一种感统训练用垫自动翻面缝合设备及方法与流程
- 国知局
- 2024-08-05 12:03:18
本发明涉及缝合设备,具体是一种感统训练用垫自动翻面缝合设备及方法。
背景技术:
1、感统训练用垫通常用于儿童感统训练,常见的有指压板感统训练垫、按摩球垫、平衡气垫等,这些垫子的设计旨在通过提供不同的触觉和平衡刺激,帮助儿童发展感官协调能力、平衡能力和身体感知能力,感统训练用垫表面的设计通常具有按摩效果,以提高触觉刺激,其表面带有小竹笋或其他凸起物,能给足底提供穴位按摩,表面设置多种图案,帮助提高感官协调和感知能力,感统训练用垫通常需要多种不同材料叠加缝制来达到多种效果,如上部采用凸起物面料或图案面料缝合在弹性垫上,下部采用防滑面料缝合在弹性垫上。
2、专利号cn202221736563.3,提出了一种抱枕加工用边角缝线设备,包括工作台,所述工作台的水平两侧均设置有一个缝纫机构,且工作台的中心位置上方设置有外架,所述工作台上开设有和缝纫机构相配合的缝隙,所述缝纫机构靠近外架的一侧均固定连接有卡齿条,且两个卡齿条之间设置有传动机构;通过在工作台的两侧设置两个缝纫机构,且工作台的中心位置上方设置伺服电机,伺服电机下方中心对称传动连接两个齿轮盘,利用齿轮盘和两个缝纫机构上的卡齿条啮合,实现两个缝纫机构反向运动,同步实现抱枕面料两侧的缝合,但是该专利缝边需要经过两步才能对边缘进行缝合,缝边效率较低,且不能自动翻面,不便于对反面进行多重材料的缝合,多次缝合效率较低。
3、因此,本发明设计了一种感统训练用垫自动翻面缝合设备及方法以解决上述问题。
技术实现思路
1、本发明的目的在于提供一种感统训练用垫自动翻面缝合设备及方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
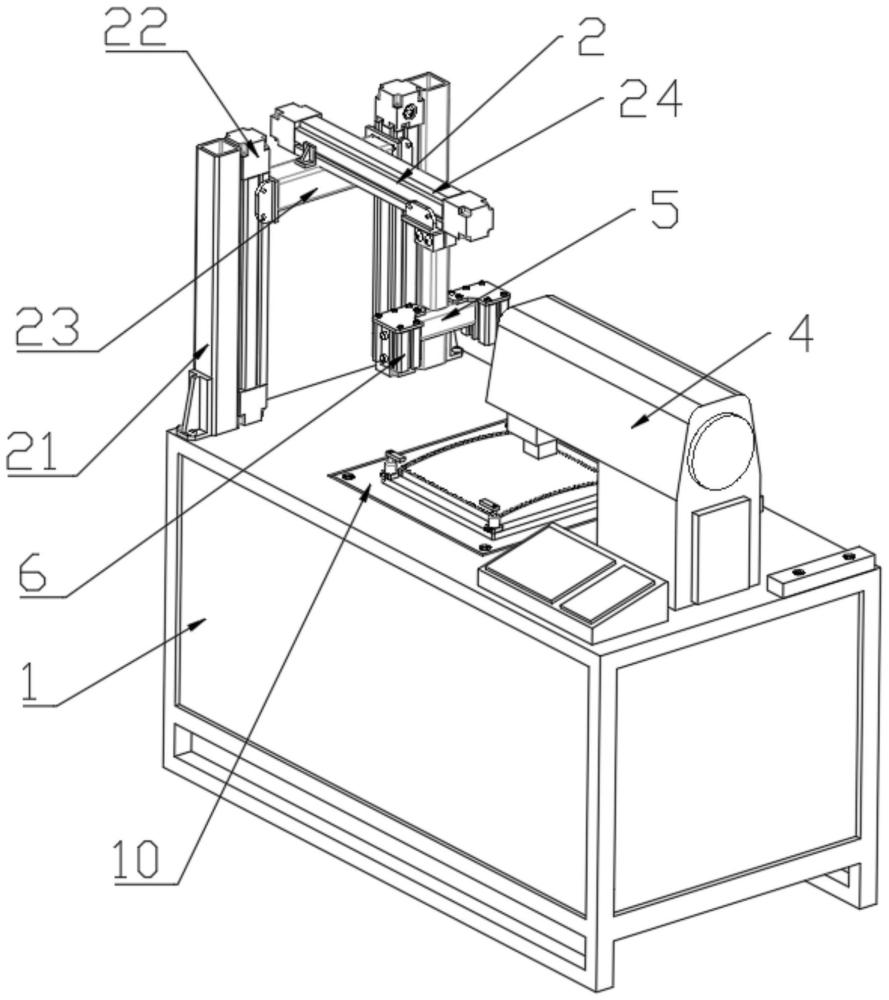
3、一种感统训练用垫自动翻面缝合设备,包括机架,所述机架左侧安装有自动翻面装置,所述机架中侧安装有快速移动装置,所述机架右侧固定安装有自动缝纫机,所述自动翻面装置包括:辅助支架、第一电动直线导轨、横梁、第二电动直线导轨和吸取组件,两个所述辅助支架固定安装在机架左侧,每个所述辅助支架一侧均固定安装有一个第一电动直线导轨,所述横梁固定安装在两个第一电动直线导轨的输出端之间,所述第二电动直线导轨通过支架固定安装在横梁上侧,所述吸取组件安装在第二电动直线导轨的输出端上,所述自动缝纫机为现有技术方案。
4、作为本发明进一步的方案:所述吸取组件包括:t型支架和针式气爪,所述t型支架固定安装在第二电动直线导轨的输出端上,多个所述针式气爪固定安装在t型支架下侧。
