一种海底行走机器人数字孪生系统与姿态控制结构
- 国知局
- 2024-09-05 14:47:54
本发明属于水下机器人控制领域,涉及了一种海底行走机器人数字孪生系统与姿态控制结构。
背景技术:
1、目前,伴随着深海探索、开发的进程,海底资源开发、海底资源探索、海底科学考察、探测等方面在海洋经济、海洋科学研究领域占据着越来越重要的地位;海底行走机器人能够近距离、长时间、高稳定性的进行海底作业,因此也扮演者越来越重要的角色。但海底地形复杂、海底底质细软,海底机器人在工作过程中的沉陷、打滑等问题是其工作过程中急需解决的痛点。
2、中国专利(公开号:cn117162067a)公开了一种用于海底电缆检测的行走机器人,其公开了一种通过从动轮驱动和阻尼器缓冲的方式来克服检测设备在检测过程中发生晃动;中国专利(cn106926995b)公开了一种适于海底环境的行走机器人,其公开了一种六足爬行式海底行走机器人;上述专利中关于海底行走机器人的方案更关注于行走的方式的改进和创新,但均缺乏对海底复杂环境机器人姿态控制的方案。因此,本发明提出一种自主调节、终端协同观测控制相结合的一种海底行走机器人数字孪生系统与姿态控制结构。
技术实现思路
1、针对上述问题,本发明目的是提出了一种海底行走机器人数字孪生系统与姿态控制结构。
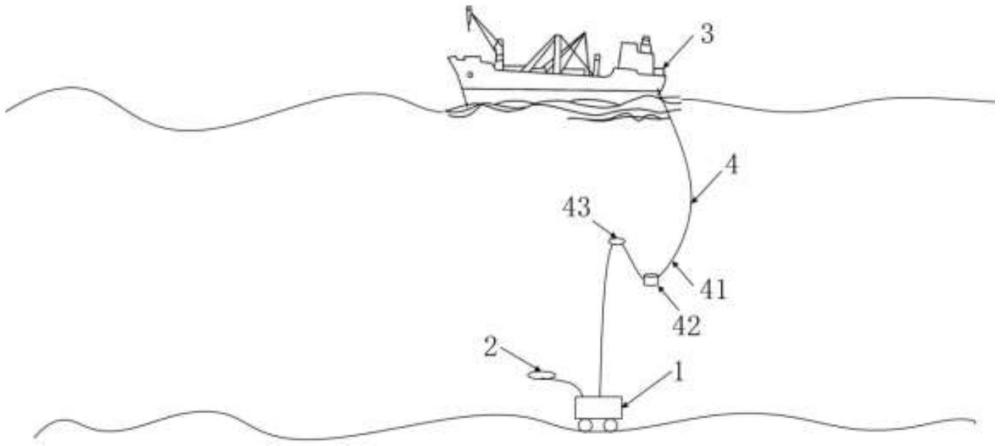
2、本发明的技术方案是:本发明所述的一种海底行走机器人数字孪生系统与姿态控制结构,包括海底行走机器人、地形探测机器人、海面支持船、及脐带缆系统,所述海底行走机器人的一侧通过安置的脐带缆线连接在地形探测机器人上,所述海底行走机器人的尾部连续连接在脐带缆系统及海面支持船上;
3、所述海底行走机器人包括姿态传感器及重心控制器,所述重心控制器包括固接的内侧齿轮环及外侧齿轮环;
4、所述外侧齿轮环为圆环形且内侧带有齿轮的传动结构,其外侧与海底行走机器人固定连接;
5、所述内侧齿轮环为圆环形且外侧部带有齿轮的传动结构,在其内侧安置有固定支板,在所述固定支板相互连接的中心位置连接有姿态传感器。
6、进一步的,在所述固定支板的底侧安置有固定底座,
7、所述重心控制器的内侧通过固定板架分别与姿态传感器和固定底座固定连接。
8、进一步的,在所述内侧齿轮环与外侧齿轮环的顶端均安置有上部滑动轴承,在所述内侧齿轮环与外侧齿轮环的底端均安置有下部滑动轴承。
9、进一步的,在所述内侧齿轮环的外壁处与外侧齿轮环的内壁处安置有对称性的两个传动齿轮轴,在所述传动齿轮轴的上端均安置有电动机,在所述传动齿轮轴的下端均安置有重心调节配重块;所述电动机、重心调节配重块通过传动齿轮轴固定铆接。
10、进一步的,所述传动齿轮轴的外壁分别与外侧齿轮环的外壁、外侧齿轮环的内壁相适配,所述外侧齿轮环、内侧齿轮环及传动齿轮轴通过齿轮啮合连接形成完整的齿轮传动系统;
11、所述电动机的底侧与上部滑动轴承接触,
12、所述重心调节配重块的顶侧与下部滑动轴承接触。
13、进一步的,所述海底行走机器人还包括行走控制器、水下处理器及信息集成与收发器,
14、所述水下处理器分别与姿态传感器、重心控制器、行走控制器及信息集成与收发器相互连接。
15、进一步的,所述水下处理器还与地形探测机器人相连,
16、所述信息集成与收发器与海面支持船相连。
17、进一步的,在所述地形探测机器人上搭载有地形探测器。
18、进一步的,所述海面支持船包括相互连接的水面处理器、显示器及命令端,
19、所述命令端的输出端连接在水面处理器的输入端上,所述水面处理器的输出端连接在显示器的输入端上。
20、进一步的,所述的脐带缆系统包括连接海底行走机器人与海面支持船的脐带缆、配重块及浮力块,所述的配重块及浮力块分别布置在脐带缆上。
