一种可控升降多足卷展机构及其卷展方法
- 国知局
- 2024-10-09 15:56:10
本发明涉及一种可控升降多足卷展机构及其卷展方法,涉及机械结构。
背景技术:
1、随着科学技术的发展,以及人类探索太空的手段增加,在运载火箭的设计过程中,火箭的有效载荷体积的尺寸和几何形状限制,对于卫星升降平台的轻量化、功能化需求逐步增加。在适应发射与运载过程恶劣的动力学环境的同时,要求平台具有轻质高强、空间利用率高等特点,进一步提升航天器的有效载荷,降低经济成本。
2、故本发明针对以上不足,结合薄壁伸缩杆和并联机构的优势,设计一种可控升降多足卷展机构,具有空间收纳率高、结构卷展稳定等特点,可实现重复展开、收拢等动作模式,满足复杂多变的环境需求,提高航天器的有效载荷,具有良好的社会经济效益。
技术实现思路
1、鉴于现有技术的不足,本发明所要解决的技术问题是提供一种可控升降多足卷展机构及其卷展方法。
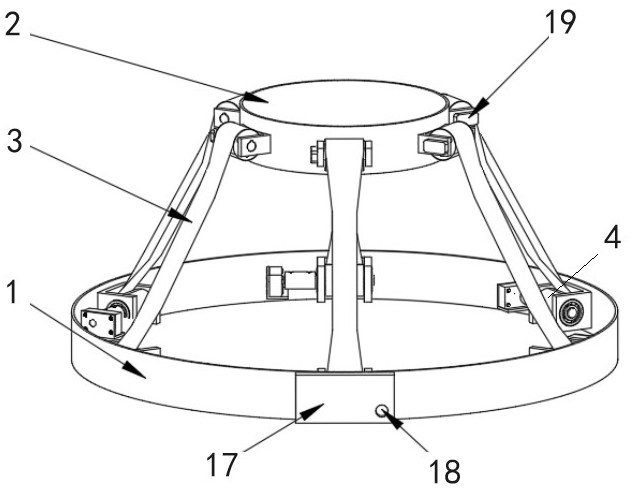
2、为了解决上述技术问题,本发明的技术方案是:一种可控升降多足卷展机构,包括基座与升降组件,所述基座与升降组件之间经圆周均布的若干薄壁伸缩杆相连接,所述薄壁伸缩杆均经电动机构驱动伸缩。
3、优选的,所述基座包括薄壁外圆环,所述薄壁外圆环的内周壁上圆周均布有数量与薄壁伸缩杆相同且一一对应的传动轴固定架,所述传动轴固定架上均转动连接有传动轴,所述传动轴上均同轴固连有滚筒。
4、优选的,所述传动轴与传动轴固定架之间均设置有轴承。
5、优选的,所述电动机构均包括位于传动轴固定架旁侧的电机固定架,所述电机固定架均固定在薄壁外圆环的内周壁上,且电机固定架上均固连有电机,所述电机的输出轴均同轴固连有联轴器,所述联轴器的输出端均与传动轴同轴固连。
6、优选的,所述薄壁伸缩杆的一端均铆接于对应滚筒上。
7、优选的,所述薄壁伸缩杆的截面形状为c型。
8、优选的,所述升降组件为升降平台,所述升降平台包括薄壁内圆环,所述薄壁内圆环的外周壁上圆周均布有数量与薄壁伸缩杆相同且一一对应的固定轴支架,所述固定轴支架上均过盈配合有固定轴,所述固定轴上均同轴设置有固定筒。
9、优选的,所述薄壁伸缩杆的另一端均铆接于对应固定筒上。
10、优选的,所述基座上设置有控制模块及电源,所述升降组件在每个薄壁伸缩杆的旁侧均设置有激光测距传感器。
11、一种可控升降多足卷展机构的卷展方法,按以下步骤进行:
12、(1)展开动作:卷展机构在收拢状态下,基座与升降组件位于同一水平位置,本机构处于初始状态;将各模块复位,启动控制模块,驱动电机转动,联轴器带动滚筒转动,使得薄壁伸缩杆同步展开,将升降组件推出;在升降组件移动过程中,由激光测距传感器实时将升降组件的高度反馈给上位机;当升降组件达到指定高度时,控制模块下发指令电机停止转动,即完成多足卷展机构的展开;
13、(2)收拢动作:卷展机构在展开状态下,基座与升降组件处于不同水平位置,启动控制模块,驱动电机转动,电机通过联轴器带动滚筒转动,使得薄壁伸缩杆同步卷拢,将升降组件收拢;在升降组件移动过程中,由激光测距传感器实时将升降组件的高度反馈给上位机;当升降组件下降至与基座同一水平位置时,控制模块下发指令电机停止转动,即完成多足卷展机构的收拢。