5、作为本发明进一步的方案:所述快速移动装置包括:驱动电机、第一挡板、第一滑动框、第二挡板、第二滑动框和鲁洛克斯三角形转动块,所述驱动电机通过支架固定安装在机架内,两个所述第一挡板固定安装在机架内部左右两侧,所述第一滑动框滑动连接在两个第一挡板之间,所两个所述第二挡板固定安装在第一滑动框前后两侧,所述第二滑动框滑动连接在第一滑动框内,所述鲁洛克斯三角形转动块设置在第二滑动框内,所述鲁洛克斯三角形转动块固定安装在驱动电机的输出端,所述鲁洛克斯三角形转动块的形状为鲁洛克斯三角形。
6、作为本发明进一步的方案:所述第二滑动框上侧安装有夹持机构。
7、作为本发明进一步的方案:所述夹持机构包括:连接框、承载板和旋转下压气缸,所述连接框下侧固定安装在第二滑动框上侧,所述承载板固定安装在连接框上侧,多个所述旋转下压气缸固定安装在承载板上侧,所述承载板设置为正方形,所述承载板四个角均设置有旋转下压气缸。
8、作为本发明进一步的方案:所述机架中侧固定安装有防护板,所述防护板中侧设置有方形开孔,所述连接框贯穿方形开孔设置在方形开孔内,防护板用于阻止布料进入其下侧的快速移动装置,避免损坏设备影响生产。
9、为了更好地实现本发明的目的,本发明还提供了一种感统训练用垫自动翻面缝合设备的使用方法,包括以下步骤:
10、步骤一:将两片方形垫子放置在承载板上侧,方形垫子对角与承载板对角对齐,旋转下压气缸启动将方形垫子四个角压住,同时接通自动缝纫机电源和驱动电机电源;
11、步骤二:自动缝纫机电源接通使得设备开始缝制,驱动电机电源接通使得驱动电机转动,快速移动装置的驱动电机转动带动鲁洛克斯三角形转动块转动,鲁洛克斯三角形转动块转动带动第二滑动框移动,第二滑动框移动带动第一滑动框移动,第一滑动框在第一挡板限制下只能沿着x轴移动,第二滑动框在第一滑动框限制下只能沿着y轴移动,使得第二滑动框实现矩形轨迹移动,使得两片方形垫子边缘被快速缝合,旋转下压气缸启动将缝合后的方形垫子四个角释放;
12、步骤三:第一电动直线导轨输出端向下移动带动横梁向下移动,横梁向下移动带动第二电动直线导轨向下移动,第二电动直线导轨向下移动带动t型支架向下移动,t型支架向下移动带动针式气爪向下移动,针式气爪向下移动靠近缝制完成的方形垫子,针式气爪启动将方形垫子靠近承载板左侧的一端抓取,接着第一电动直线导轨输出端向上移动带动横梁向上移动,横梁向上移动带动第二电动直线导轨向上移动,第二电动直线导轨向上移动带动t型支架向上移动,t型支架向上移动带动针式气爪向上移动,针式气爪向上移动使得方形垫子靠近承载板左侧的一端向上移动,方形垫子被抓取呈竖直状态;
