无人机控制方法、终端、无人机及存储介质与流程
- 国知局
- 2024-08-01 00:12:51
本发明属于无人机控制,尤其涉及一种无人机控制方法、终端、无人机及存储介质。
背景技术:
1、无人机具有体积较小、结构简单、控制比较灵活等特点,能够垂直起降、自由悬停,还能够适应各种自然环境,具备自主飞行和自主降落等优点,可以在一些不适合人类进入的复杂和危险环境中进行作业,因此在许多领域得到广泛应用。
2、现有技术中,无人机上通常设置有激光雷达,通过激光雷达扫描得到的三维点云数据进行测距,但激光雷达的精度越高,采集的数据量越大,测距过程中所需处理的数据也将越多,影响测距的实时性,在地形复杂的状态下难以对无人机进行准确控制。
技术实现思路
1、有鉴于此,本发明提供了一种无人机控制方法、终端、无人机及存储介质,旨在解决现有技术中测距过程中计算量过大导致的无法对无人机准确控制的问题。
2、本发明实施例的第一方面提供了一种无人机控制方法,包括:
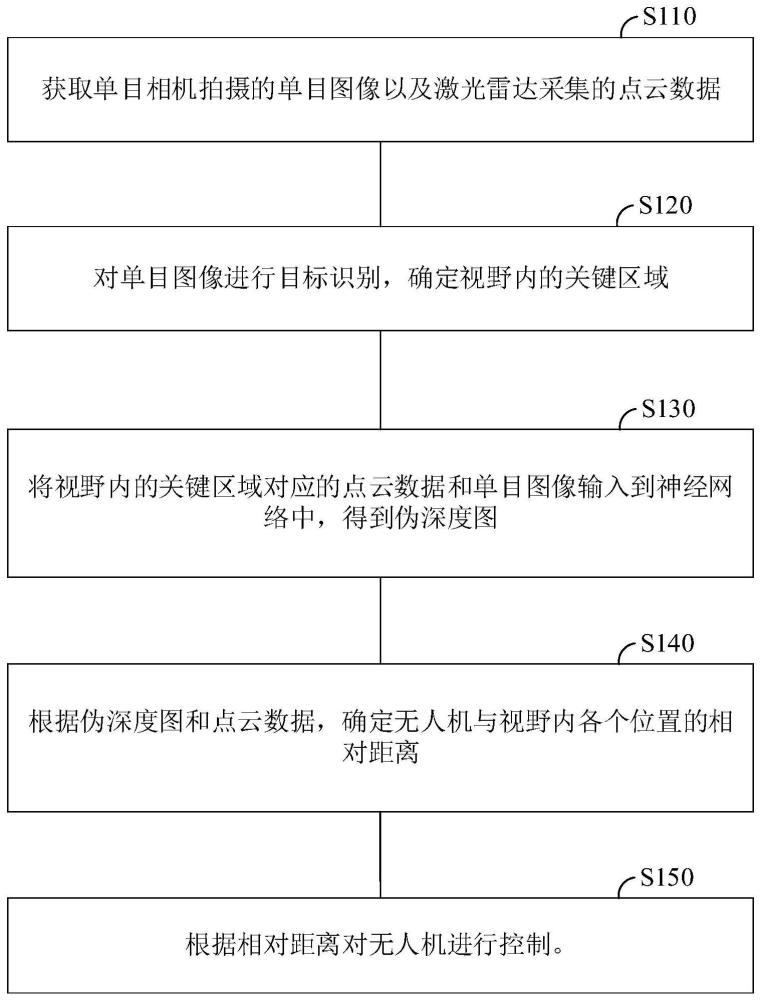
3、获取单目相机拍摄的单目图像以及激光雷达采集的点云数据;
4、对单目图像进行目标识别,确定视野内的关键区域;
5、将视野内的关键区域对应的点云数据和单目图像输入到神经网络中,得到伪深度图;
6、根据伪深度图和点云数据,确定无人机与视野内各个位置的相对距离;
7、根据相对距离对无人机进行控制。
8、本发明实施例的第二方面提供了一种无人机控制装置,包括:
9、获取模块,用于获取单目相机拍摄的单目图像以及激光雷达采集的点云数据;
10、识别模块,用于对单目图像进行目标识别,确定视野内的关键区域;
11、预测模块,用于将视野内的关键区域对应的点云数据和单目图像输入到神经网络中,得到伪深度图;
12、确定模块,用于根据伪深度图和点云数据,确定无人机与视野内各个位置的相对距离;
13、控制模块,用于根据相对距离对无人机进行控制。
14、本发明实施例的第三方面提供了一种终端,包括存储器、处理器以及存储在存储器中并可在处理器上运行的计算机程序,处理器执行计算机程序时实现如上第一方面的无人机控制方法的步骤。
15、本发明实施例的第四方面提供了一种无人机,包括如上第三方面的终端。
16、本发明实施例的第五方面提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,计算机程序被处理器执行时实现如上第一方面的无人机控制方法的步骤。
