基于巡视器和无人机的协同探测方法及系统
- 国知局
- 2024-07-31 23:56:23
本发明涉及地外天体探测,更具体的说是涉及一种基于巡视器和无人机的协同探测方法及系统。
背景技术:
1、针对地外天体的探测任务,大多数基于单个巡视器进行开展,由于巡视器不具有快速移动、且不能及时有效识别前方障碍危险,导致其探测范围较小,探测效率低,同时自身定位系统也较易受到行星地表环境因素的影响。
2、目前,无人机因探测范围广,且具有初步排查危险区域、大范围寻找兴趣目标等能力,在国外已经开始了巡视器和无人机协同探测的萌芽,2020年美国发射了“毅力号”火星车并同时携带“机智号”无人机,开启了巡视器与无人机共同探测的先河。
3、但是“机智号”无人机在此次的探测任务中更多起到了一种实验性的技术验证作用,而并没有形成协同探测。
4、因此,亟需提出一种真正意义上的协同探测方法,来提升巡视器的定位精度与探测范围。
技术实现思路
1、有鉴于此,本发明提供了一种基于巡视器和无人机的协同探测方法及系统,用于扩大巡视器在地外行星的探测范围,提高巡视器在行进过程中的安全性以及定位精度。
2、为了实现上述目的,本发明采用如下技术方案:
3、一方面,本发明公开了一种基于巡视器和无人机的协同探测方法,包括,
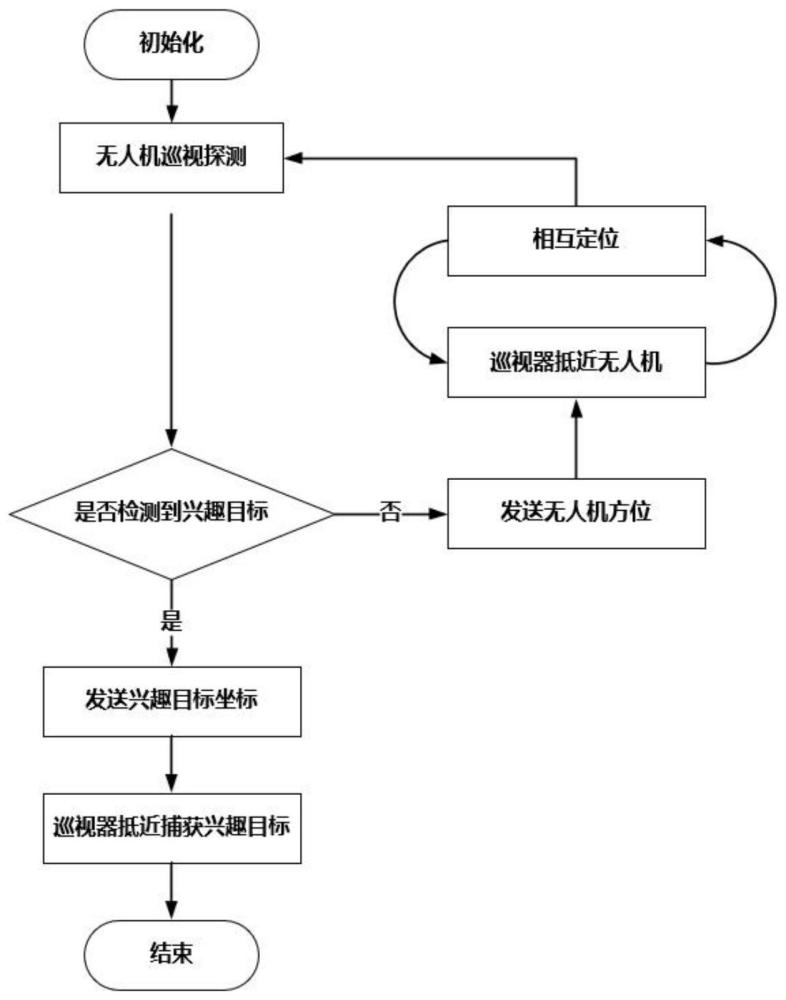
4、无人机按确定的飞行方向进行探测,当检测到兴趣目标时,控制巡视器抵近兴趣目标,未检测到兴趣目标,控制巡视器抵近无人机;其中,
5、巡视器抵近无人机时,根据巡视器在世界坐标系中的坐标以及同一位置无人机视角下巡视器在世界坐标系中的坐标,对巡视器的位姿变化进行优化。
6、作为优选,所述无人机包括前视和下视摄像头,确定飞行方向时,
7、无人机垂直起飞,四面环拍,得到各方向图像;
8、以及对各方向图像进行特征点检测,根据特征点的数量确定飞行方向。
9、作为优选,无人机按步长n进行探测,步长n满足巡视器始终在无人机的下视摄像头范围内,且巡视器每行进n米进行一次优化,n<n。
10、作为优选,无人机在飞行探测时,根据前视和下视摄像头采集的信息构建先验地图,并对环境中的障碍物,和/或潜在兴趣目标进行标识,以及
11、根据所述先验地图和兴趣目标的坐标,控制巡视器抵近兴趣目标;
12、根据所述先验地图和无人机的世界坐标,控制巡视器抵近无人机。
13、作为优选,同一位置无人机视角下巡视器在世界坐标系下的坐标的获取过程包括:
14、在巡视器上预设标识点,使无人机分别采用姿态m和姿态m+1对巡视器进行拍照,得到标识点的像素坐标am和am+1,
15、根据像素坐标am和am+1按如下公式确定标识点相对于处于姿态m/m+1的无人机的深度信息,
16、
17、r与t分别为无人机从姿态m到姿态m+1的位姿变换矩阵中的旋转矩阵与平移向量;
18、根据无人机处于姿态m/m+1时的深度信息,得到无人机视角下巡视器在世界坐标系中坐标。
19、作为优选,考虑世界坐标系下x方向坐标,y方向坐标与xy平面偏航角,利用卡尔曼滤波对巡视器的位姿变化进行优化,其中,
20、系统运动模型方程为:
21、
22、其中为巡视器在t-1时刻的状态值,为巡视器在t时刻的状态估计值,{r}代表这是巡视器通过自身运动对世界坐标的估计,dt为巡视器在两个状态之间移动的时间间隔,vt-1,wt-1为在这段时间间隔内巡视器的线速度与角速度,noiset-1为随机噪声的估计值,满足均值为0的高斯分布;
23、系统的测量方程为:
24、
25、其中为巡视器在t时刻通过无人机观测得到的数值,{w}代表是通过无人机测量得到的巡视器世界坐标系下的坐标,biast-1为观测噪声,同样满足均值为0的高斯分布;
26、迭代模型为:
27、
28、
29、
30、
