饲料搬运码垛机器人及其使用方法与流程
- 国知局
- 2024-09-05 15:04:18
本发明涉及码垛设备,具体为饲料搬运码垛机器人及其使用方法。
背景技术:
1、饲料在生产完毕后,需要将生产包装好的袋装饲料通过码垛机器人进行码垛堆放,方便对集中堆放的饲料进行运输。
2、现有的饲料搬运码垛机器人不便于移动,在搬移时通常需要人工进行搬移,而码垛机器人较重,搬移过程十分的费时费力;现有饲料搬运码垛机器人一般通过操控两个夹爪将饲料板抓起,在将饲料包抓起过程中容易因夹持力度过大而导致饲料包被刮破的情况;现有饲料搬运码垛机器人在将饲料板夹持输送过程中,容易因饲料板内饲料的松散而导致饲料包滑落的情况,为此,我们提出饲料搬运码垛机器人及其使用方法。
技术实现思路
1、本发明的目的在于提供饲料搬运码垛机器人及其使用方法,以解决上述背景技术中提出的问题。
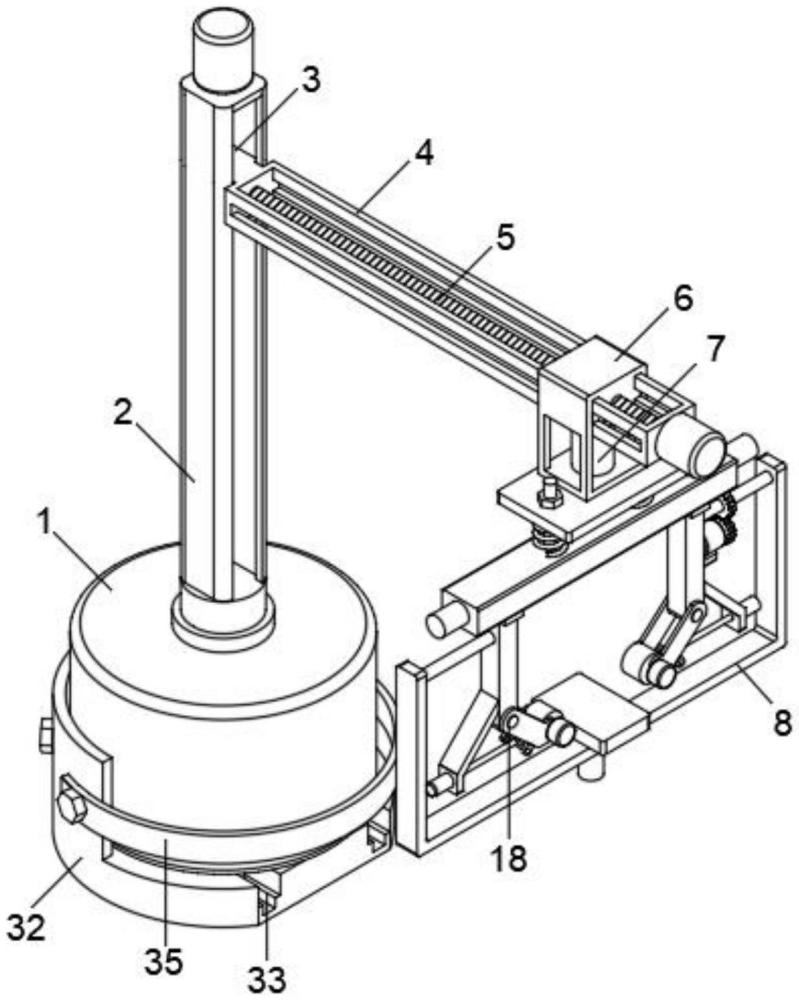
2、为实现上述目的,本发明提供如下技术方案:饲料搬运码垛机器人,包括底座以及安装在底座底部的稳固座,所述底座的顶部连接有立柱,所述立柱的底端固定连接有柱形盘,且柱形盘通过轴承转动连接在底座顶部,所述底座内固定安装有转动电机,且转动电机的输出轴端部穿过底座与立柱固定连接,所述立柱内设置有第一直线模组,且第一直线模组的滑块端部固定连接有横杆,所述横杆内设置有第二直线模组,所述第二直线模组的滑动平台端部固定连接有固定架,所述固定架的底部连接有用于抓取饲料包的抓取机构,所述抓取机构的端部设置有防刮破机构,所述抓取机构的外部设置有用于对抓取的饲料包进行辅助支撑的辅助支撑机构。
3、优选的,所述抓取机构包括支撑杆、调节块、夹持气缸和夹持板,所述支撑杆内对称滑动连接有调节块,所述支撑杆的底部开设有水平方向的滑动槽,所述调节块的端部穿过滑动槽一体连接有夹持板,所述支撑杆的对应两侧壁均安装有夹持气缸,且夹持气缸的活塞杆端部伸入支撑杆内与调节块固定连接,所述支撑杆的顶部对称固定连接有滑杆,所述固定架的底部转动连接有固定板,所述固定架内固定安装有旋转电机,且旋转电机的输出轴端部与固定板固定连接,所述固定板的顶部对称开设有滑孔,两个所述滑杆分别滑动穿过两个滑孔,所述滑杆位于固定板顶部一端的外侧螺纹连接有螺帽,所述滑杆外侧位于支撑杆和固定板之间套设有弹簧,且弹簧的两端分别与支撑杆及固定板固定连接。
4、优选的,所述防刮破机构包括调节杆、安装板、调节气缸、滑座和转动辊,所述夹持板的底端转动连接有调节杆,所述调节杆的端部转动连接有转动辊,所述调节杆端部的一侧固定安装有驱动电机,所述驱动电机的输出轴端部与转动辊的中心轴固定连接,所述夹持板底端固定连接有安装板,且安装板的底端固定安装有调节气缸,所述调节杆位于安装板的一侧滑动连接有滑座,所述调节气缸的活塞杆端部穿过安装板与滑座转动连接。
5、优选的,所述辅助支撑机构包括转轴、u型架、从动齿轮、主动齿轮、伺服电机、升降气缸和支撑板,两个所述夹持板侧壁的顶端均转动连接有转轴,且两个转轴的端部固定连接有u型架。
6、优选的,所述稳固座的顶部对称开设有滚槽,所述底座的底部等距安装有四个滚轮,所述滚轮滚动连接在滚槽内,所述稳固座顶部的一端一体连接有弧形立板,且弧形立板与底座之间通过螺栓固定连接。
7、优选的,所述稳固座顶部的弧形立板之间设置有稳固杆,且稳固杆配合连接在底座的外侧,所述稳固杆的两端分别通过固定螺栓与弧形立板固定连接。
8、优选的,所述u型架一侧内壁的转轴外侧固定连接有从动齿轮,所述夹持板侧壁固定安装有伺服电机,且伺服电机的输出轴端部固定连接有主动齿轮,所述主动齿轮和从动齿轮啮合连接。
