基于动态障碍物感知的智能绕障控制方法、装置与无人机与流程
- 国知局
- 2024-08-01 00:02:33
本技术涉及智能绕障控制,具体而言,涉及一种基于动态障碍物感知的智能绕障控制方法、装置、无人机与存储介质。
背景技术:
1、智能绕障通常是指通过感知、识别和规划技术,使机器人、自动驾驶无人机或其他智能设备能够在复杂环境中安全、高效地避开障碍物,这种技术依赖于传感器,如摄像头、激光雷达和超声波传感器,以收集周围环境的信息,并利用算法对这些信息进行分析和处理,从而使设备能够做出避开障碍物的决策并进行相应的行动,智能绕障技术在自动化、无人机和智能机器人等领域具有重要的应用价值。
2、现有的智能绕障控制方法的准确性和实时性较差,对于障碍物的感知准确性较低,不利于提高智能无人机的安全性和行驶效率。
技术实现思路
1、本技术的主要目的在于提供一种基于动态障碍物感知的智能绕障控制方法、装置、无人机与存储介质,以至少解决现有的智能绕障控制方法的准确性和实时性较差,对于障碍物的感知准确性较低,不利于提高智能无人机的安全性和行驶效率的问题。
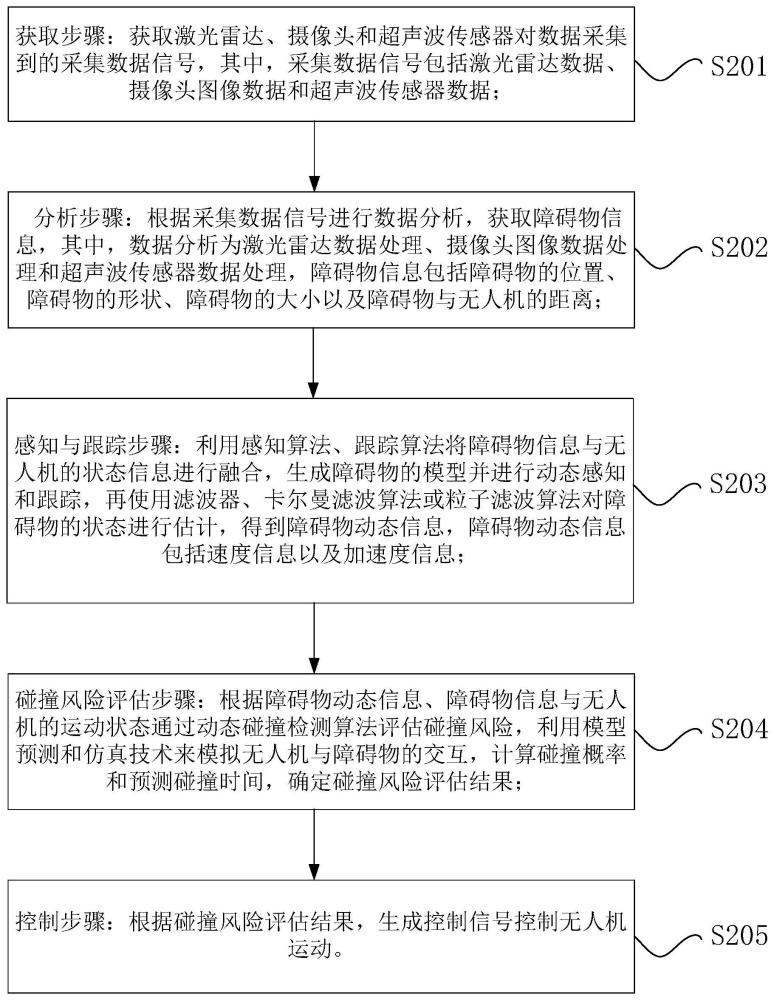
2、为了实现上述目的,根据本技术的一个方面,提供了一种基于动态障碍物感知的智能绕障控制方法,所述方法应用于无人机的控制器,所述无人机配有激光雷达、摄像头、超声波传感器,所述方法包括:获取步骤:获取所述激光雷达、所述摄像头和所述超声波传感器对数据采集到的采集数据信号,其中,所述采集数据信号包括激光雷达数据、摄像头图像数据和超声波传感器数据;分析步骤:根据所述采集数据信号进行数据分析,获取障碍物信息,其中,所述数据分析为所述激光雷达数据处理、所述摄像头图像数据处理和所述超声波传感器数据处理,所述障碍物信息包括所述障碍物的位置、所述障碍物的形状、所述障碍物的大小以及所述障碍物与所述无人机的距离;感知与跟踪步骤:利用感知算法、跟踪算法将所述障碍物信息与所述无人机的状态信息进行融合,生成所述障碍物的模型并进行动态感知和跟踪,再使用滤波器、卡尔曼滤波算法或粒子滤波算法对障碍物的状态进行估计,得到障碍物动态信息,所述障碍物动态信息包括速度信息以及加速度信息;碰撞风险评估步骤:根据所述障碍物动态信息、所述障碍物信息与所述无人机的运动状态通过动态碰撞检测算法评估碰撞风险,利用模型预测和仿真技术来模拟无人机与障碍物的交互,计算碰撞概率和预测碰撞时间,确定碰撞风险评估结果;控制步骤:根据所述碰撞风险评估结果,生成控制信号控制所述无人机运动。
3、可选地,碰撞风险评估步骤:根据所述障碍物动态信息、所述障碍物信息与所述无人机的运动状态通过动态碰撞检测算法评估碰撞风险,利用模型预测和仿真技术来模拟无人机与障碍物的交互,计算碰撞概率和预测碰撞时间,确定碰撞风险评估结果,包括:根据所述障碍物动态信息和所述障碍物信息建立障碍物动态模型,根据所述无人机的运动状态和控制信号建立无人机运动模型;利用所述障碍物动态模型和所述无人机运动模型来模拟所述无人机与所述障碍物的交互过程,确定是否存在碰撞的可能性,根据所述无人机的运动轨迹和所述障碍物的预测轨迹,进行碰撞检测和预测,计算所述碰撞概率;在模拟过程中,记录发生所述无人机与所述障碍物碰撞的时间点,根据模拟时间步长和碰撞发生的时间点,预测所述碰撞时间;根据所述碰撞概率和所述碰撞时间确定所述碰撞风险评估结果。
