智能全自动耙机电控系统的制作方法
- 国知局
- 2024-08-01 00:11:08
本申请涉及沉降槽的耙机维护设备,尤其涉及一种智能全自动耙机电控系统。
背景技术:
1、本部分的陈述仅仅是提供了与本申请相关的背景技术信息,不必然构成在先技术。
2、沉降槽耙机是一种用于清理污水处理工厂中沉淀槽底部淤泥的设备,在使用的时候通过耙机的转动实现对沉降槽底部淤泥的清理;由于电机传动的响应速度比液压传动的速度要快,而且受环境温度的影响很小,因此很多地区都采用通过电机控制耙机转动的方式。
3、但是耙机在沉降槽底部清理淤泥的时候存在问题:如果沉降槽底部淤泥很厚或者有密度大、粘性大的区域,或者因时间久在沉降槽底部有淤泥的结块,当耙机转动到此区域的时候易被挡住转不动,使得电机电流增大,严重的损害电机。
4、更重要的是,如果耙机不能及时恢复转动,则沉降槽底部的淤泥就会不断的堆积,进一步增加耙机清理的难度。鉴于此,有必要提供一种智能全自动耙机电控系统,以解决上述技术问题。
技术实现思路
1、本申请要解决的技术问题是:克服现有技术的不足,提供一种智能全自动耙机电控系统。
2、本申请解决现有技术存在的问题所采用的技术方案是:
3、本申请提出了一种智能全自动耙机电控系统,包括:
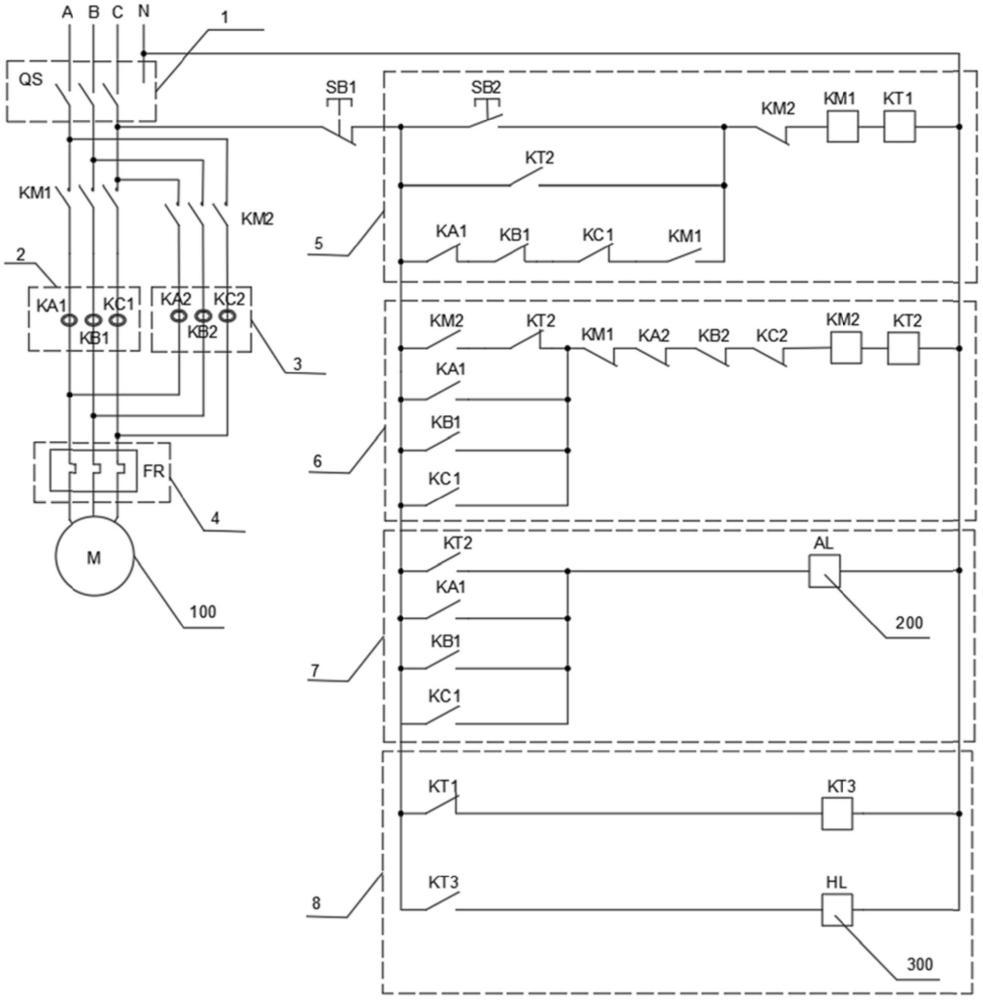
4、电源控制模块,用于控制耙机电机、正转控制计时模块、反转控制计时模块和预警模块的电源通断;
5、正转控制计时模块,用于控制耙机电机的正向转动并对耙机电机正向转动的时间进行计时;
6、反转控制计时模块,用于控制耙机电机的反向转动并对耙机电机反向转动的时间进行计时;
7、预警模块,用于在耙机电机反向转动时间达到第二时间阈值和/或耙机电机正转电流超过第一电流阈值时进行普通预警;用于在耙机电机没有正向转动时的时间达到第三时间阈值时进行紧急预警。
8、优选地,所述正转控制计时模块包括第一时间继电器kt1,所述第一时间继电器kt1线圈的一端与零线连接、另一端与正转接触器km1线圈的一端连接;所述正转接触器km1线圈的另一端与反转接触器km2的常闭触点的一端连接,反转接触器km2的常闭触点的另一端与启动按钮sb2的一端、第二时间继电器kt2常开触点的一端连接;所述启动按钮sb2的另一端、第二时间继电器kt2常开触点的另一端与停止按钮sb1的一端连接,停止按钮sb1的另一端与一根火线连接;
9、所述第二时间继电器kt2的常开触点两端并联连接有串联连接的正转接触器km1的常开触点、电流开关kc1的常闭触点、电流开关kb1的常闭触点和电流开关ka1的常闭触点;
10、所述电流开关kc1、电流开关kb1、电流开关ka1分别套设于用于控制耙机电机正转的三根相线上;
11、所述正转接触器km1的常开触点串设于耙机电机的正转电源线路上。
12、优选地,所述反转控制计时模块包括第二时间继电器kt2,所述第二时间继电器kt2线圈的一端与零线连接,另一端与反转接触器km2线圈的一端连接;所述反转接触器km2线圈的另一端与正转接触器km1的常闭触点的一端连接,正转接触器km1的常闭触点的另一端与第二时间继电器kt2的常闭触点的一端、电流开关ka1的常开触点的一端、电流开关kb1的常开触点的一端、电流开关kc1常开触点的一端连接;所述电流开关ka1的常开触点的另一端、电流开关kb1的常开触点的另一端、电流开关kc1常开触点的另一端与反转接触器km2的常开触点的一端、停止按钮sb1的一端连接;所述反转接触器km2的常开触点的另一端与第二时间继电器kt2的常闭触点的另一端连接;
13、所述反转接触器km2的常开触点串设于耙机电机的反转电源线路上。
14、优选地,所述反转接触器km2线圈的另一端与第二时间继电器kt2的常闭触点的一端之间串联连接有依次串联连接的电流开关ka2的常闭触点、电流开关kb2的常闭触点和电流开关kc2的常闭触点;