21、本发明的基本原理在于:1、通过信息获取与传输技术,实现了海底机器人与海面支持船的实时交互,组成了一套海底行走机器人数字孪生系统;2、本发明通过齿轮传动原理和重心调节技术,实现了海底行走机器人的实时姿态控制。
22、本发明的有益效果是:1、本发明通过构建海底行走机器人数字孪生系统可以对深海行走机器人作业工况、运行姿态进行实时观察与控制,有利于深海行走机器人作业的开展和运行维护;2、本发明通过重心调节模块的结构设计以及其与姿态传感器的组合设计,能够适应海底的复杂地形和物性,保证海底机器人的稳定行走。
技术特征:1.一种海底行走机器人数字孪生系统与姿态控制结构,其特征在于,包括海底行走机器人(1)、地形探测机器人(2)、海面支持船(3)及脐带缆系统(4),所述海底行走机器人(1)的一侧通过安置的脐带缆线连接在地形探测机器人(2)上,所述海底行走机器人(1)的尾部连续连接在脐带缆系统(4)及海面支持船(3)上;
2.根据权利要求1所述的一种海底行走机器人数字孪生系统与姿态控制结构,其特征在于,在所述固定支板(124)的底侧安置有固定底座(128),
3.根据权利要求1所述的一种海底行走机器人数字孪生系统与姿态控制结构,其特征在于,在所述内侧齿轮环(121)与外侧齿轮环(120)的顶端均安置有上部滑动轴承(122),在所述内侧齿轮环(121)与外侧齿轮环(120)的底端均安置有下部滑动轴承(123)。
4.根据权利要求3所述的一种海底行走机器人数字孪生系统与姿态控制结构,其特征在于,在所述内侧齿轮环(121)的外壁处与外侧齿轮环(120)的内壁处安置有对称性的两个传动齿轮轴(127),在所述传动齿轮轴(127)的上端均安置有电动机(125),在所述传动齿轮轴(127)的下端均安置有重心调节配重块(126)。
5.根据权利要求4所述的一种海底行走机器人数字孪生系统与姿态控制结构,其特征在于,所述传动齿轮轴(127)的外壁分别与外侧齿轮环(120)的外壁、外侧齿轮环(120)的内壁相适配;
6.根据权利要求1所述的一种海底行走机器人数字孪生系统与姿态控制结构,其特征在于,所述海底行走机器人(1)还包括行走控制器(13)、水下处理器(14)及信息集成与收发器(15),
7.根据权利要求6所述的一种海底行走机器人数字孪生系统与姿态控制结构,其特征在于,所述水下处理器(14)还与地形探测机器人(2)相连,
8.根据权利要求1所述的一种海底行走机器人数字孪生系统与姿态控制结构,其特征在于,在所述地形探测机器人(2)上搭载有地形探测器(21)。
9.根据权利要求1所述的一种海底行走机器人数字孪生系统与姿态控制结构,其特征在于,所述海面支持船(3)包括相互连接的水面处理器(31)、显示器(32)及命令端(33),
10.根据权利要求1所述的一种海底行走机器人数字孪生系统与姿态控制结构,其特征在于,所述的脐带缆系统(4)包括连接海底行走机器人(1)与海面支持船(3)的脐带缆(41)、配重块(42)及浮力块(43),所述的配重块(42)及浮力块(43)分别布置在脐带缆(41)上。
技术总结本发明公开了一种海底行走机器人数字孪生系统与姿态控制结构;属于海上综合发电技术方法领域,主要由海底行走机器人、地形探测机器人、海面支持船及脐带缆系统等设备共同组成。本发明通过构建海底行走机器人数字孪生系统可以对深海行走机器人作业工况、运行姿态进行实时观察与控制,有利于深海行走机器人作业的开展和运行维护;同时,通过重心调节模块的结构设计以及其与姿态传感器的布置设计,能够适应海底的复杂地形和物性,保证海底机器人的稳定行走。技术研发人员:李秀,徐立新,刘亚娇,沈人杰,窦培林,洪智超,韩超帅受保护的技术使用者:江苏科技大学技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/288153.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表