的板体沿着第三移动机构的丝杆长度方向延伸,并在其上固定安装有具有两条悬臂的托板,悬臂上开设有卡装载玻片的卡槽。
15、进一步地,控制模块包括相互连接的微型主机和电气箱,旋转机构、花粉采样组件、图像采集装置、载玻片转运机构和微调机构均与电气箱和备用电源连接;微型主机内部内嵌有用于对旋转机构、花粉采样组件、图像采集装置、载玻片转运机构和微调机构进行控制的执行程序;微型主机与监测箱内放置的输入模块连接,输入模块用于对内嵌的执行程序进行调整;监测箱的门板的内侧面固定有与微型主机电连接的显示器。
16、进一步地,监测箱内还设置有温度传感器、湿度传感器、将监测箱内部温度恒定在预设温度的空调和当监测箱内部湿度大于预设湿度时,进行除湿的除湿机,温度传感器、湿度传感器、空调和除湿机均与控制模块电连接。
17、第二方面,提供一种花粉智能监测分析系统的控制方法,其包括步骤:
18、c1、判断花粉采样组件是否完成至少一片载玻片的花粉采集,若是,则进入步骤c2,否则进入步骤c4;
19、c2、读取花粉采样组件中载玻片的采样区域数量及最后一个采样区域的采样时长,计算最后一个采样区域的截止采样时间与总采样时间的截止时间之间的差值;
20、c3、当差值等于零时,打开花粉采样组件,将完成花粉采集的载玻片移动至玻片存放架上初始存放其的位置处,之后进入步骤c4,当差值大于零时,进入步骤c4;
21、c4、在待采样载玻片的采样起始时间时,读取待采样载玻片的序号,并启动旋转机构使玻片存放架上对应序号的载玻片转动至载玻片转运机构的抓取侧;
22、c5、启动载玻片转运机构抓取对应序号的载玻片,并将其移动至打开的花粉采样组件内部,关闭花粉采样组件;
23、c6、花粉采样组件根据载玻片上的采样区域数量及每个采样区域的采样时长,移动载玻片上的采样区域对准空气进口,抽吸空气撞击载玻片对应区域进行花粉采样。
24、进一步地,花粉智能监测分析系统的控制方法还包括:
25、d1、判断上一块已完成花粉采集的载玻片是否位于载玻片转运机构的抓取侧,若是,进入步骤d3;否则进入步骤d2;
26、d2、启动旋转机构旋转玻片存放架,使上一块已完成花粉采集的载玻片旋转至载玻片转运机构的抓取侧;
27、d3、抓取上一块已完成花粉采集的载玻片,并将其转运至图像采集装置处,依次对载玻片的每个采样区域进行多张图像信息采集;
28、d4、当载玻片的每个采样区域均已完成多张图像信息采集时,将载玻片移动至玻片存放架上初始存放其的位置处。
29、进一步地,花粉智能监测分析系统的控制方法还包括自适应调整进入花粉采样组件内的空气流量:
30、e1、在抽风机向花粉采样组件输送空气过程中,采集花粉采样组件进风口处的流量值;
31、e2、判断流量值是否在预设流量范围内,若是,进入步骤e7,否则进入步骤e3;
32、e3、根据流量值,计算pid控制器中的流量误差值 e,流量误差累计值 i和流量误差变化速率 d:
33、 e= s- f, i= i0+ e, d= e- p
34、其中, s为流量预设阈值; f为流量值; p为上次的流量误差值; i0为上一次流量判断时对应的流量误差累计值;
35、e4、根据流量误差值,调整pid控制器中对应于流量的比例系数 ql、积分系数 ul和微分系数 wl:
36、当e<1时, ql= ql0, ul= ul0, wl= wl0*0.5;当e≥1时, ql= ql0*2, ul= ul0, wl= wl0;
37、其中, ql0为比例系数阈值; ul0为积分系数阈值; wl0为微分系数阈值;
38、e5、根据 e、 i和 d及 ql、 ul和 wl,更新pid控制器对应于流量的输出值 outl:
39、 outl= ql* e+ ul* i+ wl* d
40、e6、根据输出值 outl,调整抽风机的输出功率,使进风口处的流量值位于预设流量范围内,之后在预设时间后,返回步骤e1;
41、e7、对流量误差值 e清零,之后在预设时间后,返回步骤e1。
42、进一步地,花粉智能监测分析系统的控制方法还包括载玻片上花粉采样防堆叠方法:
43、s1、获取当前载玻片每个采样区域的多张图像信息,并对图像进行预处理,得到灰度图像,当前载玻片为最近一块已完成花粉采样的载玻片;
44、s2、计算灰度图像中每个像素点的灰度值,并根据灰度值确定每个采样区域中黑色区域内像素点的计数值;
45、s3、判断当前载玻片所有采样比例是否都大于1或者当前载玻片的采样区域数量是否小于初始采样区域总数量,若是,则进入步骤s6,否则,进入步骤s4;
46、s4、根据每个采样区域的计数值,更新pid控制器的输出out1,并更新采样比例pr=采样比例pr+out1;
47、s5、当pr≥1时,下一块载玻片对应采样区域的采样时长等于当前载玻片的采样停留时长,当pr<1时,下一块载玻片对应采样区域的采样时长=ts×pr;
48、s6、选取当前载玻片的所有采样区域的计数值中的最大值作为堆叠度反馈值;
49、s7、根据堆叠度反馈值,更新pid控制器的输出out2,并更新采样区域数量st=st+int(out2),int为取整函数;
50、s8、根据单块载玻片的总采样时间cy和采样区域数量st,更新下一块载玻片采样区域的采样停留时长ts=cy/st,每个采样区域的采样时长等于ts。
51、本发明的有益效果为:本方案在进行花粉采集时采用载玻片进行花粉的采集,再配合载玻片转运机构抓取载玻片的方式进行载玻片的转移,在转运过程中采用夹持的方式进行单张载玻片的转移,在转移过程中不存在抖动,可以避免花粉进入相邻的两个采样区域,从而保证了花粉浓度和数量检测的精度。
52、本方案将完成图像采集的载玻片放置于玻片存放架上,载玻片之间不存在重叠的情况,载玻片上的花粉不会相互影响,可以实现载玻片的回收和存放,在后续科研中发现数据异常时,可以查找采集时的载玻片,方便溯源。
53、本方案采用玻片罩和缓冲板形成花粉采样室,结合贯通式步进电机能够快速地实现缓冲板的升降,以实现载玻片的快速放入和取出;当缓冲板与玻片罩完全接触后,继续运动的贯通式步进电机会带着施压板继续向上运动,压缩弹簧产生的弹力可以对缓冲板施加一定的压力,以提高花粉采样室的密封性,从而避免外部空气泄露对已采样本造成污染,以及使喷口处实际流量小于设定值。
本文地址:https://www.jishuxx.com/zhuanli/20240730/155349.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表