15、所述电流开关ka2、电流开关kb2、电流开关kc2分别套设于用于控制耙机电机反转的三根相线上。
16、优选地,所述预警模块包括普通预警模块、紧急预警模块;
17、所述普通预警模块包括第一报警器al,所述第一报警器al一端与零线连接,第一报警器al的另一端与第二时间继电器kt2的常开触点的一端、电流开关ka1的常开触点的一端、电流开关kb1常开触点的一端、电流开关kc1常开触点的一端连接;所述第二时间继电器kt2的常开触点的另一端、电流开关ka1的常开触点的另一端、电流开关kb1常开触点的另一端、电流开关kc1常开触点的另一端与停止按钮sb1的一端连接。
18、优选地,所述紧急预警模块包括第三时间继电器kt3和第二报警器hl,所述第三时间继电器kt3线圈的一端、第二报警器hl的一端与零线连接;所述第三时间继电器kt3线圈的另一端与第一时间继电器kt1的常闭触点的一端连接;所述第二报警器hl的另一端与第三时间继电器kt3的常开触点的一端连接;所述第一时间继电器kt1的常闭触点的另一端、第三时间继电器kt3的常开触点的另一端均与停止按钮sb1的一端连接。
19、优选地,所述第一时间继电器kt1、第二时间继电器kt2、第三时间继电器kt3均为通电延时型时间继电器。
20、优选地,所述第二时间继电器kt2设定值为第二时间阈值,所述第三时间继电器kt3设定值为第三时间阈值;所述第三时间阈值大于第二时间阈值。
21、优选地,所述电源控制模块为断路器。
22、优选地,所述耙机电机的电源线路上设有热保模块,所述热保模块为热继电器。
23、与现有技术相比,本申请的有益效果为:
24、本申请的智能全自动耙机电控系统,在耙机转动时,如果碰到“阻碍”使得耙机运行困难,则可以自动的控制耙机电机反转一段时间后再回复正转,一方面避免了耙机电机的超负荷运行,另一方面在沉降槽使用的过程中,如果沉降槽底部淤泥很厚或者有密度大、粘性大的区域,或者因时间久在沉降槽底部有淤泥的结块,当耙机转动到此区域的时候被挡住转不动,可以自动控制耙机电机反转后再正转,以起到对该区域的清理效果,避免沉降槽底部的淤泥堆积、增加耙机清理的难度。
技术特征:1.智能全自动耙机电控系统,其特征在于,包括:
2.根据权利要求1所述的智能全自动耙机电控系统,其特征在于:
3.根据权利要求2所述的智能全自动耙机电控系统,其特征在于:
4.根据权利要求3所述的智能全自动耙机电控系统,其特征在于:
5.根据权利要求3或4所述的智能全自动耙机电控系统,其特征在于:
6.根据权利要求5所述的智能全自动耙机电控系统,其特征在于:
7.根据权利要求6所述的智能全自动耙机电控系统,其特征在于:
8.根据权利要求7所述的智能全自动耙机电控系统,其特征在于:
9.根据权利要求1所述的智能全自动耙机电控系统,其特征在于:
10.根据权利要求1所述的智能全自动耙机电控系统,其特征在于:
技术总结本申请涉及沉降槽的耙机维护设备技术领域,尤其涉及一种智能全自动耙机电控系统。包括电源控制模块、正转控制计时模块、反转控制计时模块和预警模块,在耙机转动时,如果碰到“阻碍”使得耙机运行困难,可以自动的控制耙机电机反转一段时间后再回复正转,一方面避免了耙机电机的超负荷运行,另一方面在沉降槽使用的过程中,起到对沉降槽底部有“阻碍”区域的清理效果,避免沉降槽底部的淤泥堆积。技术研发人员:马贵永,李玉坤,杜德朋受保护的技术使用者:山东瑞尚机械有限公司技术研发日:20231215技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240730/199909.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表