一种运用于工程机械的重载AGV的制作方法
- 国知局
- 2024-09-19 14:49:50
本发明涉及导引运输车,具体涉及一种运用于工程机械的重载agv。
背景技术:
1、agv是指装备有电磁或光学等自动导引装置,它能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,而随着agv运输车的不断发展,在一些重工业领域中,也出现了用于运输重工程器械的重载agv,如在大车自动化组装中,对大车底盘进行运输。
2、而现有的运用于工程机械的重载agv在使用过程中,还存在以下缺陷:
3、1、重载agv在运输过程中,为了能够准确定点拿取和放下工程器械,重载agv移动的精度就尤为重要,因此为了保证行进轮转动移动的精准度,在行进过程中,需要在行进轮的外围安装清扫组件,来避免行进轮的污染,同时避免异物阻挡行进轮旋转,而传统的清扫组件是通过安装贴附于地面的海绵来实现,但清扫效果差,且作用时间短,而一些安装有清扫刷的重载agv,由于行进轮会进行各种不同方向的转动,因此清扫刷需要在行进轮外围圆形分布,同时均与地面相接触,因此在转动清扫的过程中,与地面接触面积较大,加快了清扫刷的磨损,使得使用时间变短,增大更换频率。
4、2、重载agv所运输工程器械较重,而现有的agv运输车无法自动定点支撑和放下运输货物,因此在取放过程中,还需要运用工厂起重设备,操作麻烦,降低了运输效率。
技术实现思路
1、本发明的目的在于:为解决上述传统清扫组件清扫效果差,且作用时间短,圆形清扫刷与地面接触面积较大,加快了清扫刷的磨损,使得使用时间变短,以及在运输重工程器械时,在取放过程中,还需要运用工厂起重设备,操作麻烦,降低了运输效率的问题,本发明提供了一种运用于工程机械的重载agv。
2、本发明为了实现上述目的具体采用以下技术方案:
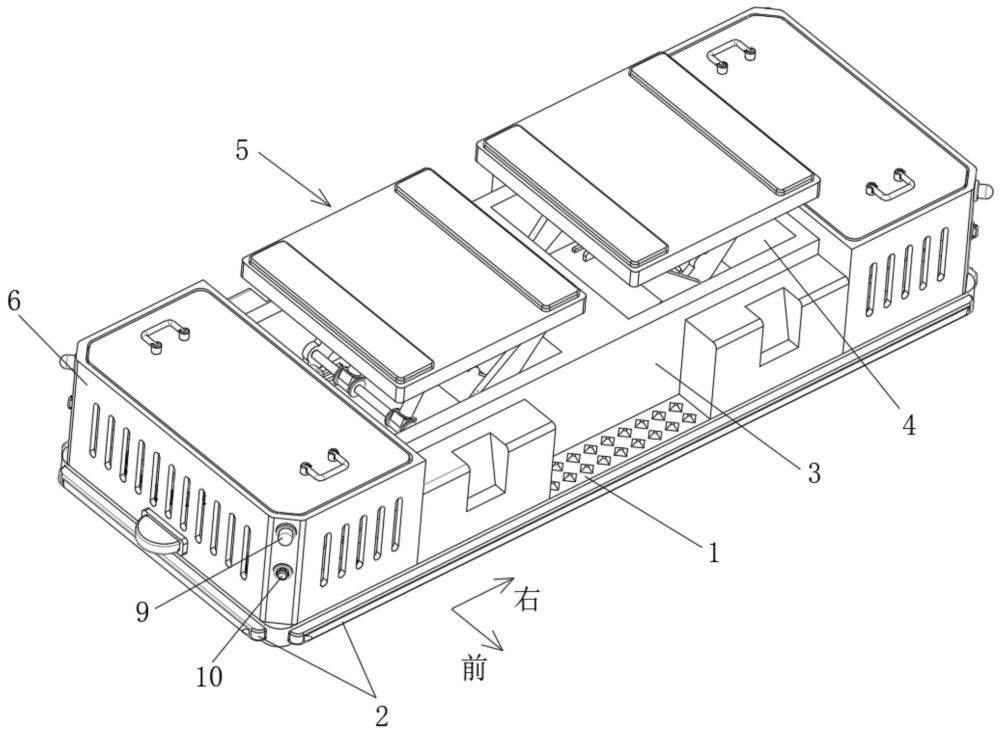
3、一种运用于工程机械的重载agv,包括底板,所述底板的四周固定安装有防撞条,所述底板顶端的中部固定安装有安装框,所述安装框顶部的左右两侧对称开设有凹槽,所述凹槽的内部均设置有升降支撑组件,所述升降支撑组件用于放置工程器械,同时能够进行升降移动,所述底板顶端安装框的左右两侧对称固定安装有控制箱,所述控制箱的内部设置有行进组件,所述行进组件用于驱动底板进行移动。
4、进一步地,所述升降支撑组件包括支撑板,所述安装框顶部凹槽处的上方对称设置有支撑板,所述支撑板顶端左右两侧对称固定安装有橡胶板,所述橡胶板用于工程器械的稳定放置,所述支撑板底端与凹槽内部底部之间前后对称设置有外支撑杆,所述支撑板底端与凹槽内部底部之间外支撑杆的内侧均设置有内支撑杆,前后两侧对称设置的外支撑杆和内支撑杆交叉分布,且中部相互铰接,所述外支撑杆顶部靠近安装框中央的一侧与支撑板底端相铰接,所述内支撑杆底部靠近安装框中央的一侧与凹槽内部底部相铰接,因此在外支撑杆和内支撑杆交叉移动过程中能够带动支撑板上下移动,所述外支撑杆底部远离安装框中央的一侧、以及所述内支撑杆顶部远离安装框中央的一侧均限位转动连接有滚轮,所述外支撑杆底部之间固定安装有固定轴一,所述内支撑杆顶部之间固定安装有固定轴二,所述固定轴一与固定轴二之间设置有液压杆,所述液压杆两侧分别与固定轴一与固定轴二限位转动连接。
