基于无人自动起降、飞控、作业的指挥车的制作方法
- 国知局
- 2024-08-22 14:22:32
本发明涉及基于无人自动起降、飞控、作业的指挥车,属于指挥车。
背景技术:
1、在无人机巡航领域,无人机的各种配套服务(如充电、控制、维修、存储运输等)也需要跟上,例如,无人机精准起飞与回收是急需解决的问题。
2、如公开(公告)号:cn117622574a所公开的“无人机智能巡检指挥车”,该发明通过控制无人机降落时,无人机落在升降平台上,通过反向启动移动支架,并配合堆垛机将无人机放置到无人机存储平台上的磁吸充电区域,之后监测电量大于90%的无人机,系统通过信号识别将其作为待移位,并再次通过堆垛机对其进行送出,从而实现不间断的巡检。上述发明中的指挥车,具有无人机仓储、对无人机进行升降的升降平台、对无人机进行充电的磁吸充电区域等,上述功能较为单一,尤其是无人机的自动起降、飞控、人机交互等功能都不涉及;同时,对于总重较大的大型无人机或载重无人机在指挥车内的减震技术亦未涉及。
3、基于此,提出本发明。
技术实现思路
1、本发明针对现有技术存在的不足,提供了基于无人自动起降、飞控、作业的指挥车,具体技术方案如下:
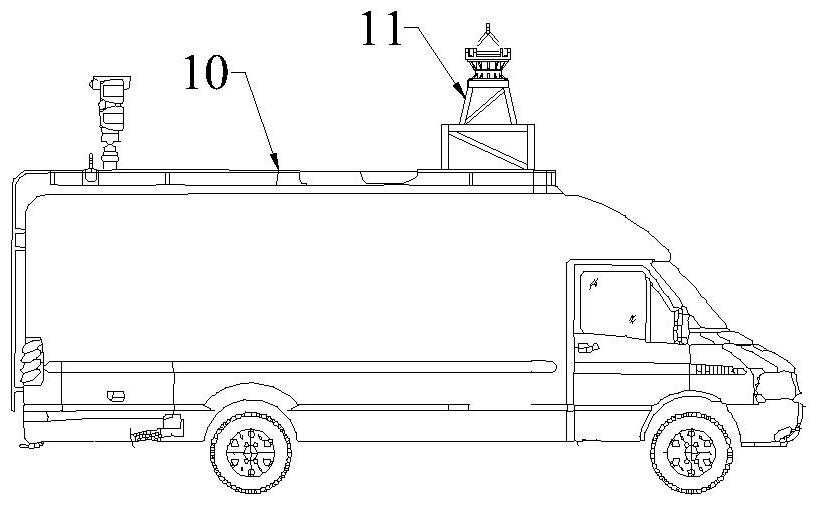
2、基于无人自动起降、飞控、作业的指挥车,包括指挥车本体,所述指挥车本体内部设置有驾驶室、中控室、无人机机库,所述无人机机库内部设置有用于搭载无人机的车载升降台,所述指挥车本体的车顶设置有供无人机进出的自动开关式车顶天窗机构;所述中控室内部设置有交互式显示屏、中控台、用来控制无人机的移动控制终端,所述指挥车本体的车顶安装有信号塔;所述车载升降台与无人机机库的底部之间安装有减震机构。
3、更进一步的改进,所述中控台和移动控制终端均设置有用来控制无人机自动起降的自动起降控制模块、飞控模块,通过自动起降控制模块控制自动开关式车顶天窗机构进行开窗或关窗动作,通过自动起降控制模块控制车载升降台进行升降作业;
4、所述飞控模块用来控制无人机完成起飞、空中飞行、执行任务和返场回收,所述飞控模块包括传感器、机载计算机和伺服作动设备。
5、更进一步的改进,所述无人机包括无人机机体和铁质起落架。
6、更进一步的改进,所述车载升降台为电动剪叉式升降架。
7、更进一步的改进,所述车载升降台的顶部设置有铁质平台,所述铁质平台内部嵌设有电磁棒。
8、更进一步的改进,所述减震机构包括柔性袋、位于柔性袋下方的底板,所述柔性袋的四周设置有导轨机构,所述导轨机构包括第一侧板、与第一侧板相邻设置的第二侧板,所述第一侧板与第二侧板上下交错设置,所述第一侧板与柔性袋的上部固定连接,所述第二侧板与柔性袋的下部固定连接;所述柔性袋的下部与底板固定连接,所述底板与无人机机库的底部固定连接;所述柔性袋内沿着柔性袋上部设置有金属板阵列,所述金属板阵列由多个呈阵列分布的金属板构成,所述金属板与柔性袋的内壁固定连接,相邻两块金属板之间设置有间隙;所述柔性袋的内部设置有容纳室,所述容纳室内填充有非牛顿流体介质;所述容纳室内还设置有对非牛顿流体介质施加剪切力的凸轮往复机构。
