一种基于铸造件有序位姿的缺陷检测方法与流程
- 国知局
- 2024-08-22 14:51:35
本发明涉及机器视觉辅助机器人铸造清理,尤其涉及一种基于铸造件有序位姿的缺陷检测方法。
背景技术:
1、自动化技术的飞速发展使得机器人逐渐代替人工在环境恶劣的情况下工作。铸造后杂质的清理对铸造件最终的质量至关重要,现有技术中,利用深度相机能够得到铸造件完整的三维点云模型,但利用点云处理技术直接对复杂的初始点云数据进行缺陷特征识别与计算分析十分复杂,技术细节难以实现,研发成本较高。
技术实现思路
1、本发明提供一种基于铸造件有序位姿的缺陷检测方法,以克服上述技术问题。
2、为了实现上述目的,本发明的技术方案是:
3、一种基于铸造件有序位姿的缺陷检测方法,包括如下步骤:
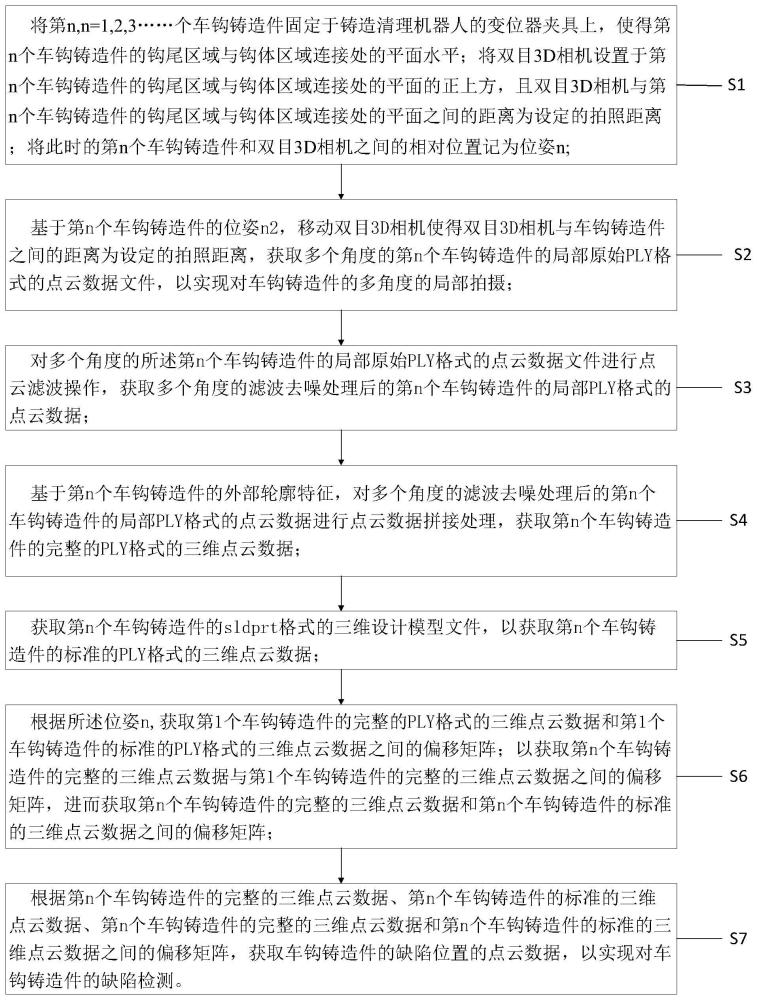
4、s1:将第n,n=1,2,3……个车钩铸造件固定于作业机器人的变位器夹具上,使得第n个车钩铸造件的钩尾区域与钩体区域连接处的平面水平;
5、将双目3d相机设置于第n个车钩铸造件的钩尾区域与钩体区域连接处的平面的正上方,且双目3d相机与第n个车钩铸造件的钩尾区域与钩体区域连接处的平面之间的距离为设定的拍照距离;将此时的第n个车钩铸造件和双目3d相机之间的相对位置记为位姿n;其中,n表示待进行检测的车钩铸造件的安装序号;所述位姿n包括与第n个车钩铸造件对应的移动双目3d相机的位姿n1和第n个车钩铸造件的位姿n2;
6、s2:基于第n个车钩铸造件的位姿n2,移动双目3d相机使得双目3d相机与车钩铸造件表面之间的距离为设定的拍照距离,获取多个角度的第n个车钩铸造件的局部原始ply格式的点云数据文件,以实现对车钩铸造件的多角度的局部拍摄;
7、s3:对多个角度的所述第n个车钩铸造件的局部原始ply格式的点云数据文件进行点云滤波操作,获取多个角度的滤波去噪处理后的第n个车钩铸造件的局部ply格式的点云数据;
8、s4:基于第n个车钩铸造件的外部轮廓特征,对多个角度的滤波去噪处理后的第n个车钩铸造件的局部ply格式的点云数据进行点云数据拼接处理,获取第n个车钩铸造件的完整的ply格式的三维点云数据;
9、s5:获取第n个车钩铸造件的sldprt格式的三维设计模型文件,以获取第n个车钩铸造件的标准的ply格式的三维点云数据;
10、s6:获取第1个车钩铸造件的完整的ply格式的三维点云数据和第1个车钩铸造件的标准的ply格式的三维点云数据之间的偏移矩阵;以获取第n个车钩铸造件的完整的三维点云数据与第1个车钩铸造件的完整的三维点云数据之间的偏移矩阵,进而获取第n个车钩铸造件的完整的三维点云数据和第n个车钩铸造件的标准的三维点云数据之间的偏移矩阵;
11、s7:根据第n个车钩铸造件的完整的三维点云数据、第n个车钩铸造件的标准的三维点云数据、第n个车钩铸造件的完整的三维点云数据和第n个车钩铸造件的标准的三维点云数据之间的偏移矩阵,获取车钩铸造件的缺陷位置的点云数据,以实现对车钩铸造件的缺陷检测。
12、进一步的,获取第n个车钩铸造件的完整的三维点云数据和第n个车钩铸造件的标准的三维点云数据之间的偏移矩阵所采用公式如下:
13、c=ab
14、式中:c为第n个车钩铸造件的完整的三维点云数据和第n个车钩铸造件的标准的三维点云数据之间的偏移矩阵;a为第1个车钩铸造件的完整的ply格式的三维点云数据和第1个车钩铸造件的标准的ply格式的三维点云数据之间的偏移矩阵;b为第n个车钩铸造件的完整的三维点云数据与第1个车钩铸造件的完整的三维点云数据之间的偏移矩阵。
