一种防止野蛮驾驶的智能车机及其控制方法与流程
- 国知局
- 2024-09-14 14:39:43
本发明涉及机动车驾驶安全,尤其涉及一种防止野蛮驾驶的智能车机及其控制方法。
背景技术:
1、随着机动车数量的急剧上升,车辆的事故发生率越来越高,野蛮驾驶的事情常有发生(故意冲撞他人、故意冲撞周围商铺等),其中,驾驶员的不健康驾驶心理是造成野蛮驾驶事故的最初原因,若能够在驾驶的过程中对驾驶员的驾驶方式进行数据的监控以及分析,并进行预判,在做出违背常理的驾驶举动时进行干预,则能够有效地保障各方的生命及财产安全。
2、为此,有必要提出一种防止野蛮驾驶的智能车机及其控制方法来干预驾驶员的野蛮驾驶行为,进而确保车辆安全驾驶。
技术实现思路
1、为了解决上述问题,本发明提出一种防止野蛮驾驶的智能车机及其控制方法来干预驾驶员的野蛮驾驶行为,进而确保车辆安全驾驶。
2、本发明通过以下技术方案实现的:
3、本发明提出一种防止野蛮驾驶的智能车机控制方法,包括以下步骤:
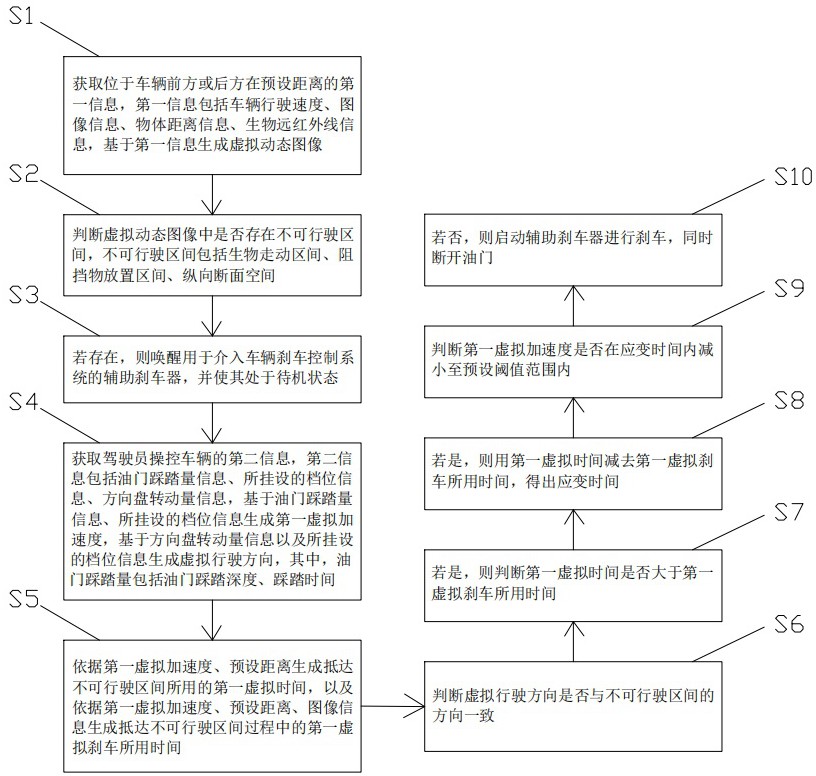
4、获取位于车辆前方或后方在预设距离的第一信息,所述第一信息包括车辆行驶速度、图像信息、物体距离信息、生物远红外线信息,基于所述第一信息生成虚拟动态图像;
5、判断虚拟动态图像中是否存在不可行驶区间,所述不可行驶区间包括生物走动区间、阻挡物放置区间、纵向断面空间;
6、若存在,则唤醒用于介入车辆刹车控制系统的辅助刹车器,并使其处于待机状态;
7、获取驾驶员操控车辆的第二信息,所述第二信息包括油门踩踏量信息、所挂设的档位信息、方向盘转动量信息,基于油门踩踏量信息、所挂设的档位信息生成第一虚拟加速度,基于方向盘转动量信息以及所挂设的档位信息生成虚拟行驶方向,其中,油门踩踏量包括油门踩踏深度、踩踏时间;
8、依据车辆行驶速度、第一虚拟加速度、预设距离生成抵达所述不可行驶区间所用的第一虚拟时间,以及依据第一虚拟加速度、预设距离、图像信息生成抵达不可行驶区间过程中的第一虚拟刹车所用时间;
9、判断虚拟行驶方向是否与不可行驶区间的方向一致;
10、若是,则判断第一虚拟时间是否大于第一虚拟刹车所用时间;
11、若是,则用第一虚拟时间减去第一虚拟刹车所用时间,得出应变时间;
12、判断第一虚拟加速度是否在所述应变时间内减小至预设阈值范围内;
13、若否,则启动辅助刹车器进行刹车,同时断开油门。
14、进一步的,所述基于所述第一信息生成虚拟动态图像的步骤中,包括:
15、应用两个预设高清摄像头对车辆前方或后方的图像进行图像信息的获取;
16、应用两个超声波测距传感器对车辆前方或后方的物体进行物体距离信息以及道路信息的获取;
17、应用远红外传感器对车辆前方或后方的生物远红外线进行生物远红外线信息的获取;
18、判断图像信息中的第一图案是否在车辆行驶过程中无变化;
19、若是,则默认第一图案为道路,然后生成虚拟道路图像;
20、判断图像信息中的第二图案是否在车辆行驶过程中的变化规律相同;
21、若是,则默认第二图案为道路景观,然后生成虚拟道路景观图像;
22、判断图像信息中的第三图案是否随着第一图案的面积减小而增大,且超声波测距传感器并未检测出前方的物体距离信息以及道路深度变化信息;
23、若是,则默认第三图案为纵向断面,然后生成虚拟纵向断面图像;
