用于无人机航磁测量沿地形缓起伏飞行的航线规划方法与流程
- 国知局
- 2024-09-19 14:41:45
本发明涉及一种无人机航磁测量的方法,具体地说是一种用于无人机航磁测量沿地形缓起伏飞行的航线规划方法。
背景技术:
1、无人机航磁测量作为一种地形适应能力强、可用于小面积、大比例尺快速部署的新型、有效的物探方法,在基础地质调查、矿产勘查、工程地质及灾害地质调查中应用越来越广泛,也是国家新一轮找矿突破战略行动和发展低空经济的重要组成部分;但是在地形切割剧烈、高差变化大、风车及高压线等干扰广泛分布的区域,如何获取高质量的航磁数据已成为研究热点,而高质量航磁数据获取的关键是合理选择飞行方式、飞行速度、离地高度保证航磁采集系统正常工作。
2、目前工业级、载重较大的多旋翼无人机本身不具备自动沿地形起伏飞行的能力,在执行航磁测量过程中,基于飞行安全和飞行效率的角度考虑,多选择固定海拔高度飞行,地形高差较小时,该方法完全可行。但是在地形高差大、起伏变化频繁时,造成航磁采集系统离地高度差异很大,采集的磁场数据多与地质体实际磁场特征存在差异,因此根据现有采集方式采集的磁场不能有效地解决地质体的分布情况;即使通过数据处理可以降低地形影响,但与实际情况的差异依然存在。因此,需要研究一种综合无人机飞行性能和航磁数据质量要求的沿地形缓起伏飞行方法。
技术实现思路
1、本发明的目的就是提供一种用于无人机航磁测量沿地形缓起伏飞行的航线规划方法,以解决采集的磁场数据与地质体实际磁场特征存在差异的问题。
2、本发明目的是这样实现的:
3、一种用于无人机航磁测量沿地形缓起伏飞行的航线规划方法,包括以下步骤:
4、s1.根据给定的飞行区域、航线方向和航线间距,设置无人机飞行的航线;
5、s2.获取无人机飞行区域内的地形高程数据,并对航线上干扰源的位置和高度进行踏勘,所述干扰源包括高压线、线塔、电力风车和居民点;
6、s3.选择至少有一条道路可到达,且有不小于10m2的平面位置作为无人机飞行的起降点,根据干扰源的高度和位置以及飞行区域的地形高程数据确定初设飞行控制点以及无人机在初设飞行控制点的飞行高度;
7、s4.根据相邻的初设飞行控制点的平距和高度差对初设飞行控制点以及无人机在初设飞行控制点的飞行高度进行校正,并计算校正后相邻的初设飞行控制点之间的水平飞行速度;
8、s5.根据无人机的续航时间以及相邻的初设飞行控制点之间的平距和飞行速度,确定无人机每次飞行过程中的实际飞行控制点;
9、s6.根据无人机每次飞行过程中的实际飞行控制点的位置,以及相邻的实际飞行控制点之间的水平飞行速度,制作飞行控制文件;将飞行控制文件发送至无人机,无人机根据飞行控制文件进行航磁测量。
10、进一步地,步骤s3中确定初设飞行控制点以及无人机在初设飞行控制点的飞行高度的具体方式为:
11、s3a-1.对地形高程数据进行网格化,确定每条航线的高程差;
12、s3a-2.根据地形高程数据和每条航线的起点和终点,按照5m的点距提取每条航线的地形高程数据;
13、s3a-3.绘制横坐标为航线长度,纵坐标为地形高程数据的地形剖面图;
14、s3a-4.对于航线长度大于等于100m的航线,当航线长度与所述航线的高程差的比值大于2时,将所述航线的起点、终点、地形极大值和地形极小值处确定为初设飞行控制点;
15、s3a-5.根据高压线、线塔、电力风车和居民点的聚集程度,将高压线、线塔、电力风车和居民点进行不同范围的划分,在每个范围内的高度最高的干扰源作为一处待定飞行控制点;
16、s3a-6.当待定飞行控制点的高度h干扰+30≤h+l时,所述待定飞行控制点所处位置不设置初设飞行控制点,当h干扰+30>h+l时,将所述待定飞行控制点确定为初设飞行控制点,其中,h为无人机离地飞行高度要求,l为无人机航磁系统吊挂长度;当初设飞行控制点为干扰源时,无人机在初设飞行控制点的飞行高度为所述初设飞行控制点的高度与30m之和;当初设飞行控制点不为干扰源时,无人机在初设飞行控制点的飞行高度为给定的无人机离地飞行高度要求与无人机航磁系统吊挂长度之和。
17、进一步地,步骤s4中对初设飞行控制点以及无人机在初设飞行控制点的飞行高度进行校正,并计算校正后相邻的初设飞行控制点之间的水平飞行速度的具体方式为:
18、s4-1.计算相邻的初设飞行控制点之间的水平飞行速度;
