用于沙漠植树机器人的障碍物避障方法、装置及系统
- 国知局
- 2024-08-01 00:15:49
本发明涉及自动驾驶和智能机器人领域,具体是用于沙漠植树机器人的障碍物避障方法、装置及系统。
背景技术:
1、在自动驾驶和智能机器人领域,障碍物识别和定位是至关重要的任务。目前的技术主要包括使用摄像头、激光雷达和雷达等传感器进行障碍物检测和定位。摄像头可以提供高分辨率的图像,适用于识别和定位静止或缓慢移动的障碍物。激光雷达可以提供准确的距离和位置信息,但在复杂环境和恶劣天气条件下可能受到限制。雷达可以在低能见度情况下工作,但其分辨率较低,不能提供详细的障碍物形状信息。
2、现有技术的缺陷和不足:
3、1.能见度适应性不足: 现有技术通常缺乏在不同能见度条件下自适应地切换传感器的能力。这导致在能见度较低时,障碍物识别和定位性能下降,增加了事故风险。
4、2.实时性不足: 一些现有技术在处理大量传感器数据时可能存在延迟,影响了实时性。这对于自动驾驶和机器人应用来说是不可接受的。
5、3.传感器选择不足: 现有技术往往只使用一种或两种传感器,无法充分利用不同传感器的优势。例如,在高能见度条件下使用摄像头和深度相机可以提供丰富的图像信息,但在低能见度条件下可能无法正常工作。而只使用激光雷达或雷达,则可能无法提供足够的障碍物形状和纹理信息。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供用于沙漠植树机器人的障碍物避障方法,包括如下步骤:
2、用于沙漠植树机器人的障碍物避障方法,其特征在于,包括如下步骤:
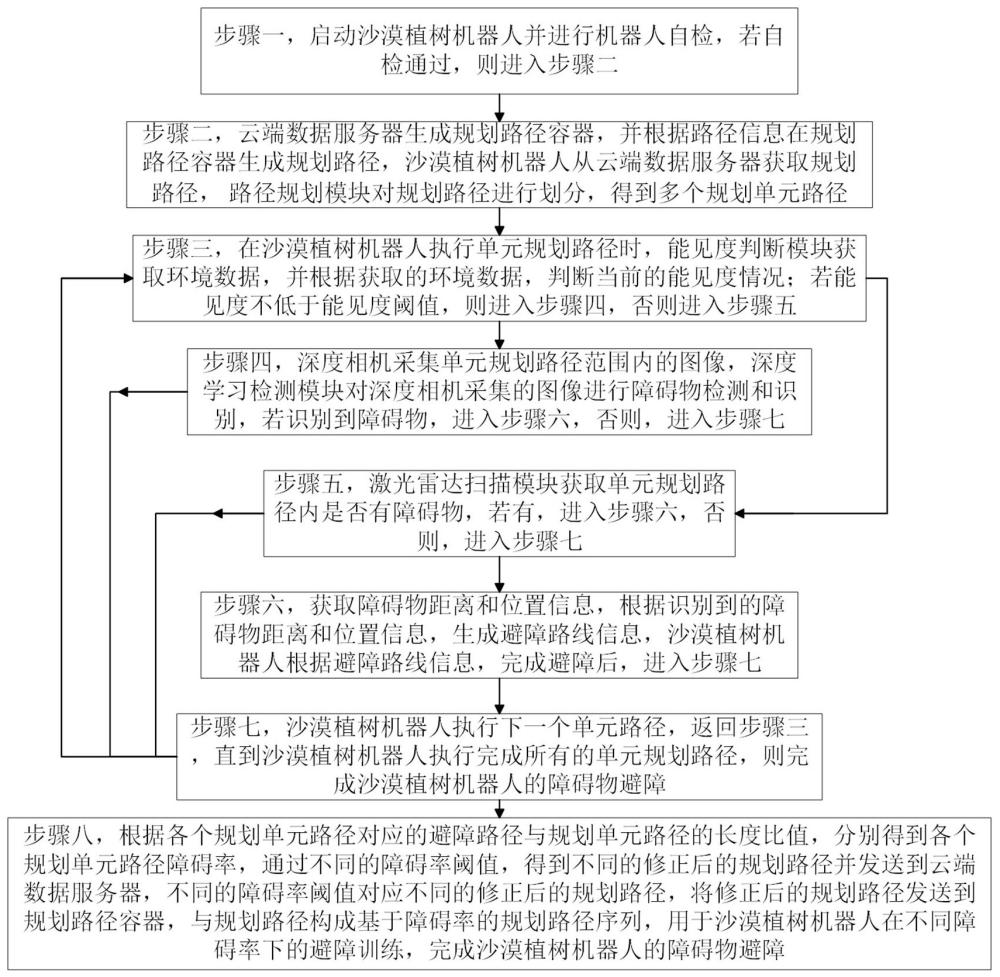
3、步骤一,启动沙漠植树机器人并进行机器人自检,若自检通过,则进入步骤二;
4、步骤二,云端数据服务器生成规划路径容器,并根据路径信息在规划路径容器生成规划路径,沙漠植树机器人从云端数据服务器获取规划路径, 路径规划模块对规划路径进行划分,得到多个规划单元路径;
5、步骤三,在沙漠植树机器人执行规划单元路径时,能见度判断模块获取环境数据,并根据获取的环境数据,判断当前的能见度情况;若能见度不低于能见度阈值,则进入步骤四,否则进入步骤五;
6、步骤四,深度相机采集规划单元路径范围内的图像,深度学习检测模块对深度相机采集的图像进行障碍物检测和识别,若识别到障碍物,进入步骤六,否则,进入步骤七;
7、步骤五,激光雷达扫描模块获取规划单元路径内是否有障碍物,若有,进入步骤六,否则,进入步骤七;
8、步骤六,获取障碍物距离和位置信息,根据识别到的障碍物距离和位置信息,生成避障路线信息,沙漠植树机器人根据避障路线信息,完成避障后,进入步骤七;
9、步骤七,沙漠植树机器人执行下一个单元路径,返回步骤三,直到沙漠植树机器人执行完成所有的规划单元路径,进入步骤八;
10、步骤八,根据各个规划单元路径对应的避障路径与规划单元路径的长度比值,分别得到各个规划单元路径障碍率,通过不同的障碍率阈值,得到不同的修正后的规划路径并发送到云端数据服务器,不同的障碍率阈值对应不同的修正后的规划路径,将修正后的规划路径发送到规划路径容器,与规划路径构成基于障碍率的规划路径序列,用于沙漠植树机器人在不同障碍率下的避障训练,完成沙漠植树机器人的障碍物避障。
11、进一步的,所述的启动沙漠植树机器人并进行机器人自检,包括:根据设定的自检项目,获取沙漠植树机器人的状态,若状态合格,则完成自检,并获取沙漠植树机器人的定位信息,否则,则对沙漠植树机器人进行故障排除。
12、进一步的,所述的沙漠植树机器人从云端数据服务器获取规划路径, 路径规划模块对规划路径进行划分,得到多个规划单元路径,包括:
13、沙漠植树机器人从云端数据服务器获取规划路径,若沙漠植树机器人的定位信息与规划路径的起点定位信息的偏差,不在偏差阈值范围内,则沙漠植树机器人根据规划路径的起点定位信息移动到偏差阈值范围;根据深度相机采集单元的测量距离和激光雷达扫描模块的测量距离,得到共同数据采集有效范围,根据共同数据采集有效范围对规划路径进行划分,得到多个规划单元路径。
14、进一步的,所述的在沙漠植树机器人执行规划单元路径时,能见度判断模块获取环境数据,并根据获取的环境数据,判断当前的能见度情况,包括:
15、能见度判断模块获取规划单元路径方向上的光线强度,根据光线强度的最大值和最小值得到能见度。
16、进一步的,所述的深度相机采集规划单元路径范围内的图像,深度学习检测模块对深度相机采集的图像进行障碍物检测和识别,包括:
17、收集并标注数据,对数据进行预处理与增强,按照7:2:1的比例划分数据集为训练集、验证集和测试集;使用训练集与yolov8模型进行训练,得到基于yolov8模型的障碍物识别模型,将深度学习相关库函数导入障碍物识别模型;使用深度相机采集单元获取图像;将图像输入至所述障碍物识别模型中,识别到障碍物及障碍物的像素坐标,将障碍物的像素坐标转换到世界坐标系下的三维坐标,得到障碍物的位置和形状。
18、进一步的,所述的激光雷达扫描模块获取规划单元路径内是否有障碍物,包括:激光雷达扫描模块扫描环境,获取障碍物的距离信息;对激光雷达获取的数据进行滤波和去噪处理,得到处理后的障碍物数据,根据处理后的障碍物数据,得到障碍物的位置信息和形状。
19、进一步的,所述的获取障碍物距离和位置信息,根据识别到的障碍物距离和位置信息,生成避障路线信息,包括:
20、根据障碍物的位置信息和形状,得到障碍物的几何中心点,根据沙漠植树机器人的定位信息与障碍物的几何中心点连线,得到与沙漠植树机器人行进方向的夹角,根据夹角得到避障方向,根据避障方向和障碍物在避障方向的障碍范围,生成避障路径信息。
21、进一步的,所述的修正后的规划路径为:若规划单元路径障碍率不大于设定障碍率阈值,则不修正规划单元路径;若规划单元路径障碍率大于设定障碍率阈值,则将规划单元路径替换为避障路径,生成修正后的规划路径;不同的障碍率阈值对应不同的修正后的规划路径,将修正后的规划路径发送到规划路径容器,与规划路径构成基于障碍率的规划路径序列,用于沙漠植树机器人在不同障碍率下的避障训练。
22、用于沙漠植树机器人的障碍物避障装置,包括沙漠植树机器人,应用所述的用于沙漠植树机器人的障碍物避障方法,包括: 能见度判断模块、深度相机采集单元、激光雷达扫描模块、路径规划模块、通信模块和数据处理模块;
23、所述的能见度判断模块、深度相机采集单元、激光雷达扫描模块、路径规划模块和通信模块分别与所述的数据处理模块连接;所述的沙漠植树机器人与所述的通信模块通信连接。
24、用于沙漠植树机器人的障碍物避障系统,包括用于沙漠植树机器人的障碍物避障装置,其特征在于,包括云端数据服务器、自检模块;
25、所述的云端数据服务器、自检模块分别与所述的用于沙漠植树机器人的障碍物避障装置通信连接。
26、本发明的有益效果是:能够根据不同的可见度条件自适应地选择使用深度相机或激光雷达进行障碍物识别和定位,提高了机器人在不同环境下的适应性和性能。
27、结合了yolov8深度学习模型、深度相机和激光雷达等技术,能够快速准确地识别和定位障碍物,提高了机器人避障的效率。
28、利用深度相机和激光雷达等传感器获取的数据,能够实现对障碍物的高精度识别和定位,提高了机器人行驶的安全性和稳定性。
29、通过深度学习模型和传感器数据的融合,实现了对环境的智能感知和决策,使机器人能够更加智能地避开障碍物,完成任务。适用于不同类型和规模的沙漠植树机器人,具有一定的通用性和可扩展性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200314.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表