24、判断物体距离信息中的物体与车辆的距离减小速率是否与车辆行驶速率相等;
25、若是,则默认所述物体为道路中的放置物体,并对固定放置物体的轮廓进行第一颜色标记,然后生成虚拟放置物体;
26、判断远红外线信息中的生物是否是所述物体;
27、若是,则对所述物体的轮廓进行第二颜色标记,然后生成虚拟生物;
28、将虚拟道路图像、虚拟道路景观图像、虚拟纵向断面图像、虚拟放置物体、虚拟生物合成虚拟动态图像。
29、进一步的,所述判断图像信息中的第二图案是否在车辆行驶过程中的变化规律相同的步骤中,包括:
30、获取第二图案、车辆行驶速度;
31、判断第二图案是否以透视效果进行等比放大;
32、若是,则判断放大的速率是否与车辆行驶速度成正比;
33、若是,则默认第二图案在车辆行驶过程中的变化规律相同。
34、进一步的,所述判断物体距离信息中的物体与车辆的距离减小速率是否与车辆行驶速率相等的步骤中,包括:
35、若否,则判断物体与车辆的距离减小速率是否大于车辆行驶速率;
36、若是,则默认物体为道路中的相向运动物体,并对相向运动物体的轮廓进行第三颜色标记,然后生成第一虚拟放置物体;
37、若否,则默认物体为道路中的同向运动物体,并对同向运动物体的轮廓进行第四颜色标记,然后生成第二虚拟放置物体。
38、进一步的,所述判断虚拟动态图像中是否存在不可行驶区间的步骤中,包括:
39、获取虚拟动态图像中位于车辆行驶方向的第一图像;
40、判断第一图像是否为虚拟生物;
41、判断第一图像是否为虚拟放置物体;
42、判断第一图像是否为虚拟纵向断面图像;
43、若上述三者其中一个是,或三者其中两个是,或三者皆是,则标记第一图像为不可行驶区间。
44、进一步的,所述判断虚拟动态图像中是否存在不可行驶区间的步骤中,还包括:
45、获取虚拟动态图像中位于车辆行驶方向的第二图像,第二图像位于第一图像的一侧;
46、判断第二图像是否为虚拟生物;
47、判断第二图像是否为虚拟放置物体;
48、判断第二图像是否为虚拟纵向断面图像;
49、若上述三者皆否,则标记第二图像为安全行驶区间;
50、判断第二图像是否位于第一图像的左侧;
51、若是,则并播放第一预录制提示语音;
52、若否,则并播放第二预录制提示语音。
53、进一步的,所述基于油门踩踏量信息、所挂设的档位信息生成第一虚拟加速度的步骤中,包括:
54、获取踩踏深度、踩踏时间,并进行记录;
55、调用预储存的油门踩踏深度和所挂设的档位信息结合后所对应的理论加速度;
56、将理论加速度与踩踏时间进行对应结合,形成多组理论加速度以及对应的踩踏时间,并对多组理论加速度进行从高到低的排位;
57、定义排位的前30%为最大阈值区间;
58、获取最大阈值区间内的多组理论加速度以及对应的踩踏时间之和,然后筛选出最大阈值区间内的多组理论加速度的最大值,并将最大值定义为第一理论加速度,将对应的踩踏时间之和定义为第一理论加速度所对应的第一踩踏时间;
59、获取最大阈值区间内的多组理论加速度以及对应的踩踏时间之和,然后计算最大阈值区间内的多组理论加速度的平均值,并将平均值定义为第二理论加速度,将对应的踩踏时间之和定义为第二理论加速度所对应的第二踩踏时间;
60、判断第一踩踏时间是否大于剩余踩踏时间之和的三分之二;
61、若是,则默认第一理论加速度为第一虚拟加速度;