5、进一步地,所述支撑板底端远离安装框中央的一侧、以及所述凹槽内部底部远离安装框中央的一侧均前后对称固定安装有限位滑道,所述限位滑道用于对滚轮的滚动进行限位,来保证外支撑杆和内支撑杆所形成交叉杆的稳定交叉移动。
6、进一步地,单组所述固定轴一与固定轴二之间液压杆的数量为两个,且在固定轴一与固定轴二之间对称分布,两个所述液压杆通过同一油路同步控制伸缩,进而来提高推动外支撑杆和内支撑杆交叉移动的力度和稳定性,同时保证对于支撑板的稳定支撑。
7、进一步地,所述行进组件包括横板,所述控制箱的内部均固定安装有横板,所述横板的下方前后对称连接有连接板,所述连接板顶端与横板底端之间均匀固定安装有减震块,来对移动过程中的颠簸进行缓冲,所述连接板底端的中央固定安装有安装块,所述安装块的底部限位传动连接有安装架,所述安装块内可通过系统控制驱动安装架进行转动,进而来改变行进轮的方向,所述安装架底部传动连接有行进轮,所述安装架外侧固定安装有驱动电机,所述驱动电机用于驱动行进轮进行旋转,实现各个行进轮的单独驱动。
8、进一步地,所述连接板底部行进轮的外围设置有清扫组件,所述清扫组件包括转环,所述连接板的底部限位转动连接有转环,所述转环的两侧对称限位转动连接有转筒,所述转筒的底部滑动连接有连接杆,所述连接杆底端与转筒内壁之间固定连接有弹簧,使得连接杆可以弹性伸缩,所述连接杆底端限位转动连接有圆环,所述圆环包裹在行进轮的外侧,所述安装架顶部两侧对称固定安装有限位块,所述限位块内部之间限位滑动连接有清洁板,所述连接杆底部内侧与清洁板两端之间传动连接有传动杆,所述圆环底部限位转动连接有转盘,所述圆环底端固定安装有马达,所述马达用于驱动转盘在圆环底部进行旋转,所述转盘的底部固定连接有清洁刷,所述清洁刷的底部斜向外侧倾斜,有利于地面杂物的向外扫除。
9、进一步地,所述清洁板的底端固定连接有擦拭布,且所述清洁板底端与行进轮顶端相切,并与行进轮顶端相贴附,进而在行进轮旋转过程中,清洁板能够对行进轮表面进行擦拭,同时利用行进轮与清洁板之间的摩擦力,能够带动清洁板朝向行进方向一侧移动。
10、进一步地,所述传动杆相邻一侧与清洁板两端相铰接,另一侧向下倾斜后与连接杆底部内侧相铰接,因此在清洁板移动过程中,能够带动连接杆伸缩倾斜,进而使圆环发生倾斜。
11、进一步地,左右两侧所述控制箱相互远离一侧的拐角处均固定安装有警示灯和紧急开关,使得警示灯位于四周,便于各个方向进行观察,同时四周均有紧急开关,便于在发生紧急情况时,从不同方向均能够按下紧急开关。
12、本发明的有益效果如下:
13、1、本发明,通过行进组件和清扫组件的配合设计,能够对行进轮进行擦拭清洁的同时,在驱动安装架转动改变前进方向,以及驱动行进轮旋转进行前进或后退的过程中,始终能够使圆环带动转盘和清洁刷位于行进轮前进的一侧向下倾斜,进而使位于行进轮前进一侧的清洁刷向下与地面接触,其余脱离地面,在保证能够对行进轮前进一侧的地面进行清扫,避免对于行进轮造成污染和阻挡,保证移动精度的同时,也能够减小了清洁刷与地面的接触面积,减缓了清洁刷的磨损,提高了使用寿命,进而降低清洁刷的更换频率。
14、2、本发明,通过行进组件与升降支撑组件的设计,利用对于行进轮前进方向和旋转的独立控制,使得移动更加灵活,有利于在复杂的允许通过路径下,来完成工程器械的顶点取放和运输,同时能够自身抬升和下移工程器械,不需要借助工厂起重设备就能够实现工程器械的取放,有利于工程器械的智能化精准运输,更加方便快捷。
