一种离子探针样品树脂靶自动注胶及磨抛设备及工作方法与流程
- 国知局
- 2024-09-19 14:23:08
本发明涉及离子探针样品树脂靶制备,具体涉及一种离子探针样品树脂靶自动注胶及磨抛设备及工作方法。
背景技术:
1、离子探针(简称sims)具有高质量分辨率、高灵敏度和高分析精度的优点,其分析束斑小(一般小于20微米),样品消耗量低(一般定义为无损分析)。离子探针分析技术主要包括样品制备和仪器测试分析两个重要环节,制备合适的样品靶是开展分析测试和获得可靠数据的重要基础。目前,离子探针样品靶通常是直径为1英寸、0 .5英寸和10毫米的圆柱形环氧树脂靶。通常样品靶的打磨和抛光以抛磨至样品表面出露90%以上为准。有利于样品进行多次抛光和测试的要求。目前全国的离子探针样品靶制备样品颗粒注模和抛光步骤都是分开的,且都是手工或半手工操作,导致制靶质量不稳定,影响后续测试工作。整体工作效率偏低。为解决上述问题,我们特发明树脂靶自动注胶及磨抛设备,并具有可对靶上每个颗粒样品进行单独精细打磨抛光的功能,可实现一些特殊测试要求的抛光,比如包裹体测试。专利zl202010455397.9做了可预留标样位置的样品靶,这样通过更换样品靶而原标样靶可以一同放入仪器样品仓进行测试,使珍贵的标样得到充分多次利用。专利zl202111585756.3结合微米ct对样品颗粒内部结构的三维可视化分析,确定了目标分析对象所在层位,便于微小样品指定层位的样品靶制备。它每次只能对单个颗粒样品进行制靶,效率偏低。上述两个专利都没有解决样品靶制备的注胶和打磨及抛光两步走效率偏低的问题。
2、 因为对于微细颗粒样品而言,一方面低的样品/ 环氧树脂体积比增加了无谓的实验本底,影响分析测试过程中的真空度,从而影响了样品的水含量和稳定同位素测试;另一方面,当多个样品颗粒制备于同一样品靶上时,不便于对每个样品颗粒的指定层位进行抛磨进而影响到离子探针分析。因此,需要设计一种离子探针样品树脂靶自动注胶及磨抛设备及工作方法,以解决现有树脂样品靶制备不能实现自动化、并且有指定层位的样品靶均是采用单个样品靶制备效率低的问题。
技术实现思路
1、针对现有技术中存在的问题,本发明的目的在于提供一种离子探针样品树脂靶自动注胶及磨抛设备及工作方法。
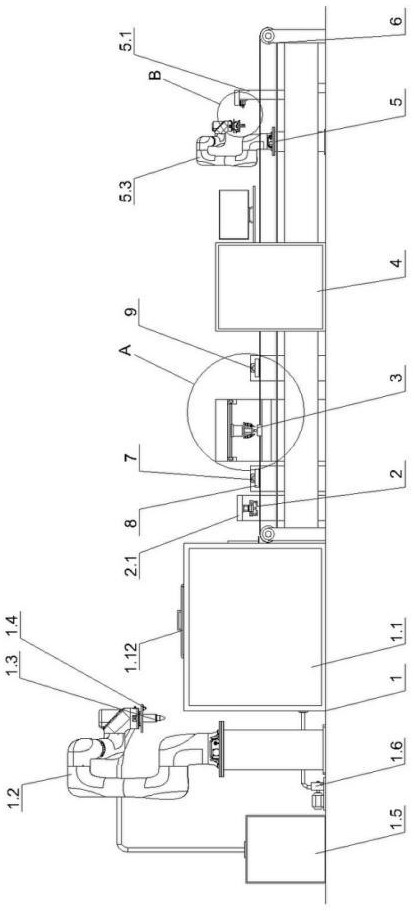
2、本发明解决其技术问题所采用的技术方案是:一种离子探针样品树脂靶自动注胶及磨抛设备,包括真空注胶机构、样品靶取出机构、普通磨机构和精细磨机构,所述样品靶取出机构、普通磨机构和精细磨机构均安装在输送皮带机一侧,真空注胶机构设置在输送皮带机的进料端,真空注胶机构设有注胶真空箱、注胶机器人、树脂储存箱和真空泵,注胶真空箱内放置样品座和空心柱,注胶机器人的执行端安装注胶机头,注胶机头伸入注胶真空箱向已用双面胶粘固定待测的天然矿物样品在样品座上的空心柱内注胶;
3、样品靶取出机构设有取出机架和样品靶吸盘,取出机架上安装取出气缸,取出气缸的下部安装样品靶吸盘,取出气缸控制样品靶吸盘升降从空心柱中取出样品靶;
4、样品靶取出机构后部设置普通磨机构,普通磨机构设有普通磨机架和普通打磨头,普通打磨头对样品靶固定天然矿物样品的平面进行打磨抛光;
5、普通磨机构后部设置微米ct机,微米ct机后部安装精细磨机构,精细磨机构设有精细磨机架和精细磨机器人,精细磨机架上安装精细打磨头,精细磨机器人的执行端安装样品靶夹爪,样品靶夹爪夹持样品靶配合精细打磨头进行双面打磨抛光。
6、具体的是,所述注胶机器人通过机器人底座安装在工作台上,注胶机器人执行端的安装板上安装注胶机头,注胶机头通过管道连接树脂储存箱,树脂储存箱放置在工作台上,注胶机头的动力部件将刚配好的树脂抽出滴入空心柱内,注胶机器人执行端的安装板上还安装相机,相机识别空心柱的位置。