15、进一步的,获取第n个车钩铸造件的标准的三维点云数据所采用方法如下:
16、s51:将第n个车钩铸造件的sldprt格式的三维设计模型文件转换为obj格式的文件;
17、s52:将第n个车钩铸造件的obj格式的文件转换为stl格式的文件;
18、s53:将第n个车钩铸造件的stl格式的文件转换为ply格式的点云文件,以获取第n个车钩铸造件的标准的ply格式的三维点云数据。
19、进一步的,获取车钩铸造件的缺陷位置的点云数据所采用公式如下:
20、
21、式中:q表示车钩铸造件的缺陷位置的点云数据;n表示第n个车钩铸造件的完整的三维点云数据;c表示第n个车钩铸造件的完整的三维点云数据和第n个车钩铸造件的标准的三维点云数据之间的偏移矩阵;s表示第n个车钩铸造件的完整的三维点云数据。
22、进一步的,所述设定的拍照距离为500mm。
23、有益效果:本发明的一种基于铸造件有序位姿的缺陷检测方法,通过第1个车钩铸造件的完整的ply格式的三维点云数据和第1个车钩铸造件的标准的ply格式的三维点云数据之间的偏移矩阵,以及第n个车钩铸造件的完整的三维点云数据与第1个车钩铸造件的完整的三维点云数据之间的偏移矩阵,获取第n个车钩铸造件的完整的三维点云数据和第n个车钩铸造件的标准的三维点云数据之间的偏移矩阵,以获取车钩铸造件的缺陷位置的点云数据,实现对车钩铸造件的缺陷检测。确保了铸造件实际点云与数模点云配准的精度,并避免了直接利用点云处理技术逐步对复杂的缺陷特征进行的分析计算,从而降低了点云处理难度,节省了开发成本与时间。
技术特征:1.一种基于铸造件有序位姿的缺陷检测方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于铸造件有序位姿的缺陷检测方法,其特征在于,获取第n个车钩铸造件的完整的三维点云数据和第n个车钩铸造件的标准的三维点云数据之间的偏移矩阵所采用公式如下:
3.根据权利要求1所述的一种基于铸造件有序位姿的缺陷检测方法,其特征在于,获取第n个车钩铸造件的标准的三维点云数据所采用方法如下:
4.根据权利要求1所述的一种基于铸造件有序位姿的缺陷检测方法,其特征在于,获取车钩铸造件的缺陷位置的点云数据所采用公式如下:
5.根据权利要求1所述的一种基于铸造件有序位姿的缺陷检测方法,其特征在于,所述设定的拍照距离为500mm。
技术总结本发明公开了一种基于铸造件有序位姿的缺陷检测方法,通过第1个车钩铸造件的完整的PLY格式的三维点云数据和第1个车钩铸造件的标准的PLY格式的三维点云数据之间的偏移矩阵,以及第n个车钩铸造件的完整的三维点云数据与第1个车钩铸造件的完整的三维点云数据之间的偏移矩阵,获取第n个车钩铸造件的完整的三维点云数据和第n个车钩铸造件的标准的三维点云数据之间的偏移矩阵,以获取车钩铸造件的缺陷位置的点云数据,实现对车钩铸造件的缺陷检测。确保了铸造件实际点云与数模点云配准的精度,并避免了直接利用点云处理技术逐步对复杂的缺陷特征进行的分析计算,从而降低了点云处理难度,节省了开发成本与时间。技术研发人员:于健,李炳萱,陈广泰,穆禹丞,赵博,秦兆伯受保护的技术使用者:中车科技创新(北京)有限公司技术研发日:技术公布日:2024/8/20本文地址:https://www.jishuxx.com/zhuanli/20240822/280155.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。