一种多圈角位移控制系统的制作方法
- 国知局
- 2024-09-19 15:01:10
本技术涉及位移控制相关,特别涉及一种多圈角位移控制系统。
背景技术:
1、精确控制角位移是位置控制中比较难的,特别在空间有限的情况下,多圈角位移控制更是困难,它在智能机器人和数控机床等精密仪器领域应用广泛。步进电机的角位移控制一般是在其后端安装编码器,通过编码器测量和记录步进电机上转轴的角位移并反馈给单片机,通单片机控制步进电机转动情况,但是步进电机最终驱动其它部件或机构实现的角位移与编码器记录的具有一定的偏差,并不能实现精准控制,如何研究能够设计出一种能够对偏差进行矫正、精准控制的多圈角位移控制系统,具有十分重要的现实意义和实用价值。
技术实现思路
1、为了克服现有的技术缺陷,本实用新型的目的在于提供一种多圈角位移控制系统以解决上述技术问题。
2、本实用新型解决技术问题所采用的技术方案如下:
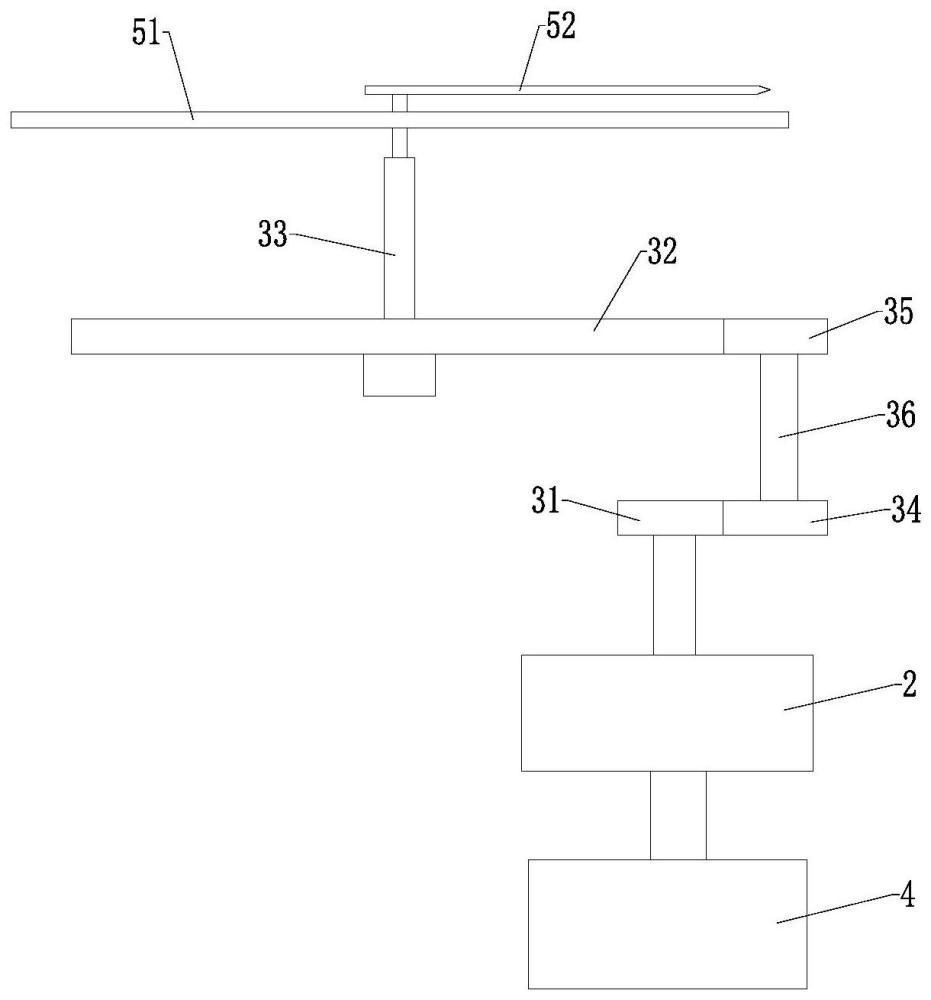
3、根据本实用新型的一个方面,设计出一种多圈角位移控制系统,包括:单片机、步进电机、传动机构、绝对式编码器以及角位移显示机构,所述单片机与所述步进电机电性连接,所述绝对式编码器安装于所述步进电机后端,以测量和记录步进电机上转轴的角位移,绝对式编码器与所述单片机电性连接,所述步进电机的输出端与所述传动机构传动连接,所述角位移显示机构包括刻度盘和设于刻度盘前侧的指针,所述传动机构与所述指针驱动连接,以驱动指针转动。
4、为了更好的解决上述技术缺陷,本实用新型还具有更佳的技术方案:
5、在一些实施方式中,所述传动机构包括第一齿轮、第二齿轮和连接轴,所述第一齿轮安装在所述步进电机的转轴上,所述第二齿轮安装在所述连接轴上,并与第一齿轮啮合,所述连接轴穿过所述刻度盘上通孔与所述指针连接。
6、在一些实施方式中,所述传动机构还包括第三齿轮、第四齿轮以及传动轴,所述传动轴一端与所述第三齿轮连接,另一端与所述第四齿轮连接,所述第三齿轮与所述第一齿轮啮合,所述第四齿轮与所述第二齿轮啮合。
7、在一些实施方式中,所述单片机电性连接有串口通信模块,所述串口通信模块与控制计算机电性连接。
8、本实用新型的技术效果为:
9、单片机是这个控制系统的核心,与控制计算机电性连接,接收控制计算机发来的角位移指令,单片机并且将角位移信息反馈给给仪表控制计算机。在这个系统中,单片机发送控制信息给步进电机,步进电机通过传动机构驱动角位移显示机构上的指针转动,绝对编码器测量和记录步进电机上转轴的角位移信息并传送给单片机,对于数码进行处理、识别,判断出步进电机转轴的角位移当前的状态和位置,通过将刻度盘上指针指示的角位移信息,输入到单片机,然后,单片机将输入的角位移信息与接收的绝对式编码器的角位移信息进行比较,判断是否有偏差,如果有偏差,需要经过计算,根据计算的结果来控制步进电机运行对角位移进行校正,实现角位移的精确控制。另外,单片机还对绝对编码器返回的零位进行识别,使该角位移控制系统在掉电和运行出现紊乱时,能够在重新启动的条件下重新找到起始位置即零位。
技术特征:1.一种多圈角位移控制系统,其特征在于,包括:单片机、步进电机、传动机构、绝对式编码器以及角位移显示机构,所述单片机与所述步进电机电性连接,所述绝对式编码器安装于所述步进电机后端,以测量和记录步进电机上转轴的角位移,绝对式编码器与所述单片机电性连接,所述步进电机的输出端与所述传动机构传动连接,所述角位移显示机构包括刻度盘和设于刻度盘前侧的指针,所述传动机构与所述指针驱动连接,以驱动指针转动。
2.根据权利要求1所述的一种多圈角位移控制系统,其特征在于,所述传动机构包括第一齿轮、第二齿轮和连接轴,所述第一齿轮安装在所述步进电机的转轴上,所述第二齿轮安装在所述连接轴上,并与第一齿轮啮合,所述连接轴穿过所述刻度盘上通孔与所述指针连接。
3.根据权利要求2所述的一种多圈角位移控制系统,其特征在于,所述传动机构还包括第三齿轮、第四齿轮以及传动轴,所述传动轴一端与所述第三齿轮连接,另一端与所述第四齿轮连接,所述第三齿轮与所述第一齿轮啮合,所述第四齿轮与所述第二齿轮啮合。
技术总结本技术公开了一种多圈角位移控制系统,包括:单片机、步进电机、传动机构、绝对式编码器以及角位移显示机构,单片机与步进电机电性连接,绝对式编码器安装于步进电机后端,以测量和记录步进电机上转轴的角位移,绝对式编码器与所述单片机电性连接,步进电机的输出端与传动机构传动连接,角位移显示机构包括刻度盘和设于刻度盘前侧的指针,传动机构与指针驱动连接,以驱动指针转动;通过将刻度盘上指针指示的角位移信息,输入到单片机,然后,单片机将输入的角位移信息与接收的绝对式编码器的角位移信息进行比较,判断是否有偏差,如果有偏差,需要经过计算,根据计算的结果来控制步进电机运行对角位移进行校正,实现角位移的精确控制。技术研发人员:杜延春,刘毅,许鹏,王泉,杨雷,刘汉阳,李世君,刘媛,夏华,叶超,王弘达受保护的技术使用者:山东省计量科学研究院技术研发日:20240220技术公布日:2024/9/17本文地址:https://www.jishuxx.com/zhuanli/20240919/301508.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表