一种用于种子银行的自动存取种子篮机器人及其操作方法与流程
- 国知局
- 2024-09-14 15:15:21
本发明涉及自动化和人工智能,具体为一种用于种子银行的自动存取种子篮机器人及其操作方法。
背景技术:
1、种子资源关乎人类社会的可持续发展。然而,随着人口的增加、气候变化的影响以及人类活动的扰乱,全球范围内不少植物物种已经灭绝或者正面临着灭绝的危险,因此种子资源的保护和保存变得至关重要。种子银行是一种集中存储和管理各种类型种子资源的系统。建设种子银行对于保护物种多样性、维护生态平衡、保障农业食品安全以及促进科学研究和教育发展具有重要的现实意义。
2、对于大多数正常型种子而言,高温高湿环境会促进种子的代谢活动,加速其发芽过程,但同时也会导致种子霉变等问题。实际上,种子的保存更适合干燥低温的存储环境。大量实践数据表明,种子的含水量每降低1%或存储温度每降低5°c,种子的储存寿命可延长一倍。因此,种子银行需要建设在精确控温、低温低湿的环境中。
3、目前,依靠传统的人工负责种子库的出入库操作,存在诸多缺点;第一,人工处理种子出入库工作效率低下,需要花费大量的时间和人力资源;第二,人工处理种子出入库数据准确性差,容易导致错误发生;第三,人工处理种子出入库,由于缺乏有效的监控和安全措施,种子容易丢失、浪费或被盗窃;第四,传统人工操作种子库往往缺乏有效的跟踪和管理系统,使得难以准确记录和掌握种子的流动情况;第五,人工处理种子出入库成本高,增加了管理成本和人力投入。此外,处理出入库时人员进入种子银行,需要打开种子银行的门几分钟甚至几小时,这会扰动恒定的温湿度等储存环境因子,给种子的安全保存带来较大的威胁。
4、一言以蔽之,传统人工操作种子库出入库存在诸多缺点,包括工作效率低下、数据准确性差、容易丢失和盗窃、不便于跟踪和管理,以及难以实现自动化和数字化等。
技术实现思路
1、针对种子银行中人工处理存在的问题,本发明的目的在于:提供一种用于种子银行的自动存取种子篮机器人及其操作方法,以实现种子出入库的全程自动化处理,其具有结构简单、操作便捷和适用广泛等特点。
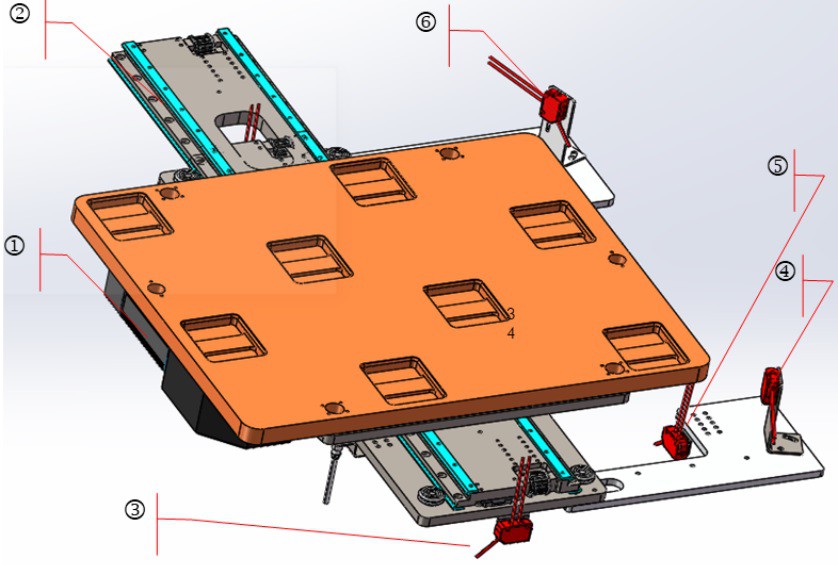
2、为实现上述目的,本发明所采取的技术方案是:提供一种用于种子银行的自动存取种子篮机器人及其操作方法;所述用于种子银行的自动存取种子篮机器人采用薄型双伸位结构,包括库位检测传感器、种子篮检测传感器、托盘检测传感器、滑动机构、旋转驱动电机以及相应电机的控制单元plc模块;其中,库位检测传感器、种子篮检测传感器、托盘检测传感器及电机控制单元plc模块以无线连接方式连接控制终端上位机。
3、所述自动存取种子篮机器人从控制终端上位机处接收指令,在本体控制单元的控制下完成具体指令;控制终端上位机根据种子银行的物理空间布局使用图形遍历算法动态规划自动存取种子篮机器人的行动路线,具体使用的路径规划算法是优化的dijkstra图形遍历算法。
4、所述旋转驱动电机控制单元plc以无线连接方式连接控制终端,完成控制单元plc发出的移动和定位指令;通过向旋转驱动电机发送脉冲频率、脉冲数量、加减速时间等,旋转驱动电机控制器操作旋转驱动电机,带动自动存取种子篮机器人沿着地面轨道移动。
5、所述旋转驱动电机控制单元plc以无线连接方式连接控制终端上位机,接收种子篮存取请求后,控制终端上位机根据种子银行空间布局的特点计算出自动存取种子篮机器人的行动路径,并分发给旋转驱动电机控制单元plc;旋转驱动电机控制单元plc接收到指令后,驱动电机工作,从而让自动存取种子篮机器人的滑动机构在地面轨道上滑动;滑动过程中,自动存取种子篮机器人分别使用库位检测传感器、种子篮检测传感器来定位目标种子保藏架和种子篮;在整个存取过程中,旋转驱动电机能够根据的规划行动路线自主定位、自主移动和自动升降。