4、可选地,控制步骤:根据所述碰撞风险评估结果,生成控制策略控制所述无人机运动,包括:根据所述碰撞风险评估结果,生成所述控制策略对所述无人机进行控制,其中,所述控制策略包括速度调整策略、转向策略、制动动作策略、路径规划策略;在碰撞风险较高的情况下,通过生成所述速度调整策略来降低所述无人机的速度减小所述碰撞概率,速度调整策略根据所述碰撞概率的变化进行实时调整;在高碰撞概率区域或高碰撞概率时间段内,控制所述无人机缓慢移动,通过生成所述转向策略来改变所述无人机的航向角度或航行轨迹,使所述无人机绕过所述高碰撞概率区域;在碰撞风险高的情况下,执行所述制动动作策略,控制所述无人机制动动作,其中,所述制动动作策略的调整根据实时的碰撞概率进行优化;根据所述碰撞风险评估结果,执行所述路径规划策略,实时所述调整无人机的路径规划,通过选择安全的路径,避开潜在碰撞点,其中,所述路径规划策略的调整结合地图信息、所述障碍物信息和实时的所述障碍物动态信息,以使得所述无人机在复杂环境中灵活应对。
5、可选地,在控制步骤:根据所述碰撞风险评估结果,生成控制策略控制所述无人机运动之后,所述方法还包括:采用机器学习模型或深度学习模型根据所述无人机运动过程中采集的运行数据,优化所述无人机的所述速度调整策略、所述转向策略、所述制动动作策略以及所述路径规划策略。
6、可选地,所述机器学习模型或深度学习模型,包括决策树模型、支持向量机模型、卷积神经网络模型、循环神经网络模型中的至少之一。
7、可选地,所述激光雷达数据处理为对所述激光雷达采集到的点云数据进行滤波、聚类和分割,用于有效识别和描述所述障碍物;所述摄像头图像处理为使用图像处理算法对所述摄像头采集到的图像进行特征提取、目标检测和跟踪,以获取所述障碍物信息;所述超声波传感器数据处理为根据所述超声波传感器的测量值计算所述障碍物与所述无人机的距离。
8、可选地,获取步骤:获取所述激光雷达、所述摄像头和所述超声波传感器对数据采集到的采集数据信号,其中,所述采集数据信号包括激光雷达数据、摄像头图像数据和超声波传感器数据,包括:获取所述激光雷达数据为所述激光雷达以高频率进行激光束扫描得到的周围环境的三维点云数据;获取所述摄像头图像数据为所述摄像头连续捕获到的图像数据,并利用计算机视觉算法进行目标检测和分类得到的数据,获取所述超声波传感器数据为周期性发送超声波脉冲,并测量脉冲的回程时间来计算障碍物的距离的数据。
9、根据本技术的另一方面,提供了一种基于动态障碍物感知的智能绕障控制装置,所述装置应用于无人机的控制器,所述无人机配有激光雷达、摄像头、超声波传感器,所述装置包括:获取单元,用于执行获取步骤:获取所述激光雷达、所述摄像头和所述超声波传感器对数据采集到的采集数据信号,其中,所述采集数据信号包括激光雷达数据、摄像头图像数据和超声波传感器数据;分析单元,用于执行分析步骤:根据所述采集数据信号进行数据分析,获取障碍物信息,其中,所述数据分析为所述激光雷达数据处理、所述摄像头图像数据处理和所述超声波传感器