62、若否,则默认第二理论加速度为第一虚拟加速度。
63、进一步的,所述基于方向盘转动量信息以及所挂设的档位信息生成虚拟行驶方向的步骤中,包括:
64、获取方向盘转动的角度;
65、获取所挂设的档位信息;
66、调用预存储的方向盘转动的角度所对应的轮胎转动角度信息;
67、根据所挂设的档位信息以及轮胎转动角度信息生成虚拟行驶方向。
68、进一步的,所述依据车辆行驶速度、第一虚拟加速度、预设距离生成抵达所述不可行驶区间所用的第一虚拟时间,以及依据第一虚拟加速度、预设距离、图像信息生成抵达不可行驶区间过程中的第一虚拟刹车所用时间的步骤中,包括:
69、获取车辆行驶速度、第一虚拟加速度、预设距离;
70、依据预设距离、车辆行驶速度、第一虚拟加速度的关系,计算出第一虚拟时间;
71、依据第一虚拟加速度以及第一虚拟时间,计算出车辆的虚拟行驶速率;
72、调用预储存的车辆行驶速率所对应的刹车所用时间;
73、将刹车所用时间对第一虚拟刹车所用时间进行赋值。
74、一种防止野蛮驾驶的智能车机,根据上述所述的防止野蛮驾驶的智能车机控制方法,包括车辆本体,还包括:
75、第一获取模块,用于获取位于车辆前方或后方在预设距离的第一信息,基于所述第一信息生成虚拟动态图像;
76、第一判断模块,用于判断虚拟动态图像中是否存在不可行驶区间;
77、第一执行模块,用于若存在,则唤醒用于介入车辆刹车控制系统的辅助刹车器,并使其处于待机状态;
78、第二获取模块,用于获取驾驶员操控车辆的第二信息,所述第二信息包括油门踩踏量信息、所挂设的档位信息、方向盘转动量信息,基于油门踩踏量信息、所挂设的档位信息生成第一虚拟加速度,基于方向盘转动量信息以及所挂设的档位信息生成虚拟行驶方向;
79、运算模块,用于依据第一虚拟加速度、预设距离生成抵达所述不可行驶区间所用的第一虚拟时间,以及抵达所述不可行驶区间过程中的第一虚拟刹车所用时间;
80、第二判断模块,用于判断虚拟行驶方向是否与不可行驶区间的方向一致;
81、第三判断模块,用于判断第一虚拟时间是否大于第一虚拟刹车所用时间;
82、第二执行模块,用于若是,则用第一虚拟时间减去第一虚拟刹车所用时间,得出应变时间;
83、第四判断模块,用于判断第一虚拟加速度是否在所述应变时间内减小至预设阈值范围内;
84、第三执行模块,用于若否,则启动辅助刹车器进行刹车,同时断开油门。
85、本发明的有益效果:
86、本发明通过获取位于车辆前方或后方在预设距离的第一信息生成虚拟动态图像,然后根据虚拟动态图像判断出不可行驶区间,通过辅助刹车器对车辆刹车控制系统进行介入,然后获取驾驶员操控车辆的第二信息,通过第二信息生成第一虚拟加速度以及虚拟行驶方向,依据第一虚拟加速度、预设距离生成第一虚拟时间、第一虚拟刹车所用时间,在虚拟行驶方向与不可行驶区间的方向一致且第一虚拟时间大于第一虚拟刹车所用时间时,则计算出应变时间,若第一虚拟加速度未在应变时间内减小至预设阈值范围时,则启动辅助刹车器进行刹车,同时断开油门,这样则能够对驾驶员的驾驶行为进行预判和干预,防止驾驶员出现野蛮驾驶行为,进而确保车辆安全驾驶。
本文地址:https://www.jishuxx.com/zhuanli/20240914/295374.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表