一种泵站智能机器人巡检系统的制作方法
- 国知局
- 2024-10-09 14:37:22
本发明属于智慧水利,具体的,涉及一种泵站智能机器人巡检系统。
背景技术:
1、现有的水利泵站的系统生命周期全过程监控主要依赖于安装各类传感器、安装热成像、红外温度监测、漏水传感器等用于设备的健康趋势监测或者是故障监测,但是其需要大量的敷设电力及信号电缆。安装以及后期维护难度较大,降低了工作效率。基于上述缺点,现有技术中很多泵站系统是通过机器人巡检系统来实现对泵站的巡检,以实现智能化的快速泵站巡检控制。
2、目前都是使用地面行走的机器人,包括滚轮式或者导轨式,在泵站路面复杂的情况下,不能很好地完成巡检工作。地面行走机器人在不同的设备巡检过程中,需要复杂的控制机构,保证传感器能够达到指定的巡检位置,从而增加了系统的复杂性和难以维护性,对于地面行驶的机器人,高度固定,对于不同高度的设备进行巡检,需要增加伸缩机构和电控系统,增加了装置的复杂度。对于导轨式巡检机器人,巡检路线固定,而且在泵站室内建设导轨,不利于人工站内行走;而且铺设导轨破坏了站内的原有设计,为了解决上述问题,本发明提供了以下技术方案。
技术实现思路
1、本发明的目的在于提供一种泵站智能机器人巡检系统,解决现有技术中采用地面行走机器人对泵站内部进行巡检时,效率低下且巡检区域爱垂直空间上受限的问题。
2、本发明的目的可以通过以下技术方案实现:
3、一种泵站智能机器人巡检系统,包括:
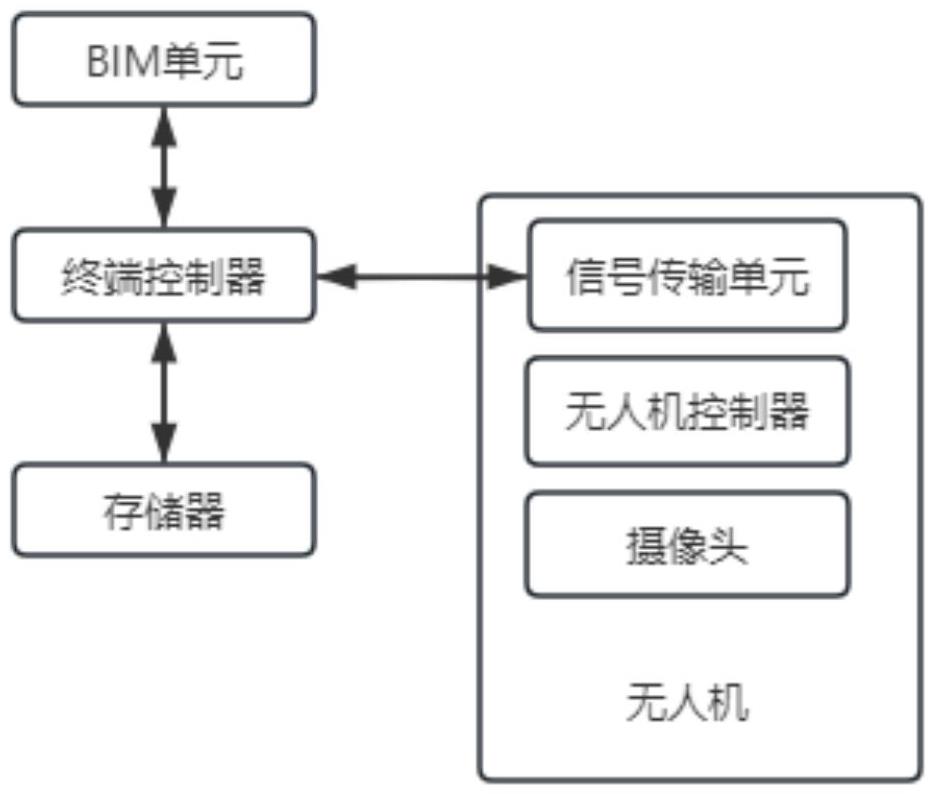
4、无人机,集成在无人机上的摄像头、信号传输单元以及无人机控制器;用于建立泵站巡检区域三维模型图的bim单元以及对无人机在巡检时的飞行速度进行计算的终端控制器;
5、终端控制器对无人机飞行速度进行计算的方法包括如下步骤:
6、第一步,通过bim单元建立泵站巡检区域的三维模型图并规划无人机在泵站巡检区域内的巡检路线;
7、第二步,获取巡检路线中巡检点的数量以及各巡检点在bim三维模型中的空间坐标;获取无人机在三维模型中的空间坐标;
8、根据无人机的空间坐标以及对应巡检路段内巡检点空间坐标计算得到无人机与各巡检点之间的距离r;
9、第三步,在无人机按照规划的巡检路线进行巡检工作时,获取无人机与各巡检点之间的直线距离l;
10、在一个时刻,当一个巡检点与无人机之间的直线距离l满足l大于等于预设的距离值l1时,则认为在该时刻,对应巡检点为无人机的参考点;间歇获取无人机对应的参考点集合;
11、第四步,根据无人机与参考点集合中各参考点计算得到无人机在对应时刻所对应的调速参考值rp;
12、第五步,根据sy=f(rp)计算得到无人机的预调速度sy,sy与rp成正比;
13、间歇更新的预调速度sy;获取无人机当前的实际飞行速度sj;
14、当|sy-sj|/sj>θ成立时,则将无人机的飞行速度调整至sy,当不成立时,则无人机继续按照实际飞行速度sj进行飞行。
15、进一步的,每隔预设的时间或者无人机每运动预设的距离,则对无人机对应的参考点集合进行更新。
16、进一步的,调速参考值rp的计算方法为:将一个时刻无人机对应的参考点集合中的参考点标记为xi,其中1≤i≤n,n为该时刻无人机对应的参考点集合中参考点的数量;
17、获取无人机与参考点集合中各参考点之间的距离ri;
18、根据公式计算得到调速参考值rp。
19、进一步的,调速参考值rp的计算方法为:将一个时刻无人机对应的参考点集合中各参考点的巡检系数标记为ki;
20、根据公式计算得到调速参考值;
21、其中α1、α2、β1、β2均为预设系数,kp为参考点集合中n个巡检系数ki的平均值,kmax为参考点集合中n个巡检系数ki中的最大值。