9、根据以上任意一项所述的饲料搬运码垛机器人的使用方法,包括如下步骤:
10、步骤一:将稳固座置于选定安装机器人的位置,推动该饲料搬运码垛机器人移动至稳固座处,移动过程中使得底座底部两边的两个滚轮对应移动至滚槽内,底座连接至稳固座的顶部,然后通过固定螺栓将底座和稳固座之间固定,在稳固座顶部的弧形立板两端通过稳固杆连接;
11、步骤二:通过装置设置的控制系统控制转动电机工作能够控制抓取机构的转动,通过第一直线模组能够控制抓取机构的升降,通过第二直线模组能够调节抓取机构在水平方向的位置,通过旋转电机工作能够控制抓取机构的转动,锁定至输送来的饲料包,使抓取机构能够大范围移动;
12、步骤三:抓取时,控制夹持气缸工作,使两个夹持板将饲料包夹持住,配合调节气缸和驱动电机工作,调节气缸工作可控制调节杆的端部置于饲料包底端,驱动电机工作控制转动辊转动,辅助饲料板一定程度的上移,使两个夹持板顺利抓取饲料包,调节杆的端部朝向饲料包底部,使饲料包夹持固定,然后控制伺服电机工作,使u型架的端部转动至饲料包下方,控制升降气缸工作,使支撑板上移,将饲料包的底部进行稳定支撑,再将抓取的饲料包转移至堆放区。
13、与现有技术相比,本发明的有益效果是:
14、1、本发明通过在底座的底部安装滚轮,大大方便了对该饲料搬运码垛机器人的移动,稳固座具备一定的配重,使用时可以将底座直接推至稳固座顶部,然后通过螺栓进行固定,安装方便,保证了饲料搬运码垛机器人的稳固性。
15、2、本发明通过转动电机能控制立柱的转动,使抓取机构能够做周向移动,通过第一直线模组的设置能够控制抓取机构的升降,通过第二直线模组的设置能够调节抓取机构位于水平方向的位置,从而通过设置的控制系统可以使抓取机构准确定位在待抓取的饲料包处,使用更为灵活。
16、3、本发明通过抓取机构能够实现对饲料包的抓取,通过防刮破机构不仅能够帮助饲料包上移至两个夹持板之间,而且能够防止对饲料包的刮伤,提高了饲料搬运码垛的质量。
17、4、本发明通过辅助支撑机构的设置能够在抓取饲料包后,对抓取的饲料包进行移动的支撑,避免了饲料包内部饲料松散导致饲料包掉落的情况。
技术特征:1.饲料搬运码垛机器人,其特征在于,包括底座(1)以及安装在底座(1)底部的稳固座(32),所述底座(1)的顶部连接有立柱(2),所述立柱(2)的底端固定连接有柱形盘,且柱形盘通过轴承转动连接在底座(1)顶部,所述底座(1)内固定安装有转动电机(36),且转动电机(36)的输出轴端部穿过底座(1)与立柱(2)固定连接,所述立柱(2)内设置有第一直线模组(3),且第一直线模组(3)的滑块端部固定连接有横杆(4),所述横杆(4)内设置有第二直线模组(5),所述第二直线模组(5)的滑动平台端部固定连接有固定架(6),所述固定架(6)的底部连接有用于抓取饲料包的抓取机构(7),所述抓取机构(7)的端部设置有防刮破机构(18),所述抓取机构(7)的外部设置有用于对抓取的饲料包进行辅助支撑的辅助支撑机构(8)。
2.根据权利要求1所述的饲料搬运码垛机器人,其特征在于:所述抓取机构(7)包括支撑杆(11)、调节块(14)、夹持气缸(15)和夹持板(17),所述支撑杆(11)内对称滑动连接有调节块(14),所述支撑杆(11)的底部开设有水平方向的滑动槽(16),所述调节块(14)的端部穿过滑动槽(16)一体连接有夹持板(17),所述支撑杆(11)的对应两侧壁均安装有夹持气缸(15),且夹持气缸(15)的活塞杆端部伸入支撑杆(11)内与调节块(14)固定连接,所述支撑杆(11)的顶部对称固定连接有滑杆(12),所述固定架(6)的底部转动连接有固定板(10),所述固定架(6)内固定安装有旋转电机(9),且旋转电机(9)的输出轴端部与固定板(10)固定连接,所述固定板(10)的顶部对称开设有滑孔,两个所述滑杆(12)分别滑动穿过两个滑孔,所述滑杆(12)位于固定板(10)顶部一端的外侧螺纹连接有螺帽,所述滑杆(12)外侧位于支撑杆(11)和固定板(10)之间套设有弹簧(13),且弹簧(13)的两端分别与支撑杆(11)及固定板(10)固定连接。
