智能弧焊装置的制作方法
- 国知局
- 2024-09-19 14:40:11
本申请涉及焊接,特别是涉及一种智能弧焊装置。
背景技术:
1、在智能焊接技术领域,常通过智能弧焊装置替代人工进行焊接。智能弧焊装置包括相连接的机器人和焊接设备,焊接装备包括焊接电源和焊枪(钳),机器人能够连接于焊枪,以带动焊枪实现焊接。但是,在焊枪进行焊接工作时,连接于焊枪的管线会随着机器人的机械臂的上下左右移动而摆动,管线的摆动不仅影响了机器人的焊接成果,而且管线还容易缠绕在一起,需要人工拆解,影响了焊接效率。
技术实现思路
1、基于此,有必要针对线缆平衡性的问题,提供一种智能弧焊装置。
2、一种智能弧焊装置,所述智能弧焊装置包括:
3、机器人,包括机械臂;
4、车体,所述机器人安装在所述车体的上端面上,所述车体上设置有车轮和脚杯,所述车轮和所述脚杯能够分别与支撑面接触,以使所述车体在移动状态和静止状态切换;
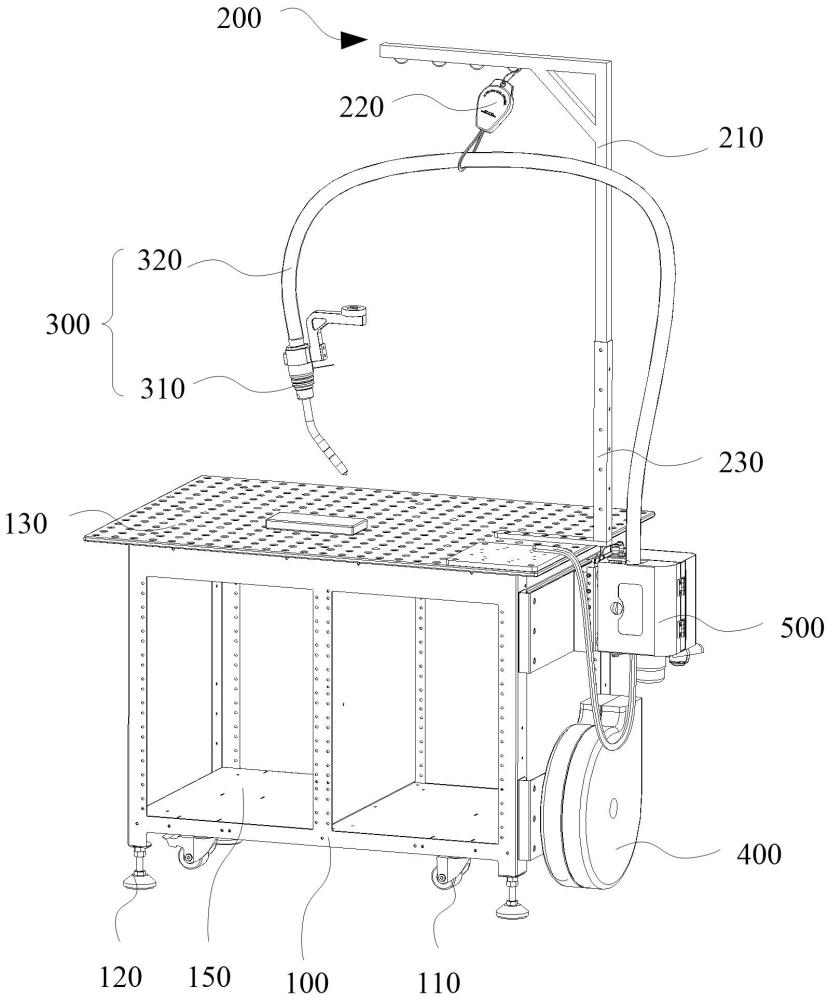
5、平衡组件,包括相连接的安装架和平衡器,所述安装架连接于所述车体;
6、焊枪,包括相连接的焊接部和线缆部,所述焊接部连接于所述机械臂,所述线缆部穿设于所述平衡器的挂设部;
7、送丝机,安装在所述车体上,所述线缆部背离所述焊接部的一端与所述送丝机的出线端连接。
8、在其中一个实施例中,所述安装架与所述车体滑动配合,以调节所述平衡器和所述车体的上端面之间的距离。
9、在其中一个实施例中,所述平衡组件还包括锁紧件和调节座,所述调节座连接于所述车体的上端面,所述安装架背离所述平衡器的一端伸入至所述调节座内,且所述调节座通过所述锁紧件连接于所述安装架。
10、在其中一个实施例中,所述调节座上设置多个第一安装孔,所述安装架上对应多个所述第一安装孔设置有多个第二安装孔,所述锁紧件能够穿设于对应的第一安装孔和第二安装孔,以锁紧所述调节座和所述安装架。
11、在其中一个实施例中,所述安装架包括:
12、第一杆,安装有所述平衡器;
13、第二杆,垂直连接于所述第一杆,所述第二杆背离所述第一杆的一端伸入至所述调节座内,且连接于所述调节座;
14、第三杆,连接于所述第一杆和所述第二杆。
15、在其中一个实施例中,所述第一杆上设置有多个挂钩,多个所述挂钩沿所述第一杆的长度方向延伸,所述平衡器可选择性地悬挂于任一所述挂钩。
16、在其中一个实施例中,还包括安装在所述车体上的丝盘,所述丝盘和所述送丝机的进线端连接。
17、在其中一个实施例中,所述车体还包括推手,所述推手安装于所述车体沿其长度方向的一侧,所述平衡组件、所述丝盘以及所述送丝机安装于所述车体沿其长度方向的另一侧。
18、在其中一个实施例中,所述车体的上端面上设置有安装台板,所述安装台板上设置有阵列排布的螺纹孔,所述机器人通过紧固件可选择性地连接于至少一个所述螺纹孔。
19、在其中一个实施例中,所述车体还具有容纳物品的容纳空间。
20、上述智能弧焊装置,在车体上安装有车轮和脚杯,车轮和脚杯能够分别与支撑面接触,当车轮与支撑面接触时,车轮在支撑面转动,从而带动车体移动。将车轮切换为脚杯,脚杯抵与支撑面接触,从而限制了车体的移动。而将机器人安装在车体的上端面,车体和机器人移动至待焊接位置。在车体上安装有平衡组件,将焊枪的线缆部一端与焊接部连接,另一端与车体上安装在送丝机连接,且线缆部穿过平衡组件的平衡器的挂设部,从而利用平衡器调节线缆部的平衡,不仅减少了线缆部的移动对机器人的焊接成果造成的影响,而且防止线缆部缠绕在一起,提高了焊接效率。本申请提供的智能弧焊装置,当需要进行焊接工作时,将机器人安装在车体的上端面上,焊枪的线缆部穿过平衡器的挂设部,且焊枪的焊接部与机器人的机械臂连接。车轮转动从而带动车体和机器人移动至待焊接位置,此时车体处于移动状态,将车轮切换为脚杯,使脚杯与支撑面接触,从而使车体从移动状态切换为静止状态,当处于静置状态时,平衡器调节线缆部的平衡后,机器人再操作焊枪进行焊接。平衡组件和车体相互配合,只有在车体处于静置状态时,机器人的底座和车体不会发生移动,此时通过平衡器调节线缆部的平衡,才能防止车体的移动而影响线缆部的平衡性能。