17、本发明实施例提供的无人机控制方法、终端、无人机及存储介质,首先获取单目相机拍摄的单目图像以及激光雷达采集的点云数据;随后对单目图像进行目标识别,确定视野内的关键区域;接着将视野内的关键区域对应的点云数据和单目图像输入到神经网络中,得到伪深度图;再根据伪深度图和点云数据,确定无人机与视野内各个位置的相对距离;最终根据相对距离对无人机进行控制。通过提取出部分较为关键的点云数据,辅助单目图像进行深度估计,然后再依据点云数据对伪深度图进行进一步的修正,从而在较小的计算量下,计算出准确的相对距离,保证无人机控制的准确性。
技术特征:1.一种无人机控制方法,其特征在于,包括:
2.根据权利要求1所述的无人机控制方法,其特征在于,对所述单目图像进行目标识别,确定视野内的关键区域,包括:
3.根据权利要求2所述的无人机控制方法,其特征在于,对所述单目图像进行目标识别,得到多个第一目标并确定各个第一目标的当前状态信息,包括:
4.根据权利要求3所述的无人机控制方法,其特征在于,根据所述当前状态信息,确定各个第一目标对应的关键区域,包括:
5.根据权利要求2所述的无人机控制方法,其特征在于,将视野内的关键区域对应的点云数据和所述单目图像输入到神经网络中,得到伪深度图,包括:
6.根据权利要求3所述的无人机控制方法,其特征在于,根据所述伪深度图和所述点云数据,确定无人机与视野内各个位置的相对距离,包括:
7.根据权利要求3所述的无人机控制方法,其特征在于,各个第一位置包括第一类位置和第二类位置;根据所述第一距离和所述第二距离,计算误差矩阵,包括:
8.一种终端,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如上的权利要求1至7中任一项所述无人机控制方法的步骤。
9.一种无人机,其特征在于,包括如上权利要求8所述的终端。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上的权利要求1至7中任一项所述无人机控制方法的步骤。
技术总结本发明提供了一种无人机控制方法、终端、无人机及存储介质,首先获取单目相机拍摄的单目图像以及激光雷达采集的点云数据;随后对单目图像进行目标识别,确定视野内的关键区域;接着将视野内的关键区域对应的点云数据和单目图像输入到神经网络中,得到伪深度图;再根据伪深度图和点云数据,确定无人机与视野内各个位置的相对距离;最终根据相对距离对无人机进行控制。通过提取出部分较为关键的点云数据,辅助单目图像进行深度估计,然后再依据点云数据对伪深度图进行进一步的修正,从而在较小的计算量下,计算出准确的相对距离,保证无人机控制的准确性。技术研发人员:许旭光,李鹏,宋冠毅受保护的技术使用者:国家电投集团河北电力有限公司裕华分公司技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240730/200037.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表