数据处理,所述障碍物信息包括所述障碍物的位置、所述障碍物的形状、所述障碍物的大小以及所述障碍物与所述无人机的距离;感知与跟踪单元,用于执行感知与跟踪步骤:利用感知算法、跟踪算法将所述障碍物信息与所述无人机的状态信息进行融合,生成所述障碍物的模型并进行动态感知和跟踪,再使用滤波器、卡尔曼滤波算法或粒子滤波算法对障碍物的状态进行估计,得到障碍物动态信息,所述障碍物动态信息包括速度信息以及加速度信息;碰撞风险评估单元,用于执行碰撞风险评估步骤:根据所述障碍物动态信息、所述障碍物信息与所述无人机的运动状态通过动态碰撞检测算法评估碰撞风险,利用模型预测和仿真技术来模拟无人机与障碍物的交互,计算碰撞概率和预测碰撞时间,确定碰撞风险评估结果;控制单元,用于执行控制步骤:根据所述碰撞风险评估结果,生成控制信号控制所述无人机运动。
10、根据本技术的再一方面,提供了一种无人机,无人机配有激光雷达、摄像头、超声波传感器,所述无人机还包括控制器,所述控制器执行权利要求1至7中任意一种所述的基于动态障碍物感知的智能绕障控制方法。
11、根据本技术的又一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行权利要求1至7中任意一种所述的基于动态障碍物感知的智能绕障控制方法。
12、应用本技术的技术方案,通过获取步骤:获取激光雷达、摄像头和超声波传感器对数据采集到的采集数据信号,其中,采集数据信号包括激光雷达数据、摄像头图像数据和超声波传感器数据;分析步骤:根据采集数据信号进行数据分析,获取障碍物信息,其中,数据分析为激光雷达数据处理、摄像头图像数据处理和超声波传感器数据处理,障碍物信息包括障碍物的位置、障碍物的形状、障碍物的大小以及障碍物与无人机的距离;感知与跟踪步骤:利用感知算法、跟踪算法将障碍物信息与无人机的状态信息进行融合,生成障碍物的模型并进行动态感知和跟踪,再使用滤波器、卡尔曼滤波算法或粒子滤波算法对障碍物的状态进行估计,得到障碍物动态信息,障碍物动态信息包括速度信息以及加速度信息;碰撞风险评估步骤:根据障碍物动态信息、障碍物信息与无人机的运动状态通过动态碰撞检测算法评估碰撞风险,利用模型预测和仿真技术来模拟无人机与障碍物的交互,计算碰撞概率和预测碰撞时间,确定碰撞风险评估结果;控制步骤:根据碰撞风险评估结果,生成控制信号控制无人机运动。通过一种基于动态障碍物感知的智能绕障控制方法,能够通过多个传感器进行实时监测,能够有效地提高感知准确性,基于动态障碍物感知,能够更加及时地做出响应,通过对障碍物的位置、大小和形状进行分析,能够更精确地判断与障碍物的距离和角度,生成相应的控制信号,能够实现对智能无人机的精确控制,通过执行器对智能无人机进行控制,能够将智能无人机的运动状态实时反馈,解决了现有的智能绕障控制方法的准确性和实时性较差,对于障碍物的感知准确性较低,不利于提高智能无人机的安全性和行驶效率的问题。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199511.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表