9、更进一步的改进,所述凸轮往复机构包括连板、位于连板上方的三角凸轮、主轴,所述连板的两端设置有推头和限位扣,所述推头与连板的端部一体化连接,所述柔性袋的下部嵌设有安装板,所述安装板与底板固定连接,所述主轴与安装板垂直设置且转动连接,所述连板的中部沿着连板的长度方向设置有供主轴活动的腰圆孔,所述限位扣套设在连板的外部且限位扣与安装板固定连接,所述连板上转动连接有两个滚轮,其中一个滚轮位于三角凸轮的一侧,另一个滚轮位于三角凸轮的另一侧,所述主轴与三角凸轮的中央同轴连接;所述三角凸轮设置有三个呈中心对称的曲面凸部,相邻两个曲面凸部设置有弧形过渡部;所述三角凸轮外周轮廓的三条中线相等,所述主轴的轴向与三角凸轮外周轮廓的几何中心共线。
10、更进一步的改进,所述三角凸轮外周轮廓为三角凸轮几何结构,三角凸轮外周轮廓的几何中心为重心点,三角凸轮几何结构上任意两点所连接形成的线段为弦线段,经过重心点的弦线段为过心弦线段,三角凸轮几何结构上的任意两条过心弦线段均相等。
11、更进一步的改进,所述推头的横截面为椭圆形结构,推头的长轴与连板的长度方向呈垂直设置,所述推头的上端面设置有斜面,所述推头的厚度按照靠近连板的方向呈连续增大设置。
12、更进一步的改进,所述非牛顿流体介质为淀粉和水按照质量比3:1混合制成。
13、本发明的有益效果:
14、1、本发明所述指挥车具有匹配无人机自动起降、飞控、仓储和作业等多种功能,应用范围广,经济价值高。
15、2、所述指挥车内还设置有减震效果优良的减震机构,尤其适用于总重较大的大型无人机或载重无人机的作业。
技术特征:1.基于无人自动起降、飞控、作业的指挥车,包括指挥车本体(10),其特征在于:所述指挥车本体(10)内部设置有驾驶室、中控室、无人机机库,所述无人机机库内部设置有用于搭载无人机的车载升降台(50),所述指挥车本体(10)的车顶设置有供无人机进出的自动开关式车顶天窗机构;所述中控室内部设置有交互式显示屏、中控台、用来控制无人机的移动控制终端,所述指挥车本体(10)的车顶安装有信号塔(11);所述车载升降台(50)与无人机机库的底部之间安装有减震机构(30)。
2.根据权利要求1所述的基于无人自动起降、飞控、作业的指挥车,其特征在于:所述中控台和移动控制终端均设置有用来控制无人机自动起降的自动起降控制模块、飞控模块,通过自动起降控制模块控制自动开关式车顶天窗机构进行开窗或关窗动作,通过自动起降控制模块控制车载升降台(50)进行升降作业;
3.根据权利要求1所述的基于无人自动起降、飞控、作业的指挥车,其特征在于:所述无人机包括无人机机体(21)和铁质起落架(22)。
4.根据权利要求3所述的基于无人自动起降、飞控、作业的指挥车,其特征在于:所述车载升降台(50)为电动剪叉式升降架。
5.根据权利要求3所述的基于无人自动起降、飞控、作业的指挥车,其特征在于:所述车载升降台(50)的顶部设置有铁质平台,所述铁质平台内部嵌设有电磁棒(51)。
6.根据权利要求1所述的基于无人自动起降、飞控、作业的指挥车,其特征在于:所述减震机构(30)包括柔性袋(31)、位于柔性袋(31)下方的底板(40),所述柔性袋(31)的四周设置有导轨机构,所述导轨机构包括第一侧板(321)、与第一侧板(321)相邻设置的第二侧板(322),所述第一侧板(321)与第二侧板(322)上下交错设置,所述第一侧板(321)与柔性袋(31)的上部固定连接,所述第二侧板(322)与柔性袋(31)的下部固定连接;所述柔性袋(31)的下部与底板(40)固定连接,所述底板(40)与无人机机库的底部固定连接;所述柔性袋(31)内沿着柔性袋(31)上部设置有金属板阵列,所述金属板阵列由多个呈阵列分布的金属板(33)构成,所述金属板(33)与柔性袋(31)的内壁固定连接,相邻两块金属板(33)之间设置有间隙;所述柔性袋(31)的内部设置有容纳室(34),所述容纳室(34)内填充有非牛顿流体介质;所述容纳室(34)内还设置有对非牛顿流体介质施加剪切力的凸轮往复机构。