技术特征:1.一种智能弧焊装置,其特征在于,所述智能弧焊装置包括:
2.根据权利要求1所述的智能弧焊装置,其特征在于,所述安装架(210)与所述车体(100)滑动配合,以调节所述平衡器(220)和所述车体(100)的上端面之间的距离。
3.根据权利要求2所述的智能弧焊装置,其特征在于,所述平衡组件(200)还包括锁紧件和调节座(230),所述调节座(230)连接于所述车体(100)的上端面,所述安装架(210)背离所述平衡器(220)的一端伸入至所述调节座(230)内,且所述调节座(230)通过所述锁紧件连接于所述安装架(210)。
4.根据权利要求3所述的智能弧焊装置,其特征在于,所述调节座(230)上设置多个第一安装孔,所述安装架(210)上对应多个所述第一安装孔设置有多个第二安装孔,所述锁紧件能够穿设于对应的第一安装孔和第二安装孔,以锁紧所述调节座(230)和所述安装架(210)。
5.根据权利要求3所述的智能弧焊装置,其特征在于,所述安装架(210)包括:
6.根据权利要求5所述的智能弧焊装置,其特征在于,所述第一杆(211)上设置有多个挂钩(214),多个所述挂钩(214)沿所述第一杆(211)的长度方向延伸,所述平衡器(220)可选择性地悬挂于任一所述挂钩(214)。
7.根据权利要求1所述的智能弧焊装置,其特征在于,还包括安装在所述车体(100)上的丝盘(400),所述丝盘(400)和所述送丝机(500)的进线端连接。
8.根据权利要求7所述的智能弧焊装置,其特征在于,所述车体(100)还包括推手(140),所述推手(140)安装于所述车体(100)沿其长度方向的一侧,所述平衡组件(200)、所述丝盘(400)以及所述送丝机(500)安装于所述车体(100)沿其长度方向的另一侧。
9.根据权利要求1所述的智能弧焊装置,其特征在于,所述车体(100)的上端面上设置有安装台板(130),所述安装台板(130)上设置有阵列排布的螺纹孔,所述机器人通过紧固件可选择性地连接于至少一个所述螺纹孔。
10.根据权利要求1所述的智能弧焊装置,其特征在于,所述车体(100)还具有容纳物品的容纳空间(150)。
技术总结本申请涉及一种智能弧焊装置,其包括机器人、车体、平衡组件、焊枪以及送丝机,机器人包括机械臂,机器人安装在车体的上端面上,车体上设置有车轮和脚杯,车轮和脚杯能够分别与支撑面接触,以使车体在移动状态和静止状态切换;平衡组件包括相连接的安装架和平衡器,安装架连接于车体;焊枪包括相连接的焊接部和线缆部,焊接部连接于机械臂,线缆部穿设于平衡器的挂设部;送丝机安装在车体上,线缆部背离焊接部的一端与送丝机的出线端连接。平衡组件和车体相互配合,只有在车体处于静置状态时,机器人的底座和车体不会发生移动,此时通过平衡器调节线缆部的平衡,才能防止车体的移动而影响线缆部的平衡性能。技术研发人员:胡德,张国平,王光能受保护的技术使用者:深圳市大族机器人有限公司技术研发日:20231121技术公布日:2024/9/17本文地址:https://www.jishuxx.com/zhuanli/20240919/299510.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表