技术特征:1.一种运用于工程机械的重载agv,包括底板(1),其特征在于,所述底板(1)的四周固定安装有防撞条(2),所述底板(1)顶端的中部固定安装有安装框(3),所述安装框(3)顶部的左右两侧对称开设有凹槽(4),所述凹槽(4)的内部均设置有升降支撑组件(5),所述升降支撑组件(5)用于放置工程器械,同时能够进行升降移动,所述底板(1)顶端安装框(3)的左右两侧对称固定安装有控制箱(6),所述控制箱(6)的内部设置有行进组件(7);
2.根据权利要求1所述的运用于工程机械的重载agv,其特征在于,所述升降支撑组件(5)包括:
3.根据权利要求2所述的运用于工程机械的重载agv,其特征在于,所述支撑板(51)顶端左右两侧对称固定安装有橡胶板(511)。
4.根据权利要求2所述的运用于工程机械的重载agv,其特征在于,所述支撑板(51)底端远离安装框(3)中央的一侧、以及所述凹槽(4)内部底部远离安装框(3)中央的一侧均前后对称固定安装有限位滑道(58),所述限位滑道(58)用于对滚轮(54)的滚动进行限位。
5.根据权利要求2所述的运用于工程机械的重载agv,其特征在于,单组所述固定轴一(55)与固定轴二(56)之间液压杆(57)的数量为两个,且在固定轴一(55)与固定轴二(56)之间对称分布,两个所述液压杆(57)通过同一油路同步控制伸缩。
6.根据权利要求1所述的运用于工程机械的重载agv,其特征在于,所述行进组件(7)还包括:
7.根据权利要求1所述的运用于工程机械的重载agv,其特征在于,所述清扫组件(8)还包括:
8.根据权利要求1所述的运用于工程机械的重载agv,其特征在于,所述清洁板(87)的底端固定连接有擦拭布,且所述清洁板(87)底端与行进轮(76)顶端相切,并与行进轮(76)顶端相贴附。
9.根据权利要求1所述的运用于工程机械的重载agv,其特征在于,所述传动杆(88)相邻一侧与清洁板(87)两端相铰接,另一侧向下倾斜后与连接杆(83)底部内侧相铰接。
10.根据权利要求1-9任一项所述的运用于工程机械的重载agv,其特征在于,左右两侧所述控制箱(6)相互远离一侧的拐角处均固定安装有警示灯(9)和紧急开关(10)。
技术总结本发明公开了一种运用于工程机械的重载AGV,涉及导引运输车技术领域。本发明包括底板,所述底板的四周固定安装有防撞条,所述底板顶端的中部固定安装有安装框,所述安装框顶部的左右两侧对称开设有凹槽,所述凹槽的内部均设置有升降支撑组件,所述升降支撑组件用于放置工程器械,所述底板顶端安装框的左右两侧对称固定安装有控制箱。本发明能够保证行进轮的洁净度,提高移动精度的同时,能够更加针对性地对行进轮前侧的地面进行清扫,减小了清洁刷与地面的接触面积,减缓了清洁刷的磨损,提高了使用寿命,进而降低清洁刷的更换频率,不需要借助工厂起重设备就能够实现工程器械的取放,有利于工程器械的智能化精准运输,更加方便快捷。技术研发人员:邹攀,袁志勇受保护的技术使用者:湖南驰众机器人股份有限公司技术研发日:技术公布日:2024/9/17本文地址:https://www.jishuxx.com/zhuanli/20240919/300502.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表