双工位弧焊机器人工作站的制作方法
- 国知局
- 2024-09-23 15:03:01
本技术涉及弧焊机器人,具体涉及双工位弧焊机器人工作站。
背景技术:
1、焊接机器人是从事焊接的工业机器人,根据国际标准化组织工业机器人属于标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机,具有三个或更多可编程的轴,用于工业自动化领域,为了适应不同的用途,机器人最后一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器,焊接机器人就是在工业机器人的末轴法兰装接焊钳,使之能进行焊接,切割或热喷涂。
2、现有技术中,公开号为cn215238477u的专利文件中,提出一种双工位弧焊机器人工作站,包括座架、焊接台和防护壳,所述座架包括底板和立架,所述立架对称设置在底板的上端面,且立架与底板垂直固定连接,所述焊接台安装在立架的头部,且焊接台与立架转动连接,所述防护壳安装在底板的前端面,且防护壳与底板转动连接,保证使用者需要焊接的时候可以稳定的将待加工的工件固定在摆台上,保证工件在摆台可以稳定的进行摆放,当工件摆放好以后使用者就可以通过外部的焊机进行焊接作业,在需要调整焊接角度的时候可以稳定的控制驱动电机来带动转杆同步进行转动,进而达到改变焊接台整体的角度。
3、针对现有技术存在以下问题:
4、该双工位弧焊机器人工作站在使用过程中不方便调节双工位弧焊机器人的位置,同时在使用过程中无法对工件进行夹持限位,进而降低了双工位弧焊机器人工作站的实用性。
技术实现思路
1、本实用新型的目的在于提供双工位弧焊机器人工作站,以解决上述背景技术中提出的问题。
2、为解决上述技术问题,本实用新型所采用的技术方案是:
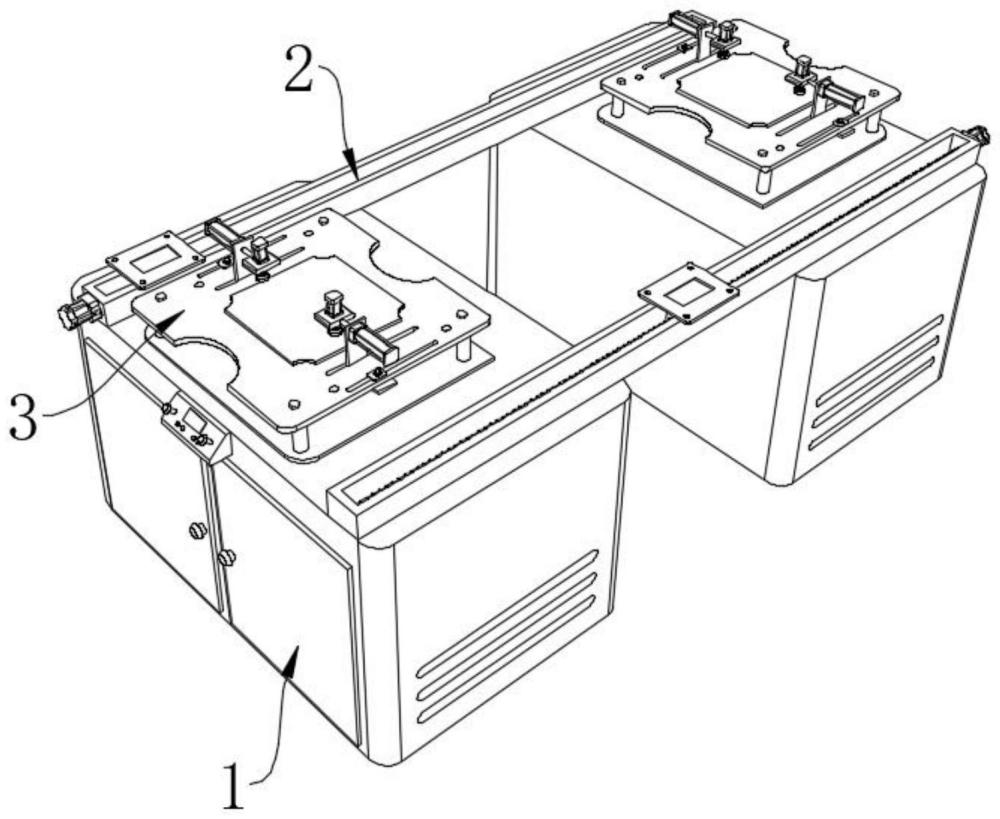
3、双工位弧焊机器人工作站,适用弧焊机器人安装工作,包括工作台;设置在所述工作台上表面的移动单元;以及设置在所述工作台上表面的夹持单元,所述移动单元包括有设置在工作台上表面的安装组件和设置在安装组件外表面的驱动组件,所述夹持单元包括有设置在工作台上表面的调节组件和设置在调节组件外表面的夹持组件。
4、本实用新型技术方案的进一步改进在于:所述安装组件包括有调节槽体,所述调节槽体的底面与工作台的上表面固定连接。
5、本实用新型技术方案的进一步改进在于:所述驱动组件包括有驱动电机,所述驱动电机的一侧与调节槽体的外表面可拆卸式连接,所述驱动电机的输出端固定连接有丝杆,所述丝杆的另一端与调节槽体的内壁转动连接。
6、采用上述技术方案,采用调节槽体和驱动电机的配合,可方便带动丝杆转动。
7、本实用新型技术方案的进一步改进在于:所述丝杆的外表面螺纹连接有移动块,所述移动块的外表面与调节槽体的内壁滑动连接,所述移动块的上表面固定连接有安装板。
8、采用上述技术方案,采用移动块和安装板的相互配合可方便带动安装板在水平方向上移动,通过安装板可将弧焊机器人安装在安装板的外表面,从而方便调节弧焊机器人的位置。
9、本实用新型技术方案的进一步改进在于:所述调节组件包括有安装支架,所述安装支架的底面与工作台的上表面固定连接,所述安装支架的上表面开设有通槽,所述通槽的内壁滑动连接有螺栓固定座,所述螺栓固定座的外表面螺纹连接有l型板,所述l型板的外表面与安装支架的外表面滑动连接。
10、采用上述技术方案,采用安装支架、l型板和螺栓固定座的相互配合,可方便根据需求调节l型板在安装支架上表面的位置,从而方便对工件进行夹持。
11、本实用新型技术方案的进一步改进在于:所述夹持组件包括有液压缸,所述液压缸的一侧与l型板的外表面可拆卸式连接,所述液压缸的伸缩端可拆卸式连接有连接块。
12、采用上述技术方案,采用液压缸和连接块的相互配合可方便调节连接块在水平方向上的位置。