7、具体的是,所述注胶真空箱采用透明材质,注胶真空箱上部设有注胶机头入口,注胶机头入口供注胶机头伸入,注胶真空箱的一侧设有出样口,注胶真空箱的另一侧设有抽真空口,抽真空口通过管道连接真空泵,真空泵安装在工作台上,真空泵将注胶真空箱内抽真空。
8、具体的是,所述注胶机头入口处外侧安装外层盖,外层盖通过合页铰接在注胶真空箱的外壁上,注胶机头入口的内侧设有内层密封盖,内层密封盖安装在内层连扳上,内层连扳连接内层电机的电机轴,内层电机驱动内层连扳和内层密封盖转动,内层电机上部安装在内层伸缩缸的缸杆上,内层伸缩缸的底座安装在注胶真空箱的内壁上,内层伸缩缸控制内层密封盖升降并在上升时封堵注胶机头入口;
9、出样口的内层设有出样口密封盖,出样口密封盖安装在出样连扳上,出样连扳连接出样电机的电机轴,出样电机驱动出样连扳和出样口密封盖转动,出样电机的后部安装在出样伸缩缸的缸杆上,出样伸缩缸的底座安装在注胶真空箱的内壁上,出样伸缩缸控制出样口密封盖左右移动并在向右移动时封堵出样口。
10、具体的是,所述注胶真空箱内侧中部设有注胶工作台,注胶工作台上放置样品盘,样品盘靠近出样口一侧设有开口,样品盘上放置多个样品座,样品座中部通过双面胶粘住空心柱,空心柱内的双面胶上放入待测天然矿物样品颗粒;
11、注胶工作台上安装出样气缸,出样气缸的缸杆端部安装出样推板,出样推板的宽度与样品座相适配,出样口的宽度大于样品座的宽度,出样气缸控制出样推板将单个样品座逐一推出出样口,样品盘的两侧均安装推料气缸,推料气缸的缸杆端部安装推料推板,推料气缸控制推料推板将边部的样品座推到样品盘中部出样推板位置。
12、具体的是,所述输送皮带机的进料端位于出样口的外侧下方,输送皮带机的一侧安装取出机架,取出机架安装在工作台上,取出机架的上部安装取出气缸,取出气缸的缸杆上安装手指气缸一,手指气缸一的两个输出端均安装空心柱夹爪,空心柱夹爪相对设置,空心柱夹爪中部设置弧形凹槽,手指气缸一控制空心柱夹爪抓住空心柱,手指气缸一底部安装样品靶吸盘,样品靶吸盘将空心柱中的样品靶吸出再放到输送皮带机上。
13、具体的是,所述取出机架后部且在输送皮带机的一侧安装样品座下料气缸,样品座下料气缸安装在支架一上,支架一安装在工作台上,样品座下料气缸的缸杆朝向输送皮带机一侧,样品座下料气缸的缸杆上安装样品座推板,样品座下料气缸控制样品座推板将样品座从输送皮带机上推下;
14、普通磨机架后部且在输送皮带机的一侧安装样品靶下料气缸,样品靶下料气缸安装在支架二上,支架二安装在工作台上,样品靶下料气缸的缸杆朝向输送皮带机一侧,样品靶下料气缸的缸杆上安装样品靶推板,样品靶下料气缸控制样品靶推板将粗磨后的样品靶从输送皮带机上推下。
15、具体的是,所述普通磨机架安装在工作台上,普通磨机架两侧安装纵向导轨,纵向导轨上滑动连接纵向滑块,两个纵向滑块之间连接纵向移动梁,纵向导轨一端安装纵向电机,纵向电机的电机轴连接纵向丝杠,纵向丝杠上丝接纵向丝母座,纵向丝母座安装在纵向滑块上,纵向电机驱动纵向移动梁沿纵向导轨移动,纵向移动梁上设有横向导轨,横向导轨上滑动连接横向滑块,横向导轨一端安装横向电机,横向电机的电机轴连接横向丝杠,横向丝杠上丝接横向丝母座,横向丝母座安装在横向滑块上,横向电机驱动横向滑块沿横向导轨移动,横向滑块上安装普通磨气缸,普通磨气缸的缸杆上设置安装板,安装板上安装普通磨电机和喷水头一,喷水头一对普通打磨头喷水降温,普通磨电机的电机轴上安装普通打磨头,普通磨气缸控制普通打磨头升降接触样品靶;
16、普通磨机架上相对安装夹紧气缸,两个夹紧气缸的缸杆上均安装夹紧板,夹紧板相对设置,夹紧板位于输送皮带机上方,夹紧气缸控制夹紧板相对运动夹紧样品靶。
