车辆控制方法、系统、电子设备及存储介质与流程
- 国知局
- 2024-07-31 23:47:34
本技术涉及车辆控制,尤其涉及一种车辆控制方法、系统、电子设备及存储介质。
背景技术:
1、随着科学技术的发展以及经济水平的提升,车辆的使用范围也越来越广。
2、目前,对于厂区内或者一定范围内无道路标线的区域内,如果想实现将车辆从一个固定点移动到另一个固定点一般都是采用人工移车。以4s店提供维保服务为例,在用户进行车辆保养时,通常先将车停靠在4s店维修点附近的固定停车位,业务员在确认保养范围开具单据后会人工驾驶用户车辆将开到空闲的维修点进行维修保养,维修工在完成维修保养后通知业务员,业务员再将车辆从维修点开到园区出口处的固定停车位停放,再通知用户取车。在此过程中,用户将车停到固定的a点后,业务员将车移动到固定的维修点b,再停到出口的停车场停车位c点,实际上从a到b,到c属于固定的点对点的移动。整个过程都需要人员操作,无疑会增加较大的人力成本和时间成本。
技术实现思路
1、本技术实施例提供一种车辆控制方法、系统、电子设备及存储介质,以解决相关技术中在固定场景中业务员移车的方式,增加了较大的人力成本和时间成本的问题。
2、为了解决上述技术问题,本技术实施例是这样实现的::
3、第一方面,本技术实施例提供了一种车辆控制方法,应用于服务器,所述方法包括以下步骤:
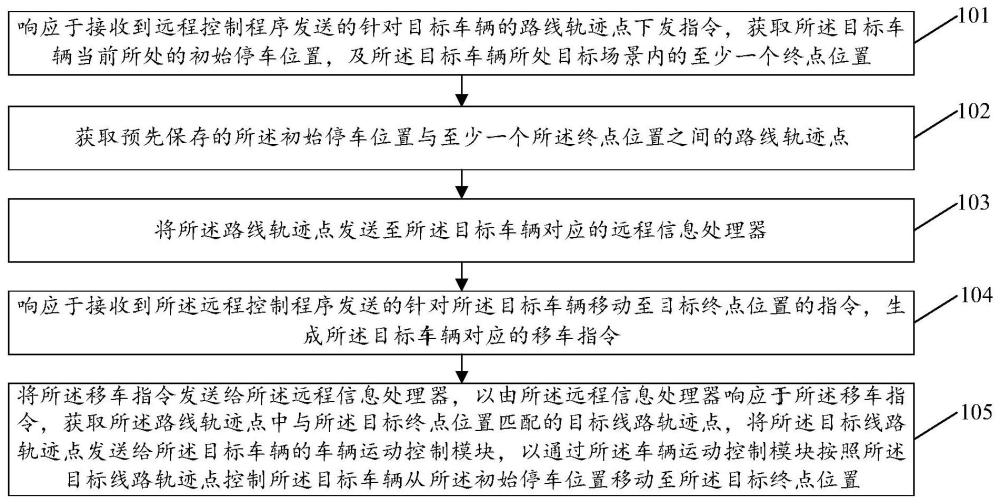
4、响应于接收到远程控制程序发送的针对目标车辆的路线轨迹点下发指令,获取所述目标车辆当前所处的初始停车位置,及所述目标车辆所处目标场景内的至少一个终点位置;
5、获取预先保存的所述初始停车位置与至少一个所述终点位置之间的路线轨迹点;
6、将所述路线轨迹点发送至所述目标车辆对应的远程信息处理器;
7、响应于接收到所述远程控制程序发送的针对所述目标车辆移动至目标终点位置的指令,生成所述目标车辆对应的移车指令;
8、将所述移车指令发送给所述远程信息处理器,以由所述远程信息处理器响应于所述移车指令,获取所述路线轨迹点中与所述目标终点位置匹配的目标线路轨迹点,将所述目标线路轨迹点发送给所述目标车辆的车辆运动控制模块,以通过所述车辆运动控制模块按照所述目标线路轨迹点控制所述目标车辆从所述初始停车位置移动至所述目标终点位置。
9、可选地,在所述获取所述目标车辆当前所处的初始停车位置,及所述目标车辆所处目标场景内的至少一个终点位置之前,还包括以下步骤:
10、获取所述目标场景内的至少一个停车位置;所述至少一个停车位置包括所述初始停车位置;
11、针对每个所述停车位置,通过测试车辆获取所述停车位置与所述至少一个终点位置之间的路线轨迹点。
12、可选地,所述通过测试车辆获取所述停车位置与所述至少一个终点位置之间的路线轨迹点,包括以下步骤:
13、控制所述测试车辆以设定速度从所述停车位置移动至所述至少一个终点位置;
14、在所述测试车辆的移动过程中,按照设定频率采集所述测试车辆的经纬度坐标;
15、在所述测试车辆到达所述至少一个终点位置之后,根据采集的所述经纬度坐标,生成所述停车位置与所述至少一个终点位置之间的路线轨迹点。
16、可选地,在所述将所述移车指令发送给所述远程信息处理器之后,还包括以下步骤:
17、响应于接收到所述远程信息处理器发送的移车完成指令,记录所述目标车辆的移车状态信息;
18、将所述移车状态信息发送给远程控制程序。
19、第二方面,本技术实施例提供了一种辆控制方法,应用于目标车辆对应的远程信息处理器,所述方法包括以下步骤:
20、获取并保存服务器发送的所述目标车辆当前所处的初始停车位置与至少一个终点位置之间的路线轨迹点;
21、响应于接收到所述服务器发送的移车指令和目标终点位置,获取所述路线轨迹点中与所述目标终点位置匹配的目标线路轨迹点;
