碰撞风险估测方法、装置、设备和可读存储介质与流程
- 国知局
- 2024-08-08 16:56:46
本申请涉及车辆,尤其涉及一种碰撞风险估测方法、装置、设备和可读存储介质。
背景技术:
1、在车辆辅助驾驶中,通过使用传感器和摄像头来检测其他车辆、行人、路标和障碍物,对碰撞风险进行估计,其有助于驾驶员更好地了解车辆周围的环境,预测潜在的碰撞风险,并提高驾驶员的安全性。
2、现有技术中,碰撞风险的估计主要是利用车辆与其他交通参与者之间的距离和相对速度来确定即将发生碰撞的时间,基于该碰撞时间,确定是否存在碰撞可能性。
3、但是,现有的这种的方式,估计准确性较差,驾驶安全性较低。
技术实现思路
1、本申请提供一种碰撞风险估测方法、装置、设备和可读存储介质,用于解决现有碰撞风险估测不准确,导致驾驶安全性差的问题。
2、第一方面,本申请实施例提供一种碰撞风险估测方法,所述方法包括:
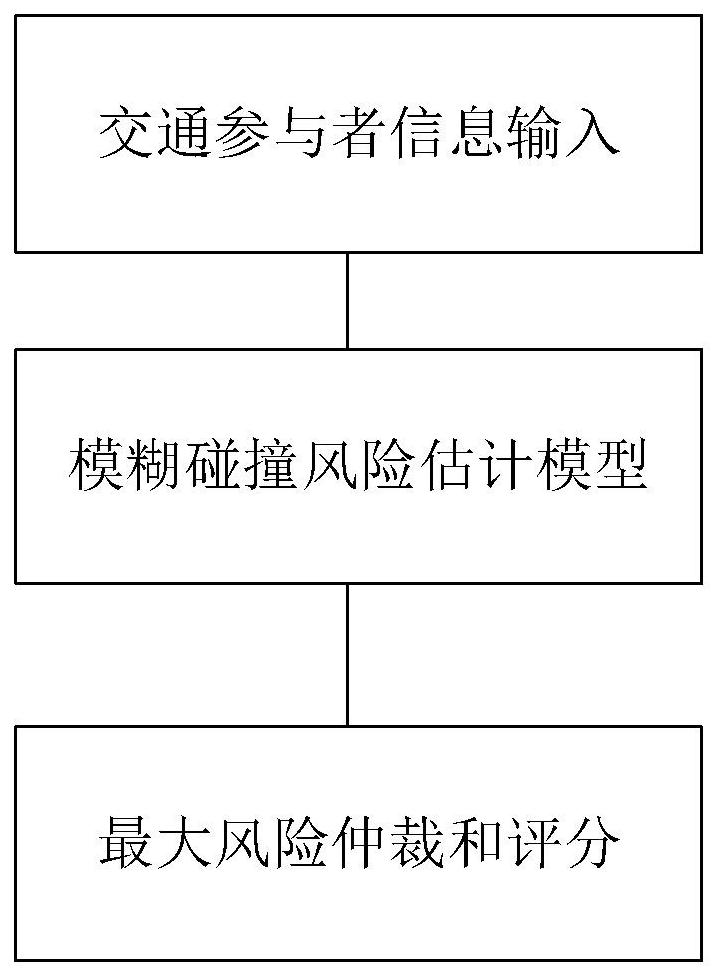
3、获取交通场景中的交通参与者信息;
4、基于所述交通参与者信息,通过模糊推理得到所述车辆与每个交通参与者的碰撞风险值;
5、根据所述碰撞风险值,在所有交通参与者中确定出待避让的目标交通参与者。
6、在第一方面的一种可能设计中,所述方法还包括:
7、获取目标时间段内识别到的交通参与者信息;
8、确定所述交通参与者信息在预设的时长阈值内是否发生更新;
9、若所述交通参与者信息未发生更新,则将所述交通参与者信息删除。
10、在第一方面的另一种可能设计中,所述基于所述交通参与者信息,通过模糊推理得到所述车辆与每个交通参与者的碰撞风险值,包括:
11、基于所述交通参与者信息,确定模糊变量、所述模糊变量的定义域和模糊集合;
12、基于所述模糊变量的定义域、模糊集合和隶属度函数,确定所述模糊变量对各个模糊集合的隶属度;
13、基于所述交通参与者信息、所述模糊变量对各个模糊集合的隶属度,确定出模糊规则;
14、基于所述模糊规则进行模糊推理,获取模糊输出;
15、对所述模糊输出进行去模糊化,得到推理结果,所述推理结果用于表征所述交通参与者的碰撞风险。
16、在第一方面的再一种可能设计中,所述模糊变量包括车辆与交通参与者的相对距离、车辆与交通参与者的相对速度、交通参与者航向角的变化率、交通参与者的历史轨迹的有序性、交通场景的复杂性、交通参与者的机动能力边界。
17、在第一方面的又一种可能设计中,所述方法还包括:
18、基于所述交通参与者信息,获取交通参与者所属的类型、数目、速度、方向、交通参与者的分布情况;
19、根据所述交通参与者所属的类型、数目、速度、方向、交通参与者的分布情况,确定所述交通场景的复杂性。
20、在第一方面的又一种可能设计中,所述根据所述交通参与者所属的类型、数目、速度、方向、交通参与者的分布情况,确定所述交通场景的复杂性,包括:
21、获取配置的权重值;
22、基于所述权重值,对所述交通参与者所属的类型、数目、速度、方向、交通参与者的分布情况进行加权求和,得到所述交通场景的复杂性;
23、或,
24、基于配置的规则和所述交通参与者所属的类型、数目、速度、方向、交通参与者的分布情况,获取所述交通场景的复杂性。
25、在第一方面的又一种可能设计中,所述根据所述碰撞风险值,在所有交通参与者中确定出待避让的目标交通参与者,包括:
26、将各个交通参与者的碰撞风险值进行对比;
27、若存在碰撞风险值最高的第一交通参与者,则将所述第一交通参与者作为所述目标交通参与者;
28、若存在碰撞风险值大小相近的两个以上第二交通参与者,则基于每个第二交通参与者的交通参与者信息,在所述两个以上的第二交通参与者中确定出目标交通参与者。
29、在第一方面的又一种可能设计中,所述基于每个第二交通参与者的交通参与者信息,在所述两个以上的第二交通参与者中确定出目标交通参与者,包括:
30、获取每个第二交通参与者所属的类型、位置、速度中的至少一项;