17、具体的是,所述精细磨机器人通过机器人底座安装在工作台上,精细磨机器人的执行端安装手指气缸二,手指气缸二的两个输出端均安装样品靶夹爪,样品靶夹爪的前部设有凹槽,精细磨机器人和手指气缸二共同控制样品靶夹爪夹住输送皮带机上的样品靶;
18、精细磨机架安装在工作台上,精细磨机架上部安装精细磨电机,精细磨电机的输出轴上安装精细打磨头,精细磨机架上还安装喷水头二,喷水头二对精细打磨头喷水降温,精细打磨头对精细磨机器人送来的样品靶进行再次打磨抛光。
19、一种离子探针样品树脂靶自动注胶及磨抛设备的工作方法,包括以下步骤:
20、s1、样品座上粘贴双面胶,在空心柱内表面涂抹凡士林油,空心柱垂直放置在已粘了天然矿物样品颗粒的双面胶表面,使天然矿物样品颗粒位于空心柱中心并压实,样品座按固定点位摆放在样品盘内;
21、s2、制备环氧树脂,将固化剂和树脂按照体积比例0.66:5放置到容器中,通过搅拌棒进行搅拌,搅拌好的环氧树脂倒入到树脂储存箱中,在短时间内进行注胶用;
22、s3、注胶机器人根据相机采集的影像逐个向空心柱中注入树脂,控制样品靶厚度为5-6mm,注胶完成后,内层电机控制内层密封盖旋转至注胶机头入口,内层伸缩缸收缩控制内层密封盖进入封堵住注胶机头入口,盖上外层盖,同理,出样口密封盖封堵住出样口,真空泵开启对注胶真空箱进行抽真空作业,抽真空90分钟,关闭真空泵后,将样品靶静置,等待凝固,根据实验室的外部环境温度,在注胶真空箱内放入电热片,50℃恒温控制样品靶的凝固时间;
23、s4、样品靶凝固后,打开出样口密封盖,输送皮带机开始工作,出样气缸缓慢动作逐个将样品座从出样口推送到输送皮带机上,出样气缸推完中部的,两侧的推料气缸逐个将两侧的样品座推送至样品盘中部;
24、s5、样品座位于取出气缸下方时,取出气缸下降,手指气缸一控制空心柱夹爪夹住空心柱,样品靶吸盘吸出样品靶,空心柱夹爪松开空心柱,输送皮带机继续运行,样品座移动至样品座下料气缸位置,样品座下料气缸控制样品座推板将样品座推下回收,样品靶吸盘松开样品靶放置到输送皮带机上;
25、s6、样品靶移动到普通打磨头下方,输送皮带机停止,两侧的夹紧气缸控制夹紧板夹住样品靶,纵向电机、横向电机和普通磨气缸配合控制普通打磨头移动和升降,普通打磨头对样品靶上部进行打磨抛光;
26、s7、样品靶没有特殊分析目标时,样品靶通过后部的样品靶下料气缸将样品靶从输送皮带机上推下下料,样品靶有特殊分析目标时,样品靶进入微米ct机对颗粒内部结构和形态进行三维可视化分析,然后测定分析目标距表面的深度,样品靶进行后面的精细磨提供数据;
27、s8、样品靶进入精细磨机器人下方,精细磨机器人配合手指气缸二控制样品靶夹爪从侧面夹住样品靶,将样品靶运输至精细打磨头处,通过电脑将步骤s7获得的数据传送给精细磨机器人,精细打磨头对样品靶进行双面的精细剖光打磨,直至到达分析目标位置,打磨效果通过精细磨机器人配备的岩相照相机实时传送到电脑的放大后的图像进行观察,及时调整打磨参数,最后精细磨机器人配合手指气缸二控制样品靶夹爪松开样品靶放置到输送皮带机上输送下料。
28、本发明具有以下有益效果:
29、本发明设计的离子探针样品树脂靶自动注胶及磨抛设备及工作方法,采用样品靶的注胶-分离-普通磨-微米ct-精细磨-下料的自动化处理过程,减少人工参与,流水线式作业,制靶效率提升,降低实验成本。
30、本发明设计的离子探针样品树脂靶自动注胶及磨抛设备及工作方法,样品盘上摆放多个样品座,需要长时间等待干燥的步骤中采用集体注树脂和等待冷却,减少制靶时间,提高制靶效率。
本文地址:https://www.jishuxx.com/zhuanli/20240919/297748.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表