22、进一步的,θ取值为15%。
23、进一步的,当计算得到的预调速度sy大于预设值sy1,且满足|sy-sj|/sj>θ成立时,则将无人机的飞行速度调整至sy1;
24、当计算得到的预调速度sy小于预设值sy2,且满足|sy-sj|/sj>θ成立时,则将无人机的飞行速度调整至sy2;
25、其中sy1大于sy2。
26、进一步的,获取无人机在bim三维模型中空间坐标的方法为:
27、在无人机巡检路径上分布设置若干个定位摄像头;
28、在无人机按照巡检路径飞行时,获取至少两个定位摄像头与无人机之间的距离;
29、获取各定位摄像头在三维模型中的空间坐标,并根据该坐标以及定位摄像头与无人机之间的距离获取无人机在bim三维模型中的空间坐标。
30、本发明的有益效果:
31、1、相较于通过地面行驶机器人搭载传感器进行巡检的方式,本发明采用无人机作为载体,巡检时覆盖的空间更大,且在垂直方向上运动更加灵活,从而有效提升巡检效率。
32、2、本发明根据巡检路径上巡检点的分布主动的对无人机的飞行速度进行调整,因此无人机所负载的摄像头等前端信息采集设备能够在巡检要求较高以及巡检密度较大的区域获取密度更大的图像信息,而在巡检要求较低以及巡检密度较小的区域,则可以相应提升无人机的飞行速度,在不影响对巡检图像信息获取的同时,提升无人机的巡检效率。
技术特征:1.一种泵站智能机器人巡检系统,其特征在于,包括:
2.根据权利要求1所述的一种泵站智能机器人巡检系统,其特征在于,每隔预设的时间或者无人机每运动预设的距离,则对无人机对应的参考点集合进行更新。
3.根据权利要求1所述的一种泵站智能机器人巡检系统,其特征在于,调速参考值rp的计算方法为:将一个时刻无人机对应的参考点集合中的参考点标记为xi,其中1≤i≤n,n为该时刻无人机对应的参考点集合中参考点的数量;
4.根据权利要求1所述的一种泵站智能机器人巡检系统,其特征在于,调速参考值rp的计算方法为:将一个时刻无人机对应的参考点集合中各参考点的巡检系数标记为ki;
5.根据权利要求1所述的一种泵站智能机器人巡检系统,其特征在于,θ取值为15%。
6.根据权利要求1所述的一种泵站智能机器人巡检系统,其特征在于,当计算得到的预调速度sy大于预设值sy1,且满足|sy-sj|/sj>θ成立时,则将无人机的飞行速度调整至sy1;
7.根据权利要求1所述的一种泵站智能机器人巡检系统,其特征在于,通过室内定位单元获取无人机在bim三维模型中空间坐标的方法为:
技术总结本发明公开了一种泵站智能机器人巡检系统,属于智慧水利技术领域,该巡检系统根据巡检路径上巡检点的分布主动的对无人机的飞行速度进行调整,因此无人机所负载的摄像头等前端信息采集设备能够在巡检要求较高以及巡检密度较大的区域获取密度更大的图像信息,而在巡检要求较低以及巡检密度较小的区域,则可以相应提升无人机的飞行速度,在不影响对巡检图像信息获取的同时,提升无人机的巡检效率,相较于通过地面行驶机器人搭载传感器进行巡检的方式,本发明采用无人机作为载体,巡检时覆盖的空间更大,且在垂直方向上运动更加灵活,从而有效提升巡检效率。技术研发人员:李海涛,吕海乐,刘轶群,方国材,褚梦微,王媛媛,杨东升受保护的技术使用者:中水三立数据技术股份有限公司技术研发日:技术公布日:2024/9/29本文地址:https://www.jishuxx.com/zhuanli/20241009/305876.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表