13、步骤四:第二电动直线导轨输出端向左移动带动t型支架向左移动,t型支架向左移动带动针式气爪向左移动,针式气爪向左移动使得方形垫子被竖直抓取并向左移动,第二电动直线导轨输出端移动到横梁位置停止移动,接着第二电动直线导轨输出端向右移动同时第一电动直线导轨输出端向下移动,使得方形垫子从竖直状态变成倾斜状态,方形垫子左侧贴近承载板左侧时,针式气爪关闭,方形垫子被放下,同时方形垫子完成了自动翻面,重复步骤一和步骤二进行再次叠加缝制。
14、与现有技术相比,本发明的有益效果是:
15、本发明通过第一电动直线导轨输出端向下移动带动横梁向下移动,横梁向下移动带动第二电动直线导轨向下移动,第二电动直线导轨向下移动带动t型支架向下移动,t型支架向下移动带动针式气爪向下移动,针式气爪向下移动靠近缝制完成的方形垫子,针式气爪启动将方形垫子靠近承载板左侧的一端抓取,接着第一电动直线导轨输出端向上移动带动横梁向上移动,横梁向上移动带动第二电动直线导轨向上移动,第二电动直线导轨向上移动带动t型支架向上移动,t型支架向上移动带动针式气爪向上移动,针式气爪向上移动使得方形垫子靠近承载板左侧的一端向上移动,方形垫子被抓取呈竖直状态,第二电动直线导轨输出端向左移动带动t型支架向左移动,t型支架向左移动带动针式气爪向左移动,针式气爪向左移动使得方形垫子被竖直抓取并向左移动,第二电动直线导轨输出端移动到横梁位置停止移动,接着第二电动直线导轨输出端向右移动同时第一电动直线导轨输出端向下移动,使得方形垫子从竖直状态变成倾斜状态,方形垫子左侧贴近承载板左侧时,针式气爪关闭,方形垫子被放下,同时方形垫子完成了自动翻面,针式气爪上下移动有利于抓取方形垫子进行翻面;
16、快速移动装置的驱动电机转动带动鲁洛克斯三角形转动块转动,鲁洛克斯三角形转动块转动带动第二滑动框移动,第二滑动框移动带动第一滑动框移动,第一滑动框在第一挡板限制下只能沿着x轴移动,第二滑动框在第一滑动框限制下只能沿着y轴移动,使得第二滑动框实现矩形轨迹移动,有利于快速缝制感统训练用垫;
17、将两片方形垫子放置在承载板上侧,方形垫子对角与承载板对角对齐,旋转下压气缸启动将方形垫子四个角压住,有利于快速夹持方形垫子,同时便于方形垫子缝和边和角,有利于进行多层叠加缝和。
本文地址:https://www.jishuxx.com/zhuanli/20240802/260835.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。