7.根据权利要求6所述的基于无人自动起降、飞控、作业的指挥车,其特征在于:所述凸轮往复机构包括连板(62)、位于连板(62)上方的三角凸轮(63)、主轴(61),所述连板(62)的两端设置有推头(66)和限位扣(65),所述推头(66)与连板(62)的端部一体化连接,所述柔性袋(31)的下部嵌设有安装板(311),所述安装板(311)与底板(40)固定连接,所述主轴(61)与安装板(311)垂直设置且转动连接,所述连板(62)的中部沿着连板(62)的长度方向设置有供主轴(61)活动的腰圆孔(621),所述限位扣(65)套设在连板(62)的外部且限位扣(65)与安装板(311)固定连接,所述连板(62)上转动连接有两个滚轮(64),其中一个滚轮(64)位于三角凸轮(63)的一侧,另一个滚轮(64)位于三角凸轮(63)的另一侧,所述主轴(61)与三角凸轮(63)的中央同轴连接;所述三角凸轮(63)设置有三个呈中心对称的曲面凸部(631),相邻两个曲面凸部(631)设置有弧形过渡部(632);所述三角凸轮(63)外周轮廓的三条中线相等,所述主轴(61)的轴向与三角凸轮(63)外周轮廓的几何中心共线。
8.根据权利要求7所述的基于无人自动起降、飞控、作业的指挥车,其特征在于:所述三角凸轮(63)外周轮廓为三角凸轮几何结构,三角凸轮(63)外周轮廓的几何中心为重心点,三角凸轮几何结构上任意两点所连接形成的线段为弦线段,经过重心点的弦线段为过心弦线段,三角凸轮几何结构上的任意两条过心弦线段均相等。
9.根据权利要求7所述的基于无人自动起降、飞控、作业的指挥车,其特征在于:所述推头(66)的横截面为椭圆形结构,推头(66)的长轴与连板(62)的长度方向呈垂直设置,所述推头(66)的上端面设置有斜面(651),所述推头(66)的厚度按照靠近连板(62)的方向呈连续增大设置。
10.根据权利要求1所述的基于无人自动起降、飞控、作业的指挥车,其特征在于:所述非牛顿流体介质为淀粉和水按照质量比3:1混合制成。
技术总结本发明涉及基于无人自动起降、飞控、作业的指挥车,包括指挥车本体,指挥车本体内部设置有驾驶室、中控室、无人机机库,无人机机库内部设置有用于搭载无人机的车载升降台,指挥车本体的车顶设置有供无人机进出的自动开关式车顶天窗机构;中控室内部设置有交互式显示屏、中控台、用来控制无人机的移动控制终端,指挥车本体的车顶安装有信号塔;车载升降台与无人机机库的底部之间安装有减震机构。本发明所述指挥车具有匹配无人机自动起降、飞控、仓储和作业的多种功能,应用范围广,减震机构的减震效果优良,尤其适用于总重较大的大型无人机或载重无人机的作业。技术研发人员:张传林受保护的技术使用者:安徽中云智能科技有限公司技术研发日:技术公布日:2024/8/20本文地址:https://www.jishuxx.com/zhuanli/20240822/278417.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表