31、
32、其中为t时刻要估计的巡视器在世界坐标系下在x方向,y方向的坐标与xy平面的偏航角,为在t-1时刻三个变量最优输出值的均值。
33、另一方面,本申请还公开了一种基于巡视器和无人机的协同探测系统,包括,
34、无人机具有前视和下视摄像头,用于按确定的飞行方向进行探测,判断是否检测到兴趣目标,并将判断结果回传至巡视器,
35、巡视器匹配终端处理器,用于根据回传结果,控制巡视器行进,以及根据巡视器在世界坐标系下的的坐标和同一位置无人机视角下巡视器在世界坐标系下的坐标;对巡视器的位姿变化进行优化。
36、作为优选,巡视器正前方安装有深度相机,用于捕获彩色图像与深度图像。
37、作为优选,巡视器采用socket通信方式与无人机进行数据传输,且终端处理器通过串口连接arduino开发板,用以控制电机驱动。
38、经由上述的技术方案可知,本发明公开提供了一种基于巡视器和无人机的协同探测方法及系统,与现有技术相比,具有以下优点:
39、(1)利用火星无人机探测距离远的优点,可以有效增加探测范围,并提升对兴趣目标的搜寻效率;
40、(2)无人机在探测过程中可以初步标识危险区域与障碍物,可标识在地图上传递给巡视器,以提升后续巡视器探测的安全性;
41、(3)在探测过程中提出了相互定位的算法,有效的提升了巡视探测过程中巡视器的定位精度。
技术特征:1.一种基于巡视器和无人机的协同探测方法,其特征在于,
2.根据权利要求1所述的一种基于巡视器和无人机的协同探测方法,其特征在于,所述无人机包括前视和下视摄像头,确定飞行方向时,
3.根据权利要求2所述的一种基于巡视器和无人机的协同探测方法,其特征在于,无人机按步长n进行探测,步长n满足巡视器始终在无人机的下视摄像头范围内,且巡视器每行进n米进行一次优化,n<n。
4.根据权利要求2所述的一种基于巡视器和无人机的协同探测方法,其特征在于,无人机在飞行探测时,根据前视和下视摄像头采集的信息构建先验地图,并对环境中的障碍物,和/或潜在兴趣目标进行标识,以及
5.根据权利要求1所述的一种基于巡视器和无人机的协同探测方法,其特征在于,同一位置无人机视角下巡视器在世界坐标系下的坐标的获取过程包括:
6.根据权利要求1所述的一种基于巡视器和无人机的协同探测方法,其特征在于,考虑世界坐标系下x方向坐标,y方向坐标与xy平面偏航角,利用卡尔曼滤波对巡视器的位姿变化进行优化,其中,
7.一种基于巡视器和无人机的协同探测系统,其特征在于,
8.根据权利要求7所述的一种基于巡视器和无人机的协同探测系统,其特征在于,巡视器正前方安装有深度相机,用于捕获彩色图像与深度图像。
9.根据权利要求7所述的一种基于巡视器和无人机的协同探测系统,其特征在于,巡视器采用socket通信方式与无人机进行数据传输,且终端处理器通过串口连接arduino开发板,用以控制电机驱动。
技术总结本发明系一种基于巡视器和无人机的协同探测方法及系统,先使无人机按确定的飞行方向进行探测,当检测到兴趣目标时,控制巡视器抵近兴趣目标,未检测到兴趣目标,控制巡视器抵近无人机;同时,巡视器抵近过程中,根据巡视器在世界坐标系中的坐标与同一位置无人机视角下巡视器在世界坐标系中的坐标,对巡视器的位姿变化进行优化。本发明可有效扩大探测范围,提高探测效率,同时可提高巡视器的探测安全性以及探测中的定位精度。技术研发人员:孟偲,李俊博,梅既澜,李依真,曾粤,安文宇,程宇奇,骆彦宁,管晨淇受保护的技术使用者:北京航空航天大学技术研发日:技术公布日:2024/6/30本文地址:https://www.jishuxx.com/zhuanli/20240730/199289.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表