一种基于人工智能的自动驾驶转向控制系统
- 国知局
- 2024-08-05 12:15:46
本发明涉及自主道路车辆控制的驱动系统控制系统领域,尤其涉及一种基于人工智能的自动驾驶转向控制系统。
背景技术:
1、在汽车领域,汽车线控转向系统由方向盘总成、转向器总成(含转向控制器)和路感反馈系统(含路感反馈控制器)三个主要部分以及自动防故障系统、电源等辅助系统组成。在车辆执行自动驾驶时,由车辆的高级驾驶辅助系统(advanced driving assistancesystem,adas)根据自身的行驶状态、道路环境、周边车辆等多种因素自动化行驶。在自动化等级较高的自动驾驶过程中,方向盘可能随转向轮发生抖动、偏转等动作。由于自动驾驶过程中方向盘的偏转并非由驾驶员主动控制,所以可能会吸引驾驶员注意力,甚至引发驾驶员紧张焦虑情绪。
2、如cn113581288b现有技术公开了一种自动驾驶横向偏移动态修正方法、装置、设备及存储介质。现有技术中,自动驾驶车辆线控底盘开放的横向控制接口,通常为方向盘角度控制接口,车辆控制器在基于导航数据、传感数据以及对应的横向控制算法,确定方向盘转向角度后,通过该方向盘角度控制接口,基于该方向盘转向角度控制对应的方向盘转向执行机构转动,从而驱动方向盘旋转,完成车辆的横向自主控制。然而,在车辆进行横向自主控制的实际过程中,受到方向盘转向执行机构的执行精度和准确性影响,方向盘的实际转向与基于横向控制算法确定的方向盘转向角度不一致,从而导致了横向自主控制的过程中存在横向偏移的问题,影响自动驾驶功能的安全性和舒适性。
3、另一种典型的如cn113341960b的现有技术公开的一种基于监督式dqn算法的自动驾驶汽车转向控制方法,通过对智能体策略不断训练优化来获得更优的期望奖励,基于深度强化学习的端到端结构可以利用感知输入直接获得油门、刹车、车轮转角等控制动作,大大减少了各层算法构建的工作量和调参成本,同时提升了自动驾驶的泛化能力。
4、为了解决本领域普遍存在转向误差大、无法预判出现的危险、舒适性不佳、交互能力差等等问题,作出了本发明。
技术实现思路
1、本发明的目的在于,针对目前所存在的不足,提出了一种基于人工智能的自动驾驶转向控制系统。
2、为了克服现有技术的不足,本发明采用如下技术方案:
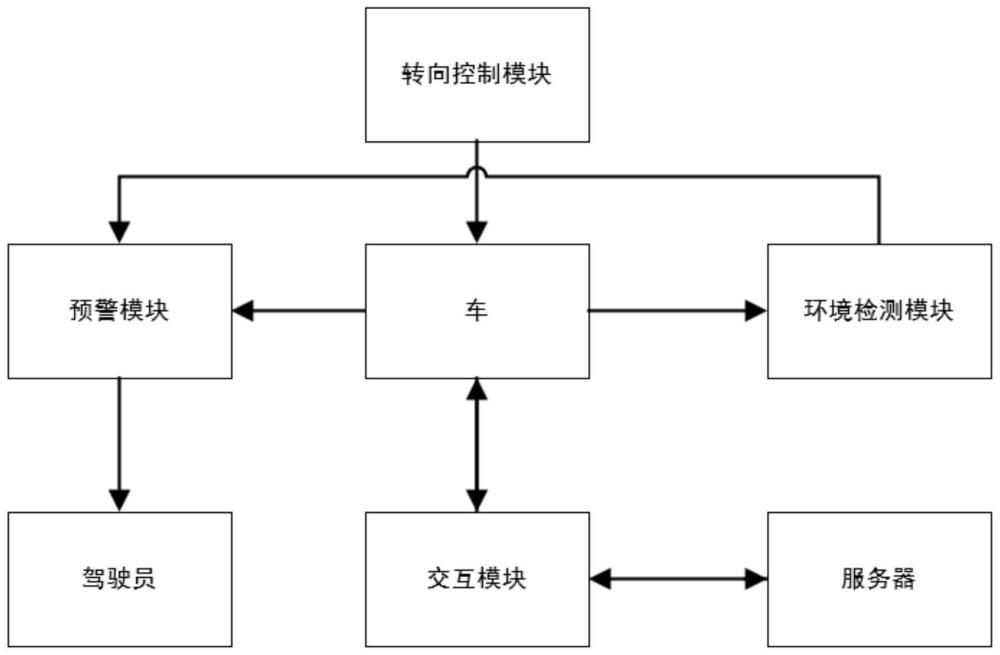
3、一种基于人工智能的自动驾驶转向控制系统,所述自动驾驶转向控制系统包括服务器,所述自动驾驶转向控制系统还包括环境检测模块、转向控制模块、预警模块,
4、所述服务器分别与所述环境检测模块、所述转向控制模块和所述预警模块连接;
5、所述环境检测模块用于对车辆周围的环境进行检测,所述转向控制模块根据所述环境检测模块的检测数据对所述车辆进行转向控制,所述预警模块根据所述环境检测模块和所述转向控制模块的数据进行实时预警,以提示所述驾驶员当前所述车辆所处的预警状态;
6、所述环境检测模块包括激光雷达、定位探头、支撑构件、以及评估单元,所述支撑构件用于对所述激光雷达和定位探头进行支撑,所述激光雷达用于对车辆周围环境和道路宽度的距离进行检测,且所述激光雷达设置在所述车辆上,所述定位探头用于对所述车辆的实时定位位置进行定位;
7、所述评估单元根据所述车辆的实时定位位置和环境数据进行评估,以确定所述车辆第i时刻的转向角度;
8、其中,所述支撑构件包括支撑座、以及设置在所述支撑座中的隐藏腔,所述激光雷达设置在所述隐藏腔中;
9、所述评估单元获取所述获取车辆的自身型号数据参数,以确定所述车辆前轮的理论转向轮转角ω和内前轮的实际转向轮转角ζ,存在:
10、
11、式中,ω为所述车辆的前轮的理论转向轮转角,ζ为所述车辆前轮的实际转向轮转角,d为所述车辆的所述前轮的左右立轴之间的距离,l为所述车辆的轴距;
12、所述车辆的自身型号数据参数包括所述车辆前轮的左右立轴之间的距离d、所述车辆的轴距l和所述车辆前轮的轮销间距a,并根据所述车辆前轮的左右立轴之间的距离d、所述车辆的轴距l计算所述车辆的所述车辆的内前转向轮最大转角γmax:
13、
14、式中,rmin为车辆转弯时的最小转弯半径,a为所述车辆前轮的轮销间距,所述轮销间距a由车辆的自身型号数据参数直接获得;
15、所述评估单元根据下式计算前轮的理想转向轮转角η:
16、
17、式中,m为转向臂长度,θ为转向臂与车辆前向车轮的转动角度;
18、为了使车辆转向过程的稳定性,所述车辆前轮的实际转向轮转角ζ会根据转向时刻i进行动态调整,设车辆的所述前轮的第i个时刻的转向轮转角为ζi,则在该时刻的转向指数turn(ζi)满足:
19、
20、式中,α(ξi)为加权函数,在前轮的理论转向轮转角ω和外前转向轮的理想转向轮转角η之间的相对误差不变时,所述加权函数的值与车辆的所述前轮的第i个时刻的转向轮转角的角度数值ζi呈负相关;
21、若车辆转向过程中同时满足下式,则触发所述转向控制模块对车辆进行转向:
22、
23、式中,g为设定的转向监控阈值,为所述车辆转向后的加速度,为车辆转向前的加速度,am为设定的转弯加速度监控阈值,满足:
24、
25、式中,vt为所述车辆转向操作的安全速度,vo为所述车辆转向前的速度,(rmin·ω)为车辆前轮走过的路程。
26、可选的,所述转向控制模块包括转向控制单元、转向采样单元,所述转向控制单元根据所述评估单元的结果执行对所述车辆的转向控制,所述转向采样单元用于对车辆转向过程的数据进行采样;
27、所述转向控制单元包括转向臂、方向盘、传输杆、制动器、动力传输器,所述方向盘与所述传输杆一端连接,且所述传输杆的另一端与所述转向臂连接形成调整部,所述调整部用于对所述车辆的行驶方向进行调整,所述动力传输器用于驱动所述方向盘,以驱动所述传输杆进行转动;
28、所述动力传输器接收所述环境检测模块的数据,驱动所述方向盘进行转动,所述制动器用于对所述方向盘的传输杆进行制动。
29、可选的,所述预警模块包括预警单元、提示单元和显示屏,所述预警单元获取所述环境检测模块和所述转向采样单元的数据触发预警提示和蜂鸣提示,所述提示单元获取所述环境检测模块和所述转向采样单元的数据在所述显示屏上显示,以向所述驾驶员进行提示;
30、其中,所述提示单元包括数据获取器和可执行程序,所述数据获取器获取所述环境检测模块和所述转向采用单元的数据,并传输至所述显示屏上进行显示,所述可执行程序根据所述数据获取器的数据,在所述显示屏上触发提示弹窗。
31、可选的,所述预警单元包括蜂鸣器和指示灯,所述蜂鸣器用于向所述驾驶员提示的预警警报,所述指示灯根据所述预警警报触发灯光指示。
32、可选的,所述转向采样单元包括一组红外传感器、一组雷达传感器、转向触发器以及数据存储器,所述转向触发器根据车辆的移动路线的转向数据,触发转向侧的所述红外传感器和雷达传感器对转向过程的障碍物和生物活动进行检测;
33、所述红外传感器用于对转向侧的障碍物进行检测,以识别转向侧的生物体活动,所述雷达传感器用于对所述转向侧的障碍物的距离进行检测,所述数据存储器用于对所述红外传感器和所述雷达传感器的数据进行存储。
34、可选的,在所述车辆的两侧均对应设置所述红外传感器和所述雷达传感器,以对车辆转向过程的障碍物的类型和距离进行检测。
35、本发明所取得的有益效果是:
36、1.通过环境检测模块和转向控制模块相互配合,使得车辆能根据车辆所处的环境进行转向,提升车辆能够转向的舒适性和交互能力;
37、2.通过环境检测模块对车辆环境进行检测,并根据车辆所处环境的状态和车辆本身的状态触发转向控制模块对车辆的检测,以提升车辆转向的稳定性、安全性和可靠性;
38、3.通过转向控制单元与转向采样单元相互配合,使得车辆在转向时,根据转向过程的数据进行动态调整转向的角度,以适配不同状态情况下的转向需求;
39、4.通过转向采样单元对转向过程进行检测,预判转向过程中转向路径中出现的障碍物、以及障碍物与车辆之间的距离,以提升车辆转向的安全;
40、5.通过预警单元对车辆转向过程进行预警,促使驾驶员获得最佳的交互舒适性,也进一步提升自动驾驶转向的便捷性和舒适性;
41、6.通过交互模块对车辆转向过程进行引导,有效提升车辆转向操作的安全性和可靠性,同时还兼顾对车辆与道路设备之间的数据交互,促使车辆和道路监控设备的协同交互,保证车辆转向的更加的安全和可靠。
本文地址:https://www.jishuxx.com/zhuanli/20240802/261846.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表