31、基于每个第二交通参与者所属的类型、位置、速度中的至少一项,确定每个第二交通参与者的避让优先级;
32、获取避让优先级最高的第二交通参与者,作为所述目标交通参与者。
33、第二方面,本申请实施例提供一种碰撞风险估测装置,包括:
34、信息获取模块,用于获取交通场景中的交通参与者信息;
35、风险值推理模块,用于基于所述交通参与者信息,通过模糊推理得到车辆与每个交通参与者的碰撞风险值;
36、目标确定模块,用于根据所述碰撞风险值,在所有交通参与者中确定出待避让的目标交通参与者。
37、第三方面,本申请实施例提供一种电子设备,包括:处理器,以及与所述处理器通信连接的存储器;所述存储器存储计算机执行指令;所述处理器执行所述存储器存储的计算机执行指令,以实现如上述的方法。
38、第四方面,本申请实施例提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现上述的方法。
39、第五方面,本申请实施例提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述的方法。
40、本申请实施例提供的碰撞风险估测方法、装置、设备和可读存储介质,通过结合实际场景下每个交通参与者信息,运用模糊推理计算出本车与每个交通参与者之间的碰撞风险,能够更加适应真实交通场景,准确性更高,从而能够提高车辆安全性。
技术特征:1.一种碰撞风险估测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述方法还包括:
3.根据权利要求1所述的方法,其特征在于,所述基于所述交通参与者信息,通过模糊推理得到车辆与每个交通参与者的碰撞风险值,包括:
4.根据权利要求3所述的方法,其特征在于,所述模糊变量包括车辆与交通参与者的相对距离、车辆与交通参与者的相对速度、交通参与者航向角的变化率、交通参与者的历史轨迹的有序性、交通场景的复杂性、交通参与者的机动能力边界。
5.根据权利要求4所述的方法,其特征在于,所述方法还包括:
6.根据权利要求5所述的方法,其特征在于,所述根据所述交通参与者所属的类型、数目、速度、方向、交通参与者的分布情况,确定所述交通场景的复杂性,包括:
7.根据权利要求1所述的方法,其特征在于,所述根据所述碰撞风险值,在所有交通参与者中确定出待避让的目标交通参与者,包括:
8.根据权利要求7所述的方法,其特征在于,所述基于每个第二交通参与者的交通参与者信息,在所述两个以上的第二交通参与者中确定出目标交通参与者,包括:
9.一种碰撞风险估测装置,其特征在于,包括:
10.一种电子设备,其特征在于,包括:处理器,以及与所述处理器通信连接的存储器;
11.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如权利要求1至8任一项所述的方法。
12.一种计算机程序产品,其特征在于,包括计算机程序,该计算机程序被处理器执行时实现权利要求1-8中任一项所述的方法。
技术总结本申请提供一种碰撞风险估测方法、装置、设备和可读存储介质,涉及车辆技术领域,该方法包括:获取交通场景中的交通参与者信息;基于所述交通参与者信息,通过模糊推理得到所述车辆与每个交通参与者的碰撞风险值;根据所述碰撞风险值,在所有交通参与者中确定出待避让的目标交通参与者。该技术方案中,通过结合实际场景下每个交通参与者信息,运用模糊推理计算出本车与每个交通参与者之间的碰撞风险,能够应用专家经验,更加适应真实交通场景,准确性更高,从而能够提高车辆安全性。技术研发人员:梁增贺受保护的技术使用者:采埃孚商用车系统(青岛)有限公司技术研发日:技术公布日:2024/8/5本文地址:https://www.jishuxx.com/zhuanli/20240808/271365.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。