6、所述库位检测传感器,用来定位种子保藏架;其标识信息选用rfid识别器或二维码;种子银行中每个种子保藏架都自动分配一个唯一的标识信息,写入种子保藏架的编号、位置和隔层等信息;自动存取种子篮机器人在沿着地面轨道移动的过程中,会动态识别种子保藏架上的rfid电子标签或者二维码;当所识别种子保藏架的rfid电子标签与目标保藏架的rfid电子标签信息一致,则自动存取种子篮机器人开始着手下一阶段种子篮的存取。
7、所述托盘检测传感器,用来定位种子篮身份标签信息;每个种子篮均匀划分成n个子位置,如36个,每个位置上放上1个种子瓶;本发明许可用户根据种子瓶和种子篮的大小自动调整种子篮的空间布局以及存放种子瓶的存放排列形式;种子瓶中存放种子资源,每个种子篮都会配有身份标签信息,每个种子瓶的瓶盖和瓶底分别亦配有身份标签信息。
8、所述托盘检测传感器是自动存取种子篮机器人用来定位存放种子篮的托盘的rfid和二维码识别器;当要对目标种子篮进行存取时,自动存取种子篮机器人将使用托盘检测传感器检测托盘的空载情况;当托盘上没有负载时,自动存取种子篮机器人将向控制终端上位机发出报警信息。
9、自动存取种子篮机器人使用托盘检测器检测种子篮的身份标签信息是不是与目标种子篮一致。
10、当托盘检测器检测种子篮与目标种子篮的身份标签信息一致;在存放过程中,自动存取种子篮机器人定位到目标种子保藏架和目标种子篮的位置时,自动存取种子篮机器人使用图像识别算法识别出目标种子篮所在保藏架隔层位置上的空缺位置,确定可存放的同层位置后,自动存取种子篮机器人抓手将种子篮从托盘上取出并摆放到位;在取出过程中,自动存取种子篮机器人获得将要取出的种子篮信息,使用托盘检测传感器确认托盘空载时,将自动定位并且导航至目标种子篮所在的位置;所述空载是托盘检测传感器检测时未发现种子篮的状态。
11、自动存取种子篮机器人首先使用rfid或二维码读取器读取种子篮的信息并定位,由于高频rfid在定位种子篮时存在一定的误差,自动存取种子篮机器人会使用种子瓶视觉检测传感器识别对种子篮中的n个种子瓶进行图像识别,确保种子篮内的种子瓶是目标种子瓶;如不是,自动存取种子篮机器人会在目标种子篮所在隔层进行识别;如未找到,自动存取种子篮机器人会给控制单元plc返回目标查找不到的信息;如找到,自动存取种子篮机器人则使用抓手将目标种子篮取出,并且放到托盘上;然后,自动存取种子篮机器人返回至种子瓶分拣处,将种子篮卸载至种子瓶分拣平台的运输轨道上,并结束任务。
12、所述图像识别算法,是种子银行自动存取种子篮机器人控制器的上位机依据图像识别算法,具体采用faster rcnn和yolo算法对种子篮或种子瓶所在位置进行目标检测和识别;具体使用过程如下:当存放种子篮时,自动存取种子篮机器人不仅会对种子篮定位识别,同时也会使用图像识别的方法去除rfid定位偶尔不准的负面影响;自动存取种子篮机器人对种子篮所在位置进行拍照,通过控制单元plc传送给上位机,由后者进行种子篮位置识别。当取出种子篮时,自动存取种子篮机器人对种子篮内的n个种子瓶进行拍照,同样经控制单元plc传送给上位机,由后者识别种子篮是不是目标种子篮。
13、本发明的有益效果:所述旋转驱动电机控制单元plc以无线连接方式连接控制终端,完成控制单元plc发出的移动和定位指令;通过向旋转驱动电机发送脉冲频率、脉冲数量、加减速时间等,旋转驱动电机控制器操作旋转驱动电机,带动存取机器人沿着地面轨道移动,实现了种子的自动化流水线式出入库;本技术全程无人化操作,大大提高了种子资源库的存取效率,也有效保证了种子资源库的保存质量。
本文地址:https://www.jishuxx.com/zhuanli/20240914/297543.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表