13、本实用新型技术方案的进一步改进在于:所述连接块的上表面可拆卸式连接有气动气缸,所述气动气缸的伸缩端可拆卸式连接有夹持板。
14、采用上述技术方案,采用气动气缸和夹持板的相互配合可方便带动夹持板下降,从而方便对工件进行夹持。
15、由于采用了上述技术方案,本实用新型相对现有技术来说,取得的技术进步是:
16、1、本实用新型提供双工位弧焊机器人工作站,采用调节槽体、驱动电机、丝杆、移动块和安装板的相互配合,可方便调节安装板在水平方向上的位置,进而方便根据需求调节弧焊机器人的位置。
17、2、本实用新型提供双工位弧焊机器人工作站,采用安装支架、l型板、螺栓固定座、液压缸、连接块、气动气缸和夹持板的相互配合可方便调节夹持板在水平方向和竖直方向上的位置,进而方便根据需求对工件进行夹持,从而防止工件在焊接过程中发生移动。
技术特征:1.双工位弧焊机器人工作站,适用弧焊机器人安装工作,包括工作台(1);
2.根据权利要求1所述的双工位弧焊机器人工作站,其特征在于:所述安装组件包括有调节槽体(21),所述调节槽体(21)的底面与工作台(1)的上表面固定连接。
3.根据权利要求2所述的双工位弧焊机器人工作站,其特征在于:所述驱动组件包括有驱动电机(22),所述驱动电机(22)的一侧与调节槽体(21)的外表面可拆卸式连接,所述驱动电机(22)的输出端固定连接有丝杆(23),所述丝杆(23)的另一端与调节槽体(21)的内壁转动连接。
4.根据权利要求3所述的双工位弧焊机器人工作站,其特征在于:所述丝杆(23)的外表面螺纹连接有移动块(24),所述移动块(24)的外表面与调节槽体(21)的内壁滑动连接,所述移动块(24)的上表面固定连接有安装板(25)。
5.根据权利要求1所述的双工位弧焊机器人工作站,其特征在于:所述调节组件包括有安装支架(31),所述安装支架(31)的底面与工作台(1)的上表面固定连接,所述安装支架(31)的上表面开设有通槽(311),所述通槽(311)的内壁滑动连接有螺栓固定座(33),所述螺栓固定座(33)的外表面螺纹连接有l型板(32),所述l型板(32)的外表面与安装支架(31)的外表面滑动连接。
6.根据权利要求5所述的双工位弧焊机器人工作站,其特征在于:所述夹持组件包括有液压缸(34),所述液压缸(34)的一侧与l型板(32)的外表面可拆卸式连接,所述液压缸(34)的伸缩端可拆卸式连接有连接块(35)。
7.根据权利要求6所述的双工位弧焊机器人工作站,其特征在于:所述连接块(35)的上表面可拆卸式连接有气动气缸(36),所述气动气缸(36)的伸缩端可拆卸式连接有夹持板(37)。
技术总结本技术公开了双工位弧焊机器人工作站,涉及弧焊机器人技术领域,适用弧焊机器人安装工作,包括工作台;设置在所述工作台上表面的移动单元;以及设置在所述工作台上表面的夹持单元,所述移动单元包括有设置在工作台上表面的安装组件和设置在安装组件外表面的驱动组件。本技术通过采用调节槽体、驱动电机、丝杆、移动块和安装板的相互配合,可方便调节安装板在水平方向上的位置,进而方便根据需求调节弧焊机器人的位置,采用安装支架、L型板、螺栓固定座、液压缸、连接块、气动气缸和夹持板的相互配合可方便调节夹持板在水平方向和竖直方向上的位置,进而方便根据需求对工件进行夹持,从而防止工件在焊接过程中发生移动。技术研发人员:曾昭武,钱进,程建兵受保护的技术使用者:昆山凯立威自动化设备有限公司技术研发日:20240202技术公布日:2024/9/19本文地址:https://www.jishuxx.com/zhuanli/20240923/305344.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表