认知雷达微弱目标距离走动下的检测前跟踪方法及装置
- 国知局
- 2024-08-22 14:55:27
本发明涉及雷达数据处理,尤其涉及一种认知雷达微弱目标距离走动下的检测前跟踪方法及装置。
背景技术:
1、动态规划算法把航迹搜索问题看作是最优化问题,将连续多帧的能量积累过程转化为多个阶段的递推积累形式,逐个求解每一阶段的能量积累最大值对应的子航迹,由这些子航迹构成一条最优航迹,如果对应的能量积累值大于检测门,那么判这条最优航迹为目标航迹。
2、传统的雷达目标检测-解模糊-目标跟踪流程由于需要设置门限检测来筛选目标,可能将低信噪比目标视为噪声直接剔除掉,导致该流程较难进行低可观测目标的检测与跟踪。基于动态规划的检测前跟踪(dp-tbd)算法根据目标在帧间的相关性,对多帧量测数据范围搜索并进行值函数累积,目标会在最后一帧达到值函数最高值,而噪声由于随机性并不会帧间积累,此时对最后一帧数据进行门限判决即可检测到微弱目标。因此dp-tbd算法被广泛应用于低可观测目标的检测与跟踪,对dp-tbd算法的研究是有必要的。
3、针对低可观测目标的检测与跟踪问题,有人提出先进行检测前跟踪技术(track-before-detect,tbd)处理提高微弱目标的检测性能,再进行解模糊处理解决目标的距离模糊性。该方法有效解决了低信噪比目标的检测与跟踪,但仍存在两个问题:1)雷达检测高速目标时,容易出现目标距离走动问题,此时进行距离延拓后不同重频下的同一目标的距离门数无法对应起来,解距离模糊处理结果会出现较大的误差,导致最终输出结果存在偏差;2)直接对雷达不同帧之间的量测数据进行dp-tbd(检测前跟踪动态规划,dynamicprogramming-track before detect)处理,其状态转移步长过长,搜索区间过大,导致处理效率偏低,工程实用性不高。
技术实现思路
1、本发明通过提供一种认知雷达微弱目标距离走动下的检测前跟踪方法及装置,解决了现有技术中直接对雷达不同帧之间的量测数据进行dp-tbd处理,其状态转移步长过长,搜索区间过大,导致处理效率偏低,工程实用性不高的问题,实现了在低snr下实现高速目标跟踪,受到距离走动的影响小,适用范围广。
2、第一方面,本发明提供了一种认知雷达微弱目标距离走动下的检测前跟踪方法,该方法包括:
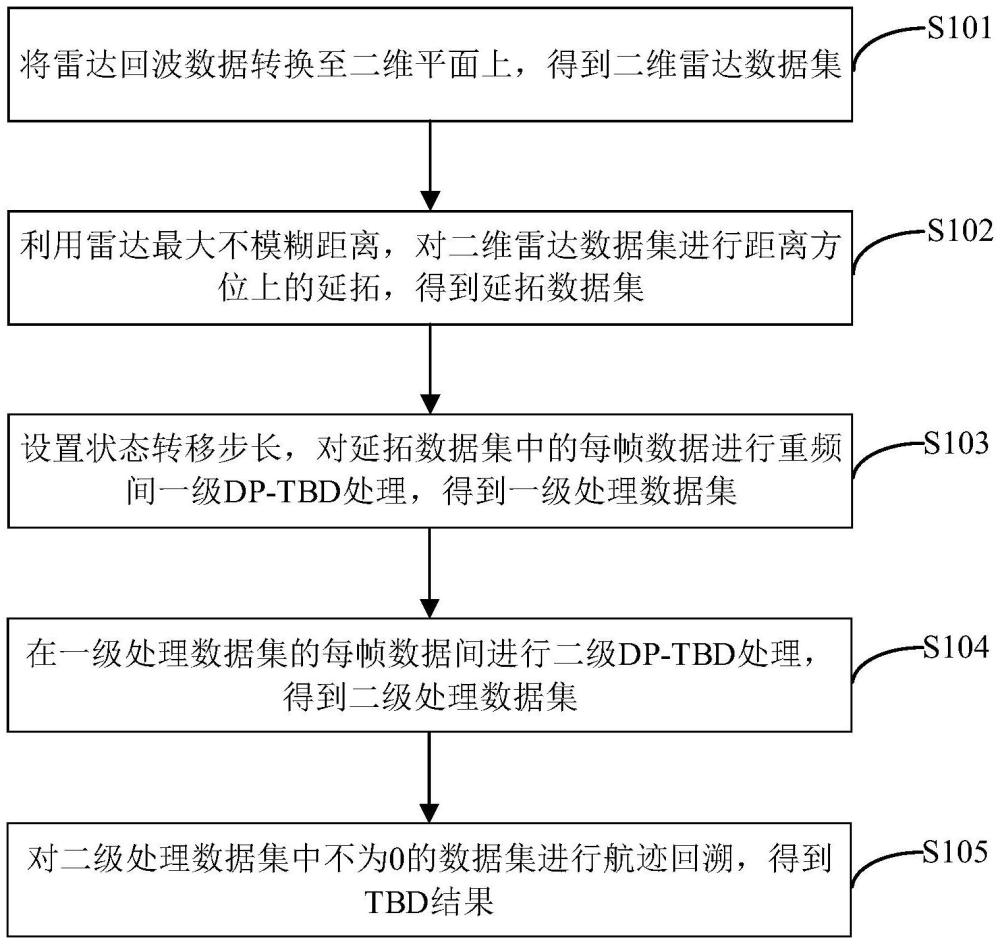
3、将雷达回波数据转换至二维平面上,得到二维雷达数据集;
4、利用雷达最大不模糊距离,对所述二维雷达数据集进行距离方位上的延拓,得到延拓数据集;
5、设置状态转移步长,对所述延拓数据集中的每帧数据进行重频间一级dp-tbd处理,得到一级处理数据集;
6、在所述一级处理数据集的每帧数据间进行二级dp-tbd处理,得到二级处理数据集;
7、对所述二级处理数据集中不为0的数据集进行航迹回溯,得到tbd结果。
8、结合第一方面,在一种可能的实现方式中,所述利用雷达最大不模糊距离,对所述二维雷达数据集进行距离方位上的延拓,得到延拓数据集,包括:
9、对所述二维雷达数据集中各帧中的各个重频获得的所有量测点进行距离延拓,具体延拓公式表示为:
10、
11、其中,表示雷达在第n帧m个重频数据上经过距离延拓后的距离信息;表示第n帧第m个重频上的量测点对应的视在距离门;η表示距离延拓次数;表示第n帧第m个重频对应的最远不模糊距离;表示目标的幅度信息;rmax表示雷达最远探测距离;表示第n帧第m个重频上的量测点对应的角度;用来计算距离延拓次数;m表示重频数;n表示帧数。
12、结合第一方面,在一种可能的实现方式中,所述设置状态转移步长,对所述延拓数据集中的每帧数据进行重频间一级dp-tbd处理,得到一级处理数据集,包括:
13、将所述延拓数据集转换为x-y平面的量测矩阵,分别计算各帧的第一值函数积累值;
14、利用预设第一门限值vh1分别对n帧数据的所述第一值函数积累值进行判断,若则将对应n帧数据的上第m个重频数据对应的量测矩阵设置为0;若则对应帧上第m个重频数据对应的量测矩阵不变;
15、对不为0的所述量测矩阵进行航迹回溯,得到一级处理数据集。
16、结合第一方面,在一种可能的实现方式中,所述第一值函数积累值表示为:
17、
18、
19、其中,表示第n帧第m个重频上的量测点对应的视在距离门;表示第n帧第m个重频的量测矩阵;表示第n帧第m个重频上的量测点对应的角度;表示目标的幅度信息;表示第n帧第m个重频上的函数积累值;表示第n帧第m-1个重频上最大值函数对应的状态。
20、结合第一方面,在一种可能的实现方式中,所述在所述一级处理数据集的每帧数据间进行二级dp-tbd处理,得到二级处理数据集,包括:
21、计算所述一级处理数据集各帧数据的第二值函数累积值;
22、利用预设第二门限值vh2分别对各帧数据的第二值函数累积值in进行判断,若in+w-1<vh2,则每帧数据最后一帧对应的量测矩阵设置为0;若in+w-1≤vh2,则则每帧数据最后一帧对应的量测矩阵不变,得到二级处理数据集。
23、结合第一方面,在一种可能的实现方式中,所述第二值函数累积值表示为:
24、
25、
26、其中,in-1表示第n-1帧对应的最大值函数;zn表示第n帧的量测矩阵;sn表示第n帧的二级dp-tbd结果;θn表示第n帧目标的角度;an表示第n帧目标的幅度;in-1表示第n-1帧对应的最大值函数;xn-1表示第n-1帧最大值函数对应的状态。
27、第二方面,本发明提供了一种认知雷达微弱目标距离走动下的检测前跟踪装置,该装置包括:
28、数据转换模块,用于将雷达回波数据转换至二维平面上,得到二维雷达数据集;
29、数据延拓模块,用于利用雷达最大不模糊距离,对所述二维雷达数据集进行距离方位上的延拓,得到延拓数据集;
30、一级dp-tbd处理模块,用于设置状态转移步长,对所述延拓数据集中的每帧数据进行重频间一级dp-tbd处理,得到一级处理数据集;
31、二级dp-tbd处理模块,用于在所述一级处理数据集的每帧数据间进行二级dp-tbd处理,得到二级处理数据集;
32、输出模块,用于对所述二级处理数据集中不为0的数据集进行航迹回溯,得到tbd结果,并进行输出。
33、第三方面,本发明提供了一种机载认知雷达降低目标漏警概率的检测前跟踪服务器,该服务器包括存储器和处理器;
34、所述存储器用于储存计算机可执行指令;
35、所述处理器用于执行所述计算机可执行指令,以实现认知雷达微弱目标距离走动下的检测前跟踪方法。
36、第四方面,本发明提供了一种计算机可读存储介质,所述计算机可读存储介质有可执行指令,计算机执行所述可执行指令时能够实现认知雷达微弱目标距离走动下的检测前跟踪方法。
37、本发明中提供的一个或多个技术方案,至少具有如下技术效果或优点:
38、(1)本发明通过第一级tbd处理为重频间tbd处理,由于目标在一个cpi内的位移较短,因此状态转移步长较小,搜索区间小,提高了处理速度;
39、(2)本发明通过二级dp-tbd处理范围搜索的特性解决了距离走动问题,得到的目标航迹更准确;
40、(3)本发明能在低snr下实现多目标高速运动的检测与跟踪,适用范围非常广。
本文地址:https://www.jishuxx.com/zhuanli/20240822/280421.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表