22、将所述目标线路轨迹点发送给所述目标车辆的车辆运动控制模块,以通过所述车辆运动控制模块按照所述目标线路轨迹点控制所述目标车辆从所述初始停车位置移动至所述目标终点位置。
23、可选地,所述将所述目标线路轨迹点发送给所述目标车辆的车辆运动控制模块,包括以下步骤:
24、获取所述目标车辆的锁车状态信息;
25、响应于所述锁车状态信息指示所述目标车辆为锁车状态,生成解锁指令,并将所述解锁指令发送给所述目标车辆的解锁控制模块;
26、响应于所述目标车辆为解锁状态,将所述目标线路轨迹点发送给所述目标车辆的车辆运动控制模块。
27、可选地,在所述将所述目标线路轨迹点发送给所述目标车辆的车辆运动控制模块之后,还包括以下步骤:
28、在所述目标车辆移动至所述目标终点位置之后,获取所述目标车辆的移车状态信息;
29、将所述移车状态信息发送给所述服务器,以由所述服务器将所述移车状态信息发送给远程控制程序。
30、第三方面,本技术实施例提供了一种车辆控制系统,所述系统包括:远程控制程序、服务器、目标车辆对应的远程信息处理器和车辆运动控制模块,
31、所述远程控制程序,向所述服务器发送针对所述目标车辆的路线轨迹点下发指令,及针对所述目标车辆移动至目标终点位置的指令;
32、所述服务器,响应于所述路线轨迹点下发指令,获取所述目标车辆当前所处的初始停车位置,及所述目标车辆所处目标场景内的至少一个终点位置;获取预先保存的所述初始停车位置与至少一个所述终点位置之间的路线轨迹点;将所述路线轨迹点发送至所述远程信息处理器;响应于所述目标车辆移动至目标终点位置的指令,生成所述目标车辆对应的移车指令;将所述移车指令发送给所述远程信息处理器;
33、所述远程信息处理器,响应于所述移车指令,获取所述路线轨迹点中与所述目标终点位置匹配的目标线路轨迹点,将所述目标线路轨迹点发送给所述车辆运动控制模块;
34、所述车辆运动控制模块,按照所述目标线路轨迹点控制所述目标车辆从所述初始停车位置移动至所述目标终点位置。
35、第四方面,本技术实施例提供了一种电子设备,包括::
36、存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现上述任一项所述的车辆控制方法。
37、第五方面,本技术实施例提供了一种可读存储介质,当所述存储介质中的指令由电子设备的处理器执行时,使得电子设备能够执行上述任一项所述的车辆控制方法。
38、在本技术实施例中,通过响应于接收到远程控制程序发送的针对目标车辆的路线轨迹点下发指令,获取目标车辆当前所处的初始停车位置,及目标车辆所处目标场景内的至少一个终点位置,获取预先获取的初始停车位置与至少一个终点位置之间的路线轨迹点。将路线轨迹点发送至目标车辆对应的远程信息处理器。响应于接收的远程控制程序发送的针对目标车辆移动至目标终点位置的指令,生成目标车辆对应的移车指令。将移车指令发送给远程信息处理器,以由远程信息处理器响应于移车指令,获取路线轨迹点中与目标终点位置匹配的目标线路轨迹点,将目标线路轨迹点发送给目标车辆的车辆运动控制模块,以通过车辆运动控制模块按照目标线路轨迹点控制目标车辆从初始停车位置移动至目标终点位置。本技术实施例针对固定路线的移车场景内,通过预先获取初始停车位置与至少一个终点位置之间的路线轨迹点,实现车辆的自动移车,整个过程中无需人工参与,极大的降低了人工成本和时间成本。
39、上述说明仅是本技术技术方案的概述,为了能够更清楚了解本技术的技术手段,而可依照说明书的内容予以实施,并且为了让本技术的上述和其它目的、特征和优点能够更明显易懂,以下特举本技术的具体实施方式。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198536.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表