3.根据权利要求2所述的饲料搬运码垛机器人,其特征在于:所述防刮破机构(18)包括调节杆(24)、安装板(25)、调节气缸(26)、滑座(27)和转动辊(28),所述夹持板(17)的底端转动连接有调节杆(24),所述调节杆(24)的端部转动连接有转动辊(28),所述调节杆(24)端部的一侧固定安装有驱动电机(29),所述驱动电机(29)的输出轴端部与转动辊(28)的中心轴固定连接,所述夹持板(17)底端固定连接有安装板(25),且安装板(25)的底端固定安装有调节气缸(26),所述调节杆(24)位于安装板(25)的一侧滑动连接有滑座(27),所述调节气缸(26)的活塞杆端部穿过安装板(25)与滑座(27)转动连接。
4.根据权利要求2所述的饲料搬运码垛机器人,其特征在于:所述辅助支撑机构(8)包括转轴(19)、u型架(20)、从动齿轮(21)、主动齿轮(22)、伺服电机(23)、升降气缸(30)和支撑板(31),两个所述夹持板(17)侧壁的顶端均转动连接有转轴(19),且两个转轴(19)的端部固定连接有u型架(20)。
5.根据权利要求1所述的饲料搬运码垛机器人,其特征在于:所述稳固座(32)的顶部对称开设有滚槽(33),所述底座(1)的底部等距安装有四个滚轮(34),所述滚轮(34)滚动连接在滚槽(33)内,所述稳固座(32)顶部的一端一体连接有弧形立板,且弧形立板与底座(1)之间通过螺栓固定连接。
6.根据权利要求2所述的饲料搬运码垛机器人,其特征在于:所述稳固座(32)顶部的弧形立板之间设置有稳固杆(35),且稳固杆(35)配合连接在底座(1)的外侧,所述稳固杆(35)的两端分别通过固定螺栓与弧形立板固定连接。
7.根据权利要求4所述的饲料搬运码垛机器人,其特征在于:所述u型架(20)一侧内壁的转轴(19)外侧固定连接有从动齿轮(21),所述夹持板(17)侧壁固定安装有伺服电机(23),且伺服电机(23)的输出轴端部固定连接有主动齿轮(22),所述主动齿轮(22)和从动齿轮(21)啮合连接。
8.根据权利要求1-7任意一项所述的饲料搬运码垛机器人的使用方法,其特征在于,包括如下步骤:
技术总结本发明公开了饲料搬运码垛机器人及其使用方法,包括底座以及安装在底座底部的稳固座,底座的顶部连接有立柱,立柱的底端固定连接有柱形盘,且柱形盘通过轴承转动连接在底座顶部,底座内固定安装有转动电机,且转动电机的输出轴端部穿过底座与立柱固定连接,立柱内设置有第一直线模组,且第一直线模组的滑块端部固定连接有横杆,横杆内设置有第二直线模组,此饲料搬运码垛机器人通过抓取机构能够实现对饲料包的抓取,防刮破机构不仅能够帮助饲料包上移至两个夹持板之间,还能够防止对饲料包的刮伤,辅助支撑机构的设置能够在抓取饲料包后,对抓取的饲料包进行移动的支撑,避免了饲料包内部饲料松散导致饲料包掉落的情况。技术研发人员:伍光护,陈观卫,罗秋球,陈国华受保护的技术使用者:茂名市鼎壹饲料有限公司技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/289373.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表