19、s4-2.若相邻的初设飞行控制点之间的水平飞行速度大于最大适飞速度,则在相邻的初设飞行控制点之间增加飞行控制点,重新计算无人机在相邻初设飞行控制点的水平飞行速度,直至无人机的飞行速度在适飞速度范围中;
20、s4-3.若相邻的初设飞行控制点之间的水平飞行速度小于最小适飞速度,则提高无人机在相邻的初设飞行控制点中海拔高度最低的初设飞行控制点的飞行高度,重新计算相邻的初设飞行控制点之间的水平飞行速度,直至无人机的飞行速度在适飞速度范围中。
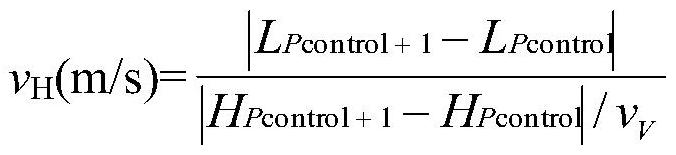
21、进一步地,步骤s4-1中飞行高度不同的相邻的初设飞行控制点的水平飞行速度的计算公式为:
22、
23、其中,lpconttol为无人机在相邻的初设飞行控制点的第一个初设飞行控制点的平距,lpconttol+1为无人机在相邻的初设飞行控制点的第二个初设飞行控制点的平距,hpconttol无人机在相邻的初设飞行控制点的第一个初设飞行控制点的飞行高度,hpconttol+1无人机在相邻的初设飞行控制点的第二个初设飞行控制点的飞行高度,vv为无人机的垂向起降速度;
24、飞行高度相同的相邻初设飞行控制点的水平飞行速度为无人机的经济巡航速度。
25、进一步地,确定每次飞行过程中的实际飞行控制点的具体方式为:
26、s5-1.在设置好的航线中,选择一个无人机待飞行的航线;
27、s5-2.将待飞行的航线起点处的初设飞行控制点确定为第一个实际飞行控制点,并计算无人机的飞行总时间;
28、s5-3.当无人机的飞行总时间比无人机的续航时间小,且飞行总时间与续航时间的差值大于最大预设时间时,沿着待飞行的航线的航线方向继续选择实际飞行控制点,直至无人机的飞行总时间小于无人机的续航时间,且与无人机的续航时间的差值在预设时间范围内,最后选择的初设飞行控制点为无人机飞行过程中的最后一个实际飞行控制点。
29、进一步地,步骤s5-2中计算无人机的飞行总时间的具体方式为:
30、s5-2-1.根据无人机飞行过程中相邻的初设飞行控制点之间的平距和水平飞行速度,计算无人机的有效飞行时间;
31、s5-2-2.根据起降点与无人机飞行过程中第一个实际飞行控制点的平距和给定的水平飞行速度,计算无人机的起飞时间;
32、s5-2-3.根据起降点与无人机飞行过程中最后一个实际飞行控制点的平距和给定的水平飞行速度,计算无人机的降落时间;
33、s5-2-4.将无人机的有效飞行时间、起飞时间和降落时间之和确定为无人机飞行总时间。
34、本发明提供了一种用于无人机航磁测量沿地形缓起伏飞行的航线规划方法,首先通过采集或下载工作区的dem数据,初步了解区内地形高差变化;其次根据航磁数据采集要求布置测线,按点距5m提取测线的dem数据,绘制横坐标为测线长度、纵坐标为海拔的地形剖面图,并将基于高分辨率遥感影像和实地踏勘的干扰源情况标注在地形剖面图上,在地形海拔数据剧烈变化、干扰源分布的位置确定初设飞行控制点;再根据飞行过程中水平飞行速度和垂向起降速度的设置,进行初设飞行控制点的校正;最后根据无人机每架次的有效飞行时间、飞行距离和起降点位置,合理确定每个架次的飞行任务,并制作无人机可识别格式的飞行控制文件;将其导入无人机飞行控制平台,进行仿真飞行、飞行评估,评估的飞行时间在无人机单架次有效续航时间内时,可以投入飞行。
35、本发明所述的航线规划方法中,按航线提取5m点距的dem数据,基于高分辨率遥感影像和实地踏勘干扰源情况,并结合飞行速度和航磁测量离地高度要求,最终精确确定初设飞行控制点的位置以及相邻的初设飞行控制点之间的飞行速度,是为了保障沿地形缓起伏飞行的安全性和航磁数据质量的可靠性。
36、本发明所述无人机航磁测量的航线规划方法,是基于地形条件、干扰源分布、无人机性能、数据采集要求以及起降点位置等因素综合考虑,精确确定初设飞行控制点及相邻的初设飞行控制点之间的速度,实现沿地形缓起伏,尽量确保航磁测量系统离地高度一致,该方法易于实现、成本低、效果好、易于操作、安全性高,在实际工作中既可以保障安全和飞行效率,又能保障获取的数据质量,为无人机航磁解决不同领域的地质问题提供依据。
本文地址:https://www.jishuxx.com/zhuanli/20240919/299666.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表