14、与现有技术相比,本发明具有以下有益效果:
15、(1)本发明中,使用薄壁伸缩杆和控制模块、激光测距传感器,可以实现本机构远程控制、无人化操作。
16、(2)本发明中,采用模块化设计,可以根据实际需求调整薄壁伸缩杆的长度,满足多样化设计需求。
17、(3)本发明中具有空间利用率、结构卷展稳定等优势,可进一步提高航天器的有效载荷,适用于复杂多变的应用环境。
18、下面结合附图和具体实施方式对本发明做进一步详细的说明。
技术特征:1.一种可控升降多足卷展机构,其特征在于:包括基座与升降组件,所述基座与升降组件之间经圆周均布的若干薄壁伸缩杆相连接,所述薄壁伸缩杆均经电动机构驱动伸缩。
2.根据权利要求1所述的可控升降多足卷展机构,其特征在于:所述基座包括薄壁外圆环,所述薄壁外圆环的内周壁上圆周均布有数量与薄壁伸缩杆相同且一一对应的传动轴固定架,所述传动轴固定架上均转动连接有传动轴,所述传动轴上均同轴固连有滚筒。
3.根据权利要求2所述的可控升降多足卷展机构,其特征在于:所述传动轴与传动轴固定架之间均设置有轴承。
4.根据权利要求2所述的可控升降多足卷展机构,其特征在于:所述电动机构均包括位于传动轴固定架旁侧的电机固定架,所述电机固定架均固定在薄壁外圆环的内周壁上,且电机固定架上均固连有电机,所述电机的输出轴均同轴固连有联轴器,所述联轴器的输出端均与传动轴同轴固连。
5.根据权利要求2所述的可控升降多足卷展机构,其特征在于:所述薄壁伸缩杆的一端均铆接于对应滚筒上。
6.根据权利要求1所述的可控升降多足卷展机构,其特征在于:所述薄壁伸缩杆的截面形状为c型。
7.根据权利要求1所述的可控升降多足卷展机构,其特征在于:所述升降组件为升降平台,所述升降平台包括薄壁内圆环,所述薄壁内圆环的外周壁上圆周均布有数量与薄壁伸缩杆相同且一一对应的固定轴支架,所述固定轴支架上均过盈配合有固定轴,所述固定轴上均同轴设置有固定筒。
8.根据权利要求7所述的可控升降多足卷展机构,其特征在于:所述薄壁伸缩杆的另一端均铆接于对应固定筒上。
9.根据权利要求1所述的可控升降多足卷展机构,其特征在于:所述基座上设置有控制模块及电源,所述升降组件在每个薄壁伸缩杆的旁侧均设置有激光测距传感器。
10.一种如权利要求1-9任一所述的可控升降多足卷展机构的卷展方法,其特征在于,按以下步骤进行:
技术总结本发明涉及一种可控升降多足卷展机构,包括基座与升降组件,所述基座与升降组件之间经圆周均布的若干薄壁伸缩杆相连接,所述薄壁伸缩杆均经电动机构驱动伸缩。本机构结合了薄壁伸缩杆和并联机构的优势,可使平台在升降过程保持静态稳定,承载能力好,微动精度高,同步性好;同时,兼具空间收纳率高,结构稳定等特点,可实现重复展开/收拢等动作模式,满足复杂多变的工作环境需求。技术研发人员:王冰,胡智超,杜冬梅,赵陈敏,关成龙,钟舜聪受保护的技术使用者:福州大学技术研发日:技术公布日:2024/9/26本文地址:https://www.jishuxx.